




核心观点就是非线性的控制系统在某个要求的工况点位可以用线性的系统去拟合,然后再对这个线性系统进行建模设计。
对于线性系统的拟合可以用线性化工具,先用线性化管理工具确定系统的输入和输出,一般都是闭环的负反馈控制,所以线性化管理器中的输入选择输入扰动,输出选择输出测量。
然后选择线模型性化器
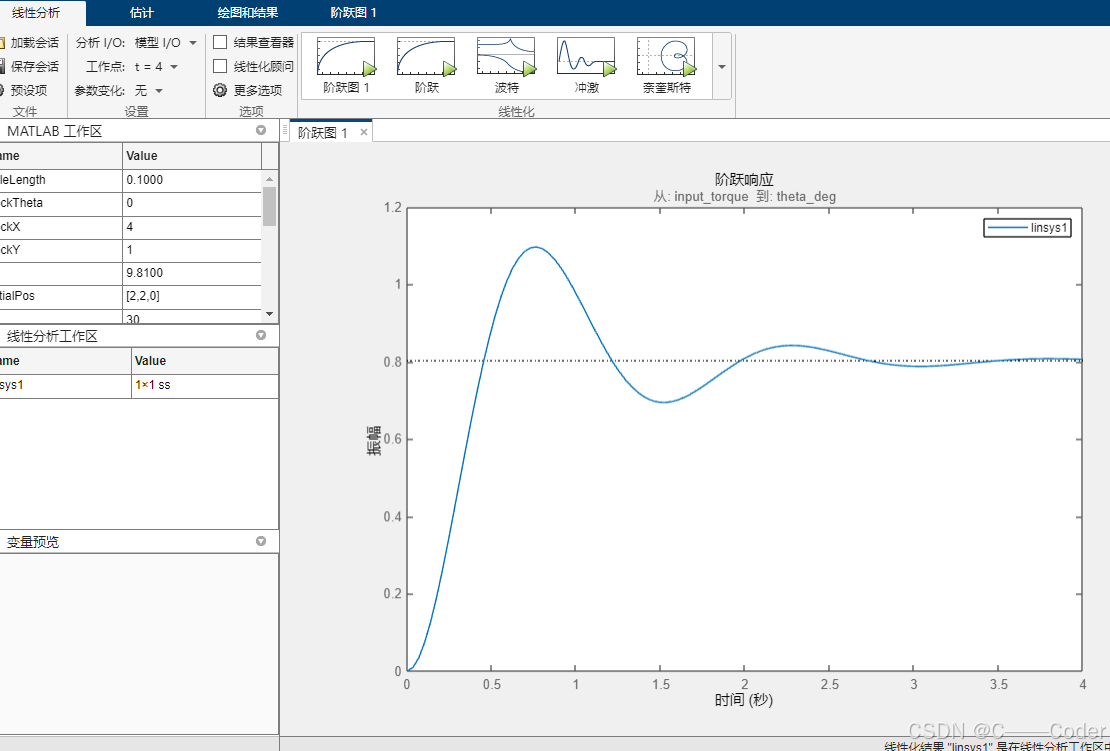
然后设置仿真的工况点的时间,大部分控制都是阶跃信号(可以根据自己实际的控制模型选择对应的线性化模型),生成响应图,然后再阶跃图中右键特征可以看到系统的响应时间,超调量,稳态时间等。线性分析工作区就是输出的线性化模型,可以直接导入到matlab的工作区。
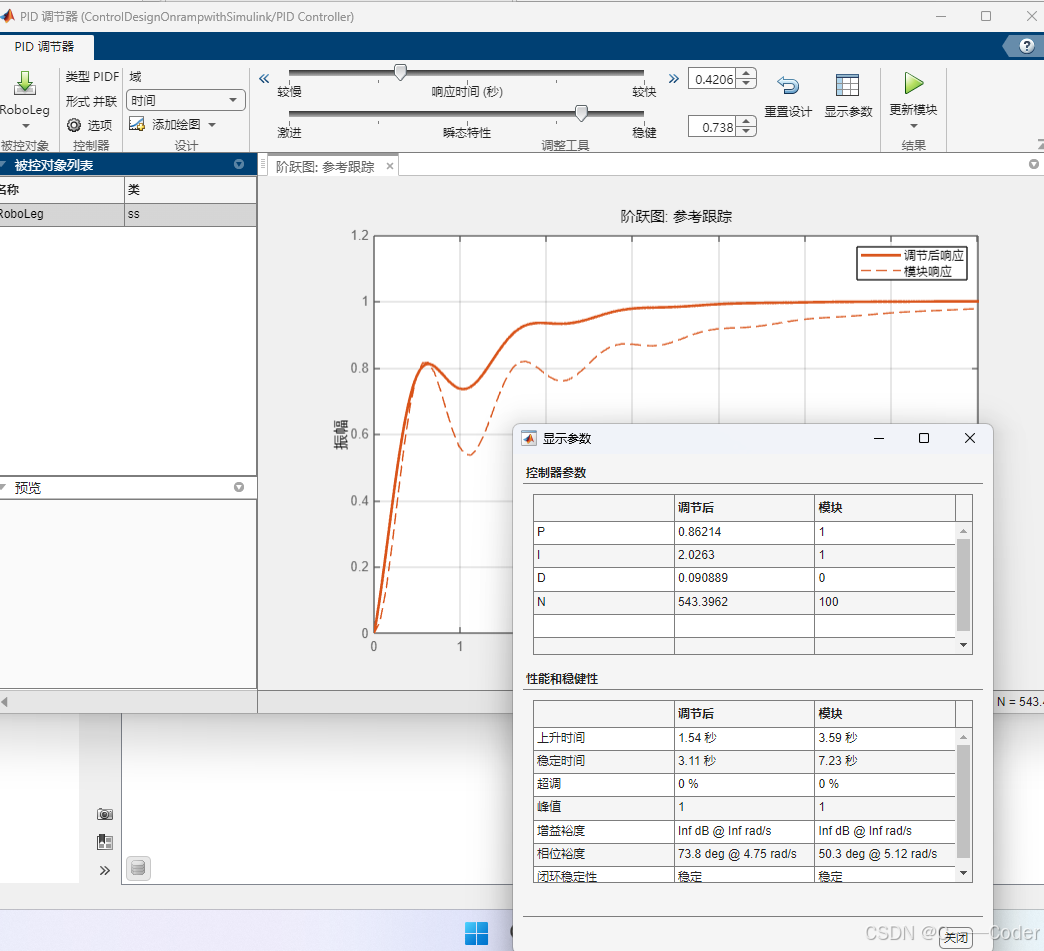
最后我们可以根据这个模型来用simulink的PID模块进行调节,导入刚刚的线性化模型,利用调整工具调节,然后显示参数可以查看调节的效果,然后点击更新模块到PID模块里面。PID模块还可以单独设置输出幅值限制和积分抗饱和。

















 2896
2896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









