



记录自己手写带霍尔FOC角度线性差值处理
这里假设电机控制的霍尔角度是间隔120°电角度安装,得到的霍尔信号值的变化规律是1->3->2->6->4->5.这个涉及到霍尔的安装位置,网络上有很多资料,这里不再赘述.
这里差值我用的最基本的线性差值来处理,因为霍尔安装的位置是由差异的,所以是取了平均值,然后从微观的角度看,速度很难出现大的突变,可以近似的理解为相邻的两个扇区的时间是接近的,在进行加速或者减速的时候不会出现剧烈变化。出现堵转需要用电流来判断 ,这种线性差值得到的霍尔角度很难处理。
因为每个扇区是60°电角度,每个扇区的时间是T,那每一个刻度就是60/T,我们在FOC控制中断里面不停的累加这个刻度,就可以得到线性的角度,然后在扇区切换时对角度进行补偿。
下面是代码
结构体及宏定义
#define HALL_BUFFER_LEN 8 //取平均值的数组大小
#define HALL_ZERO_CW_OFFSET 5 //正转补偿角度--未使用
#define HALL_ZERO_CCW_OFFSET (-5) //反转补偿角度--未使用
struct FOC_HALL
{
uint8_t signal; //霍尔信号值
uint8_t lastSignal; //上一次的霍尔信号值
uint8_t err; //记录霍尔信号错误
uint32_t BufferCount; //平均值计数
uint32_t Buffer[HALL_BUFFER_LEN]; //缓存区间
uint32_t BufferSum; //缓存输出结果
uint32_t SectCount; //每个霍尔周期的计数器
float SecotrAngel; //单个扇区里面差值出的角度
float angle; //线性差值得到的角度
float speed; //电机电转速 r/pm
float lastSpeed; //上一个周期电转速
float AccSpeed; //电机电转速加速度
uint16_t Peroid; //每个扇区的持续时间
uint16_t Count; //计数器
};
函数实现
#define PI (3.141526535f) //Pi的数学的定义
struct FOC_HALL Foc_Hall_Ctrl;
/*!
*@prototype void Foc_Hall_Init(void)
*@param[in] none
*@return none
*@brief 霍尔信号处理初始化
*/
void Foc_Hall_Init(void)
{
Foc_Hall_Ctrl.AccSpeed = 0.0f;
Foc_Hall_Ctrl.lastSpeed = 0.0f;
Foc_Hall_Ctrl.angle = 0.0f;
Foc_Hall_Ctrl.signal = 1;
Foc_Hall_Ctrl.SecotrAngel = 0.0f;
Foc_Hall_Ctrl.speed = 0.0f;
Foc_Hall_Ctrl.BufferSum = 500;
}
/*!
*@prototype void FOC_HallAngle_Change(struct FOC_HALL* ptr)
*@param[in] Pointer For Hall FOC
*@return none
*@brief 模拟霍尔信号值变化,这里后面可以放在霍尔中断里面更新实际的霍尔信号
*/
uint8_t sectos[6] = {1 ,3, 2, 6 ,4 ,5};
uint8_t Cnt = 0;
void FOC_HallAngle_Change(struct FOC_HALL* ptr)
{
//模拟信号值变化按照120度霍尔安装,1->3->2->6->4->5
ptr->signal = sectos[Cnt];
Cnt = (Cnt + 1) % 6;
}
/*!
*@prototype void Foc_HallAngle_Calc(struct FOC_HALL* ptr)
*@param[in] Pointer For Hall FOC
*@param[in] flag: Secotr Changed
*@return none
*@brief 进行电角度估算,这个需要放在FOC中断里面
*/
void Foc_HallAngle_Calc(struct FOC_HALL* ptr ,uint8_t flag)
{
int i = 0, sum = 0;
//扇区出现切换
if(flag)
{
switch(ptr->signal)
{
case 1:
ptr->angle = 0 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum;
break;
case 2:
ptr->angle = PI / 3 * 2 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum ;
break;
case 3:
ptr->angle = PI / 3 * 1 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum;
break;
case 4:
ptr->angle = PI / 3 * 4 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum;
break;
case 5:
ptr->angle = PI / 3 * 5 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum ;
break;
case 6:
ptr->angle = PI / 3 * 3 + ptr->SectCount * 2* PI / 6 / ptr->BufferSum;
break;
}
}
ptr->SectCount++;
//角度大小固定到0~2 * PI
if(ptr->angle >= 2 * PI)
{
ptr->angle -= 2 *PI;
}
if(ptr->signal != ptr->lastSignal)
{
ptr->lastSignal = ptr->signal;
//计算平均值
if(ptr->BufferCount >= HALL_BUFFER_LEN)
{
ptr->BufferCount = 0;
}
ptr->Buffer[ptr->BufferCount++] = ptr->SectCount;
ptr->SectCount = 0;
for(i = 0;i < HALL_BUFFER_LEN;i++)
{
sum += ptr->Buffer[i];
}
ptr->BufferSum = sum / HALL_BUFFER_LEN;
}
}
测试函数
uint16_t Hall_Peroid = 200;
uint16_t Hall_Cnt = 0;
uint8_t HallSecChangeflag = 0;
int8_t Acc;
//1ms执行一次
static void TestHallSignal(void)
{
if(Hall_Cnt >= Hall_Peroid)
{
FOC_HallAngle_Change(&Foc_Hall_Ctrl);
Hall_Cnt = 0;
HallSecChangeflag = 1;
Foc_Hall_Ctrl.SecotrAngel = 0.0f;
Foc_Hall_Ctrl.Count = 0;
//控制加速,最快10ms60°
if(Acc == 1)
{
if(Hall_Peroid >= 15)
{
Hall_Peroid -= 5;
}
else
{
Hall_Peroid = 10;
}
}
else if(Acc == -1) //控制加速,最慢500ms60°
{
if(Hall_Peroid <= 500)
{
Hall_Peroid +=5;
}
else
{
Hall_Peroid = 500;
}
}
}
else
{
Hall_Cnt++;
}
Foc_Hall_Ctrl.Peroid = Hall_Peroid;
Foc_Hall_Ctrl.speed = 1.0f * 1000 / (6 * Hall_Peroid); //转换成rpm
Foc_Hall_Ctrl.AccSpeed = Foc_Hall_Ctrl.speed - Foc_Hall_Ctrl.lastSpeed;
Foc_Hall_Ctrl.lastSpeed = Foc_Hall_Ctrl.speed;
}
测试结果
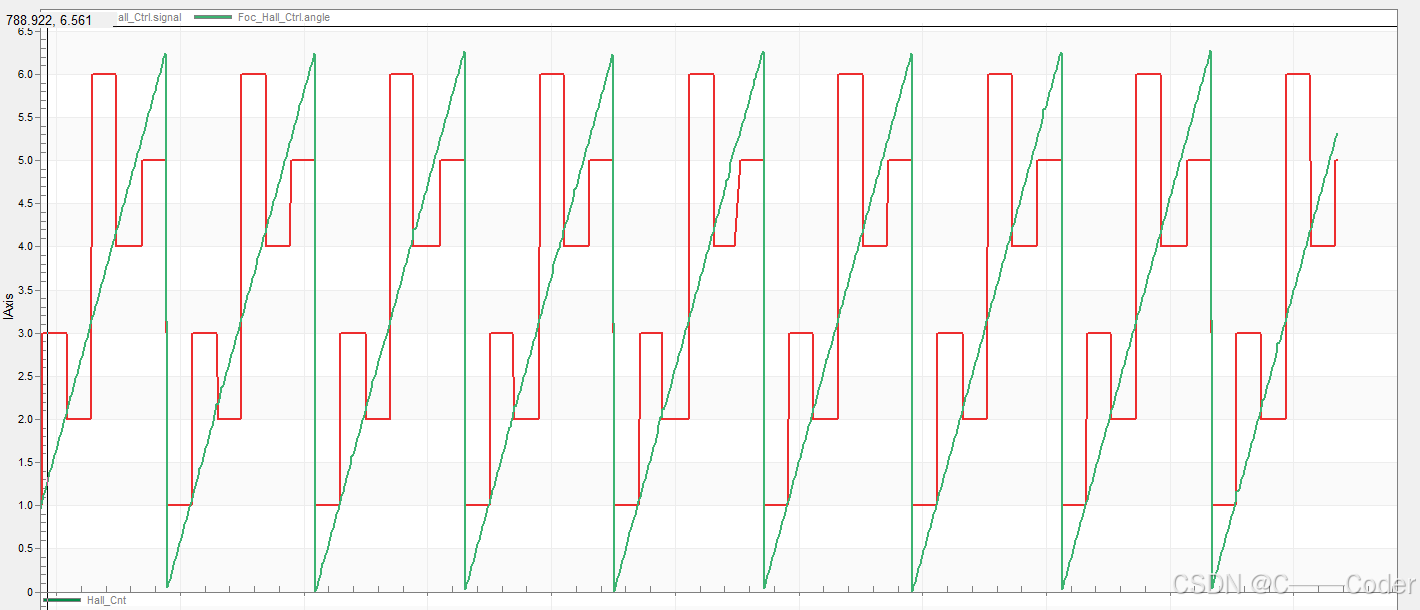
恒定转速运行,红色的扇区号,绿色的估算的电角度
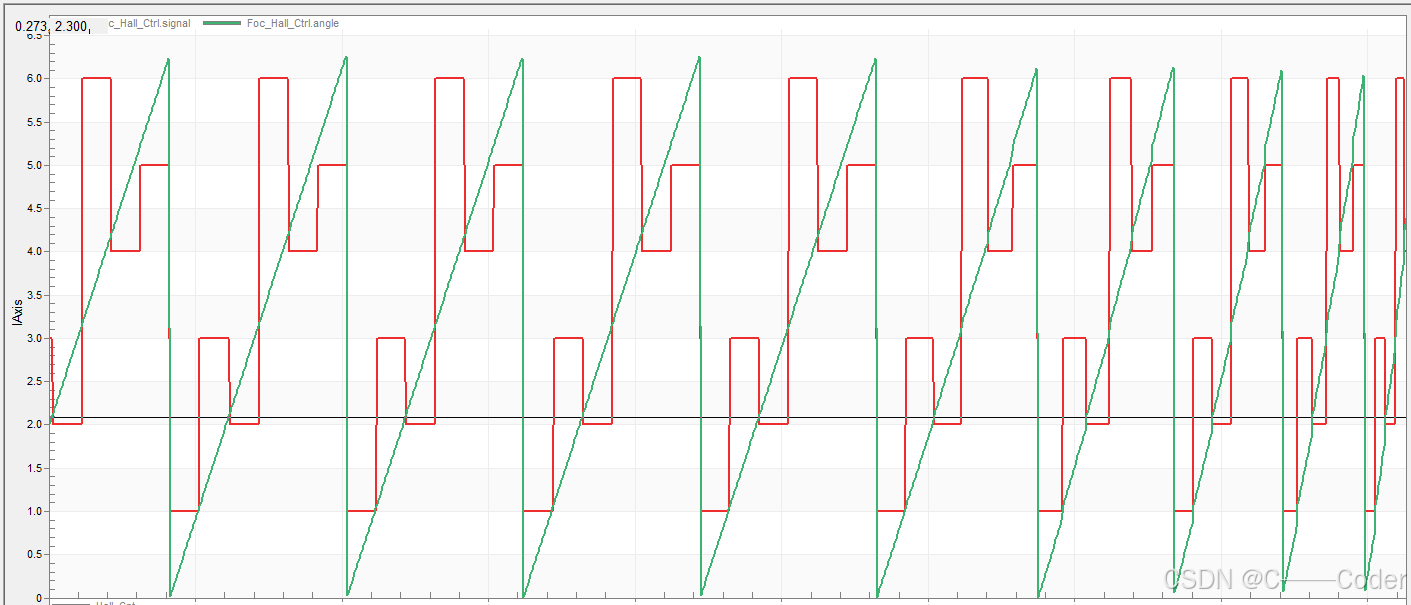
模拟减速过程,扇区的间隔时间5ms递增
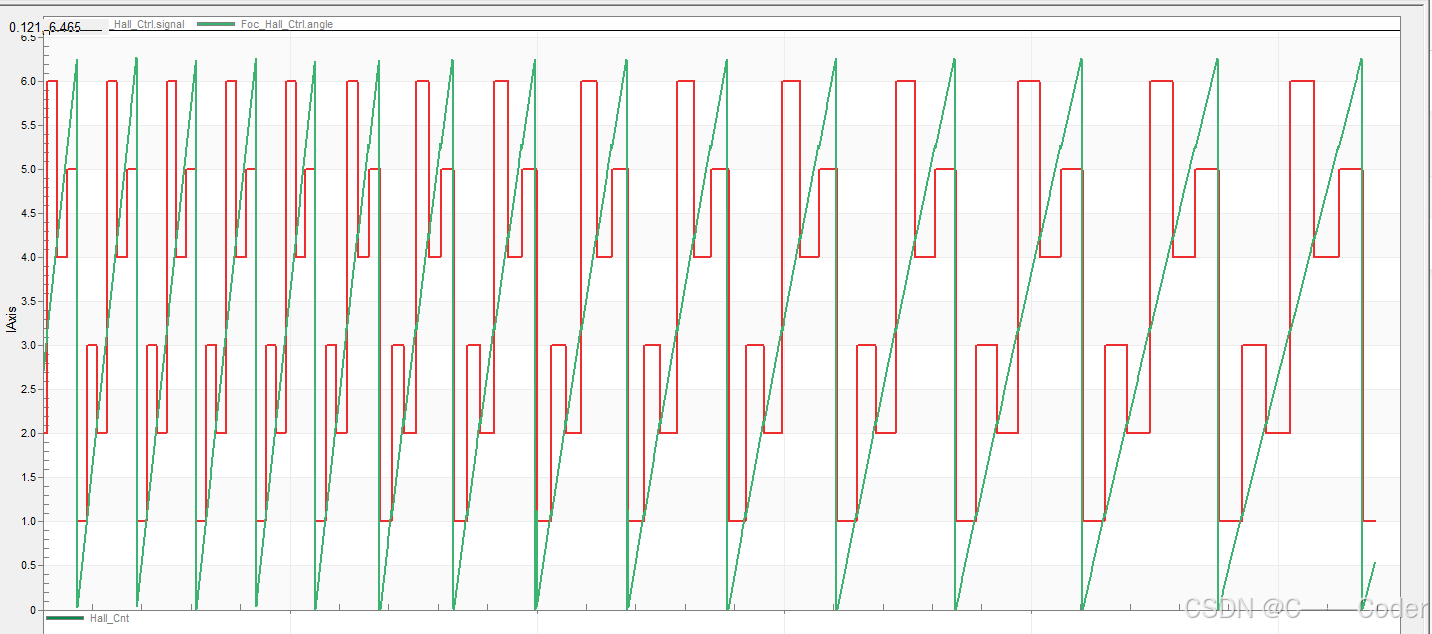
模拟加速过程,扇区间隔每个5ms递减

















 1370
1370



 到【灌水乐园】发言
到【灌水乐园】发言







