



原本的lio_sam编译和运行都可能遇到一些问题,这里我们推荐的环境是ros1 noetic,ubuntu20的环境,接下来是修改的内容.
gtsam
安装gtsam就不用多说了,只是要注意一下适用的版本.我使用的是gtsam-4.2-ros或者gtsam-4.0.0-alpha2两种.
sudo add-apt-repository ppa:borglab/gtsam-release-4.0
sudo apt install libgtsam-dev libgtsam-unstable-dev
Eigen3
有些可能会遇到无法找eigen3的问题,它在/usr/include中,我们把它复制一下
sudo cp -r /usr/include/eigen3 /usr/local/include
opencv
In file included from /home/cyun/jone_ws/src/LIO-SAM/src/mapOptmization.cpp:1:
/home/cyun/jone_ws/src/LIO-SAM/include/utility.h:18:10: fatal error: opencv/cv.h:
没有那个文件或目录
18 | #include <opencv/cv.h>
这个是很常见的问题,在ubuntu20中已经没有#include <opencv/cv.h>了,而是换成了:
#include<opencv2/imgproc.hpp>
pcl
接下来编译时可能会遇到非常多的问题,这些主要都是pcl使用的编译器版本太低的问题,同样的,在ubuntu20中我们更加常用的是c++14,前往liosam的cmakelist中,修改:
set(CMAKE_CXX_FLAGS "-std=c++14")
设置为14即可.
运行时的问题
这个也可能会遇到,这是在编译gtsam之后仍然找不到指定的库的问题,我们需要复制一下.
首先我们已经是安装了gtsam的基础上,libmetis.so会安装在/usr/local/lib的默认位置,但是当启动ros功能包的时候,找的地方是/opt/ros/noetic/lib,所以复制一下:
sudo cp /usr/local/lib/libmetis.so /opt/ros/noetic/lib/
此外,由于原本的lio-sam是同时有lidar,imu,rtk的,我们需要安装定位的功能包:
sudo apt install ros-noetic-fake-localization ros-noetic-robot-localization
并且要注意,在使用lio-sam的时候,要标定好lidar和imu的外参矩阵,比如:
extrinsicRot: [-1, 0, 0,
0, 1, 0,
0, 0, -1]
extrinsicRPY: [0, -1, 0,
1, 0, 0,
0, 0, 1]
下载bag包进行测试
google云盘链接:https://drive.google.com/drive/folders/1rCQFxLjM4rZsUFroNu3zShsyYdHNTG-v?usp=sharing
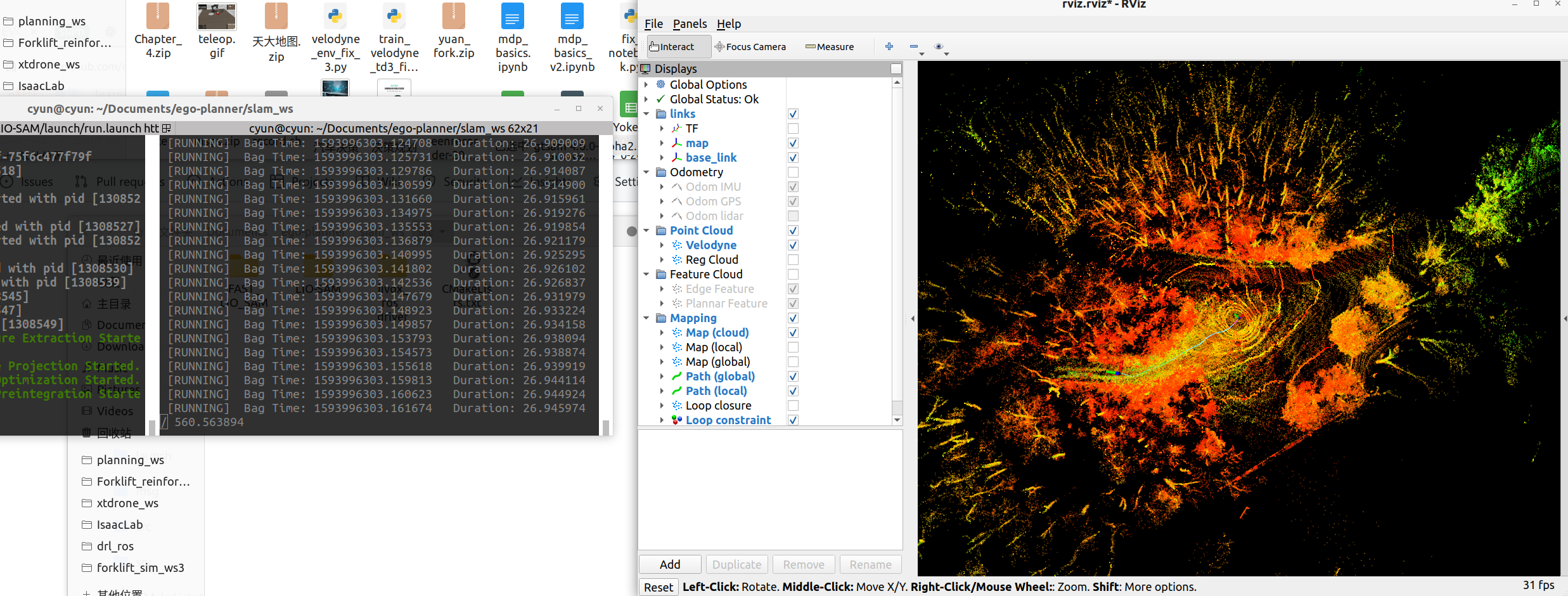
不需要再修改params.yaml,直接运行算法:
roslaunch lio_sam run.launch
然后播放bag包:
rosbag play park_dataset.bag
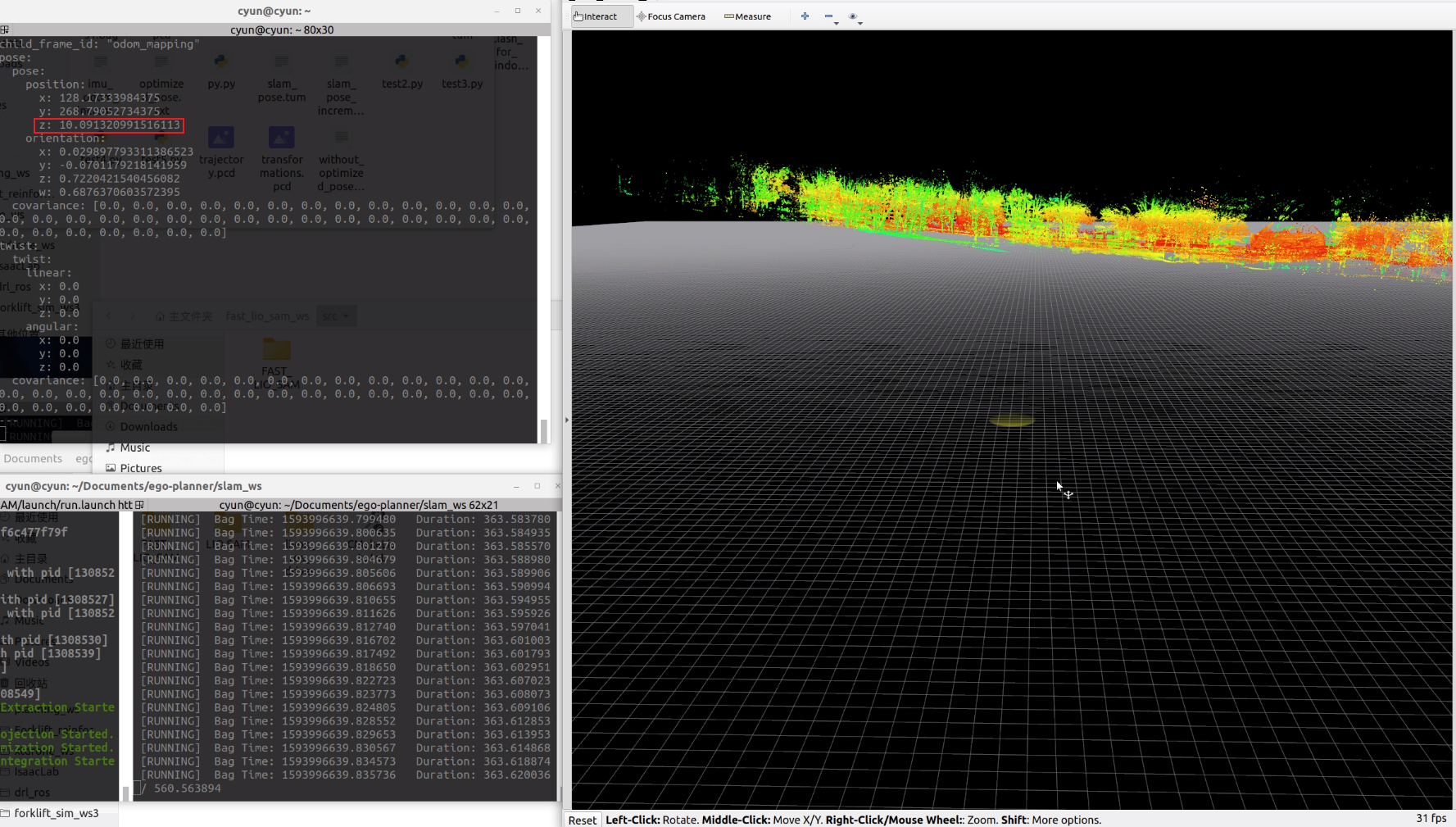
等待一段时间建图结束
注意,这种高度问题不是slam出现了问题!!!,是有可能出现这样的上翘的,并不是算法或者数据有问题,不要被误导了…
保存地图
调用服务的格式是
rosservice call [service] [resolution] [destination]
比如
rosservice call /lio_sam/save_map 0.2 "/Downloads/LOAM/"
当然也可以在yaml中配置是否保存地图
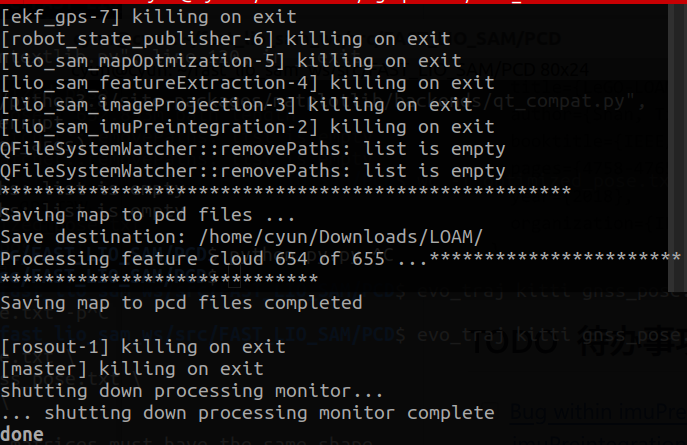
这样关闭程序就也可以保存对应的地图了.
后记
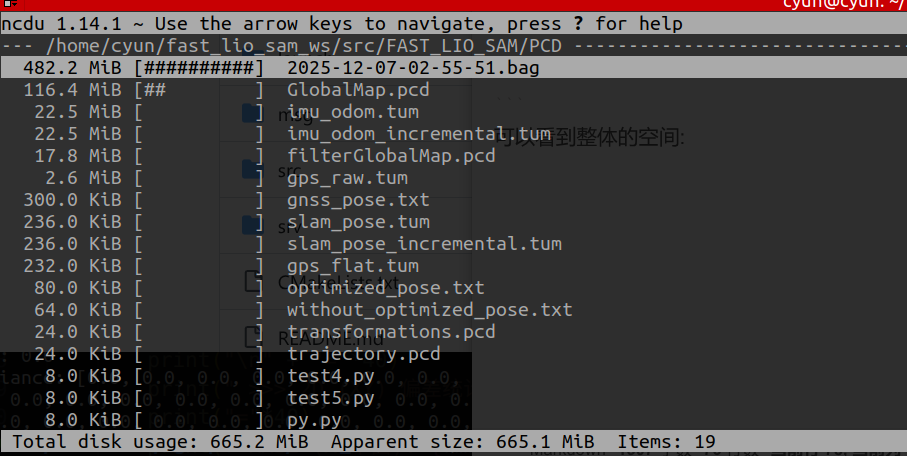
另外再推荐一下linux中的存储空间的终端工具:
sudo apt install ncdu
然后
ncdu .
可以看到空间的占用情况:



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











