



本系列内容主要是深入分析ego_planner算法的实现,并且将核心的算法部分转化为非ros依赖的形式(Cmake项目),实现上我们主要通过共享内存与ros的仿真环境进行数据交换.
项目链接:https://github.com/chan-yuu/ego_planner_standalone.git
如果觉得有用的话不要忘了star哦.
├── application # gui界面,用于快速启动程序
│ └── ego_planner_gui.py
├── docs
│ ├── 1.0
│ ├── png
│ └── scripts
├── ego-planner # ros环境部分,包括感知信息
│ ├── modified_realsense2_camera.zip
│ └── src
├── planner_standalone # 独立的算法模块.
│ ├── build # 编译到build中的可执行文件.
│ ├── CMakeLists.txt
│ ├── include
│ └── src
└── README.md
ego_planner_standalone
本项目将原始的ROS EGO-Planner分离为两部分:
- ROS Bridge (
ego-planner/src/ros_bridge): 处理ROS消息和共享内存通信 - Planner Standalone (
planner_standalone): 无ROS依赖的纯C++规划算法
当前架构
数据流
仿真环境 (simulator)
↓
ROS话题订阅
↓
ROS Bridge Node
↓
共享内存 (Shared Memory)
↓
Planner Standalone (FSM + 算法)
↓
共享内存 (Shared Memory)
↓
ROS Bridge Node
↓
ROS话题发布 → Traj Server → 控制器
输入数据(从仿真环境)
-
定位数据 (
/visual_slam/odom)- 位置、速度、姿态
- 频率: ~100Hz
-
点云数据 (
/grid_map/occupancy_inflate)- 已膨胀的障碍物点云
- 频率: ~10Hz
- 注意: 仿真已完成膨胀,算法端不需要再处理
-
目标航点 (
/waypoint_generator/waypoints)- 目标位置
- 事件驱动(用户在RViz中点击)
输出数据(给控制器)
-
B样条轨迹 (
/planning/bspline)- 控制点
- 节点向量 (knots)
- 轨迹ID
- 发布给
traj_server
-
轨迹可视化 (
/planning/bspline_path)- Path消息格式
- 用于RViz显示
-
规划器状态 (
/planning/planner_state)- FSM状态 (INIT, WAIT_TARGET, GEN_NEW_TRAJ, etc.)
算法流程
整个规划器的运行逻辑由 main.cpp 驱动,通过 EGOPlannerManager 协调各个模块。
使用方法
pip install pyside6
python application/ego_planner_gui.py
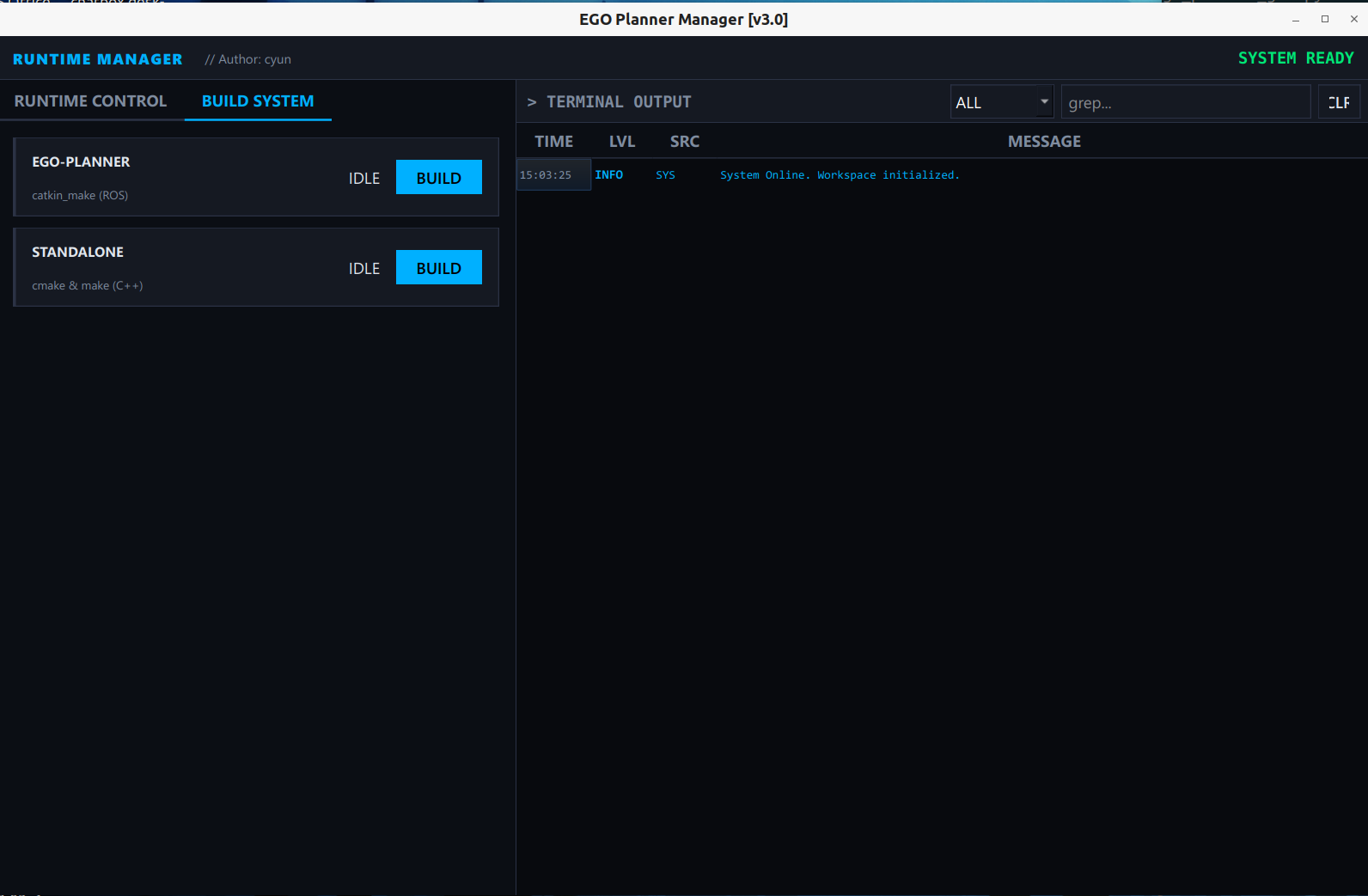
到build界面中,编译两个部分:
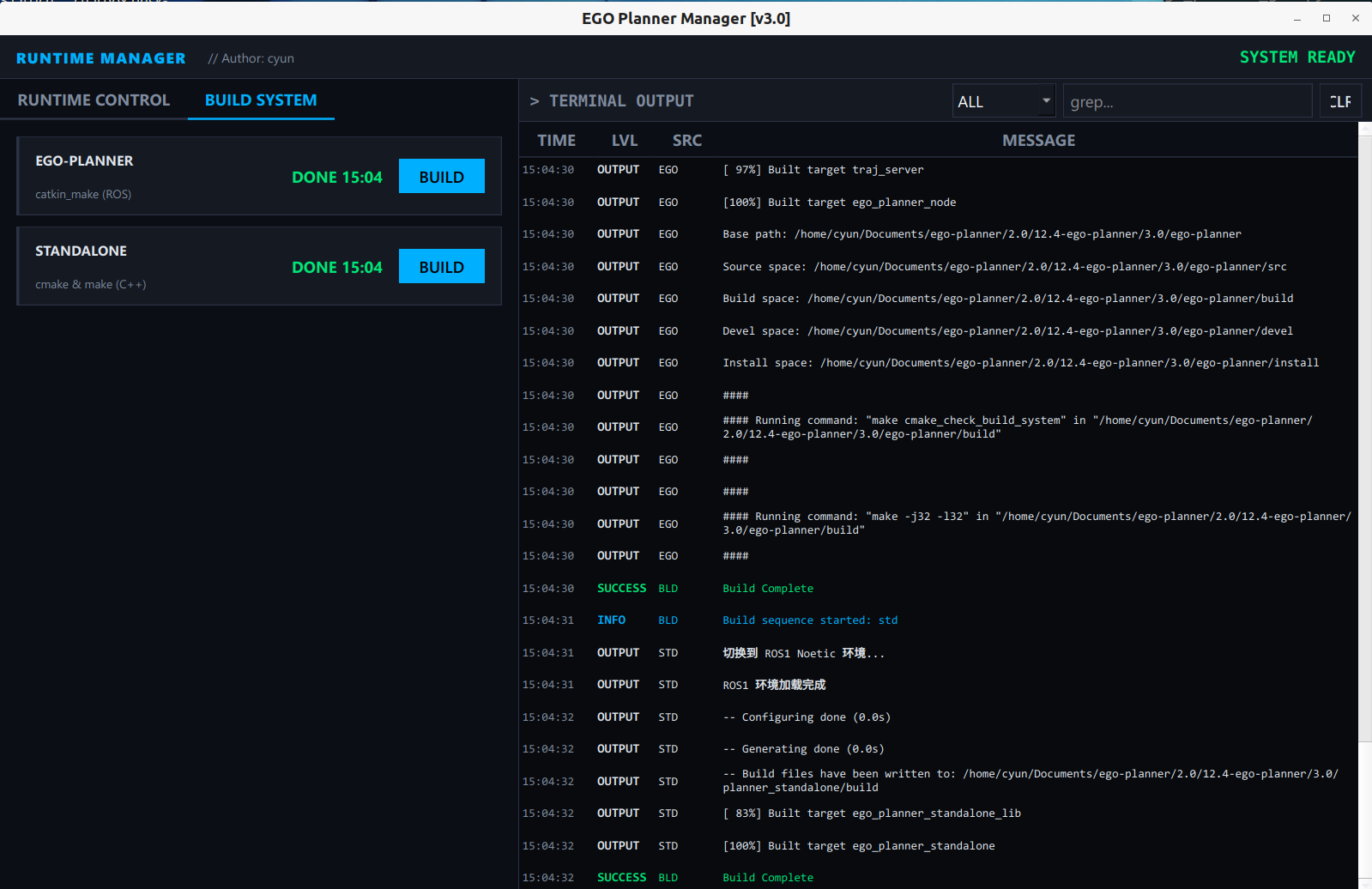
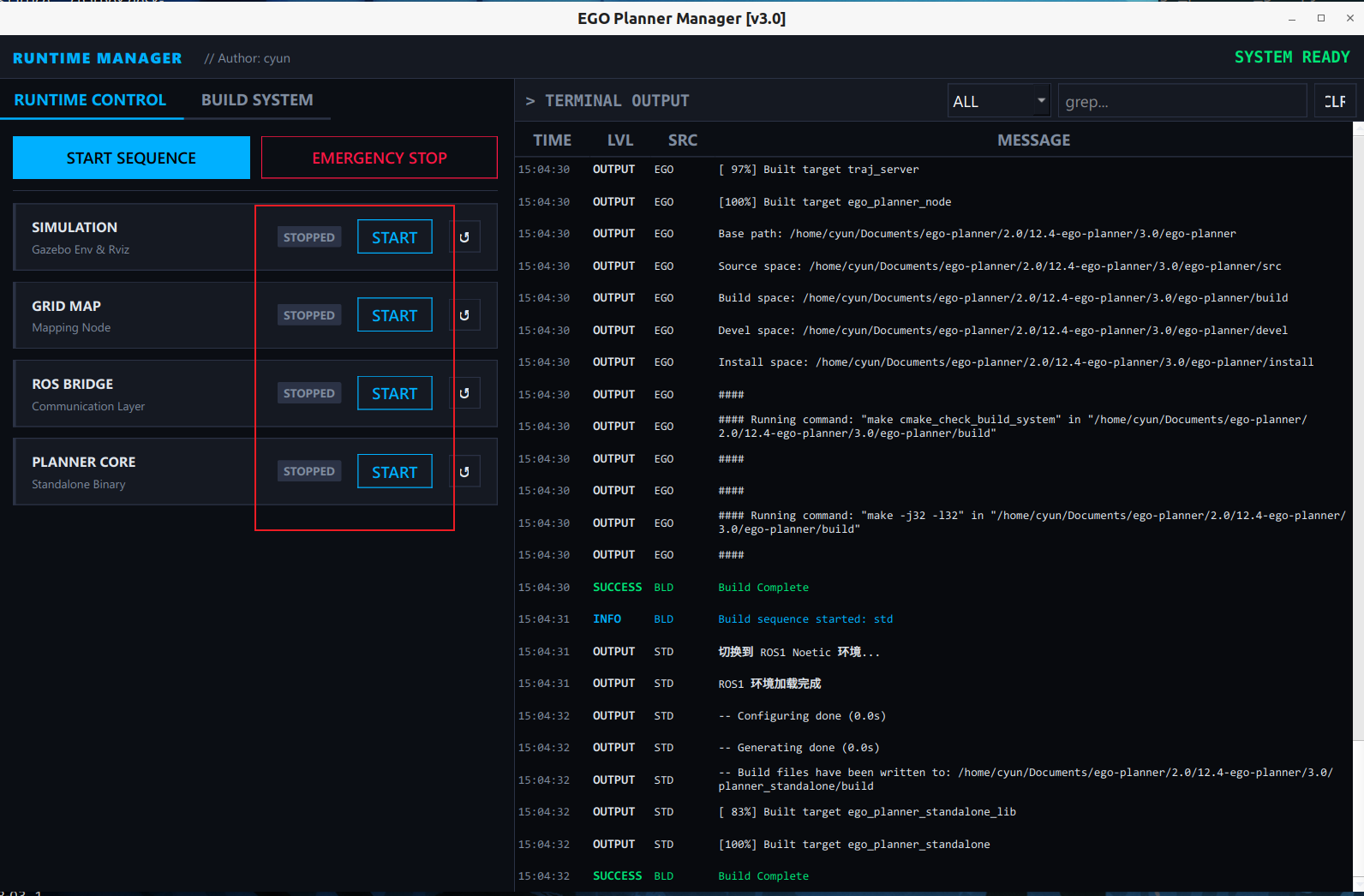
编译完成后,就可以直接启动了,其中前面两个大的是总的启动按钮,可以运行四个start
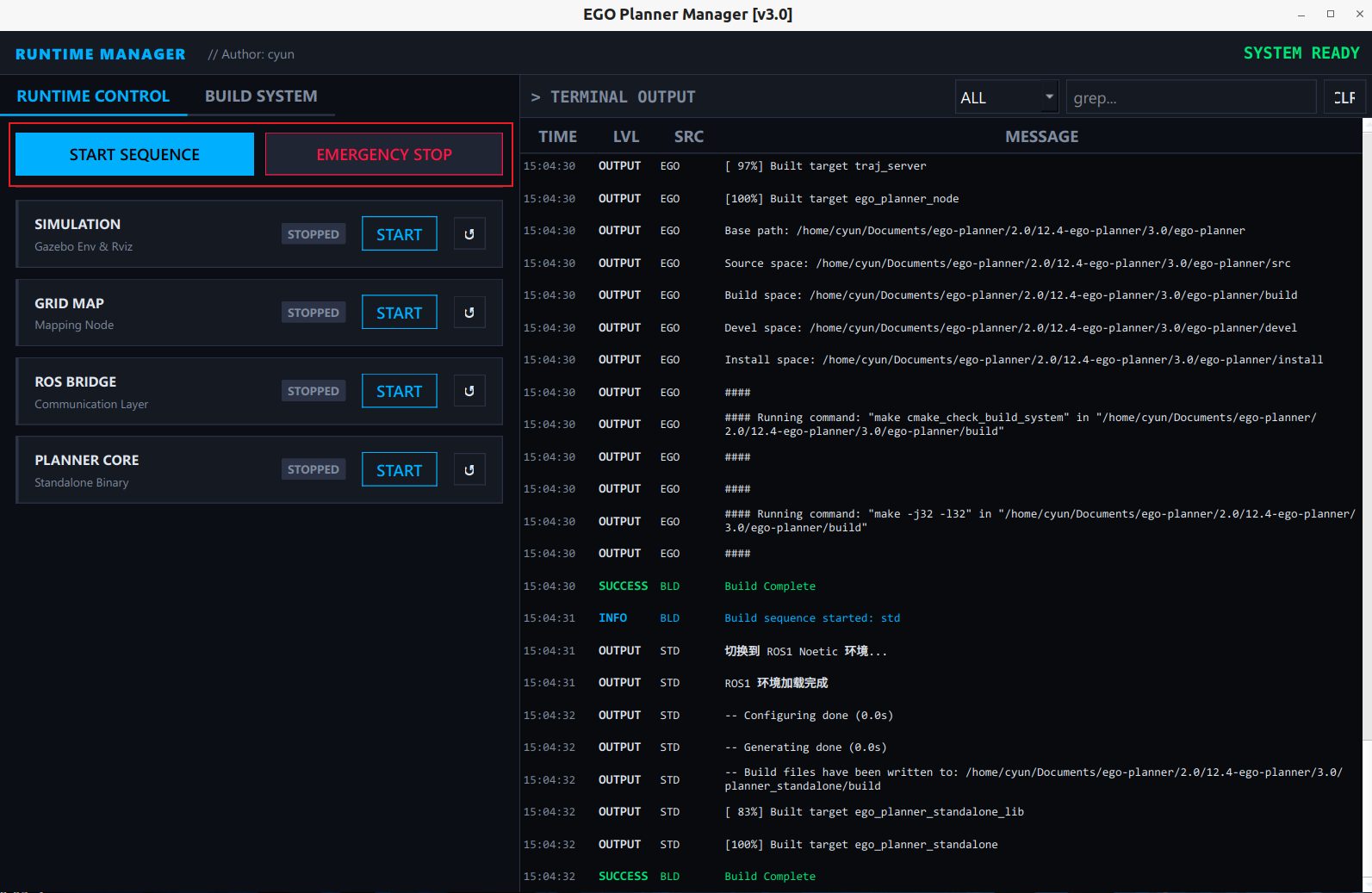
或者按照顺序启动下面的四个start即可.
对应的命令是:
cd ego-planner;source devel/setup.bash && roslaunch ego_planner_bridge sim_only.launch
cd ego-planner;source devel/setup.bash && roslaunch grid_map_standalone test_grid_map.launch
cd ego-planner;source devel/setup.bash && roslaunch ego_planner_bridge run_bridge.launch
cd planner_standalone/build;./ego_planner_standalone



















 1609
1609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











