




 本文详细介绍了马尔可夫过程、马尔可夫奖励过程,重点阐述了马尔科夫决策过程(MDP),包括其构成要素(状态、动作、转移概率、奖励函数和折扣因子),以及价值函数(状态值函数和动作值函数)在强化学习中的作用。文章还提及了MDP在优化问题中的应用,如线性模型和非线性模型的预测控制,以及求解方法如SQP和HJB方程。
本文详细介绍了马尔可夫过程、马尔可夫奖励过程,重点阐述了马尔科夫决策过程(MDP),包括其构成要素(状态、动作、转移概率、奖励函数和折扣因子),以及价值函数(状态值函数和动作值函数)在强化学习中的作用。文章还提及了MDP在优化问题中的应用,如线性模型和非线性模型的预测控制,以及求解方法如SQP和HJB方程。
本篇主要介绍马尔科夫决策(MDP)过程,在介绍MDP之前,还需要对MP,MRP过程进行分析。
马尔科夫性质
马尔可夫性是指一个系统,在给定当前状态的情况下,未来的状态仅依赖于当前状态,而不依赖于过去的状态。换句话说,当前状态包含了过去所有状态的信息,因此未来的状态可以完全由当前状态决定。说白了就是带遗忘性质,下一个状态S_t+1仅与当前状态有关,而与之前的状态无关。

为什么需要马尔科夫性——简化环境模型。帮助强化学习来学习。
这种性质对于建模环境至关重要,因为它简化了问题的复杂性,并且使得我们能够用一个简洁的方式描述系统的动态演化。在强化学习中,马尔可夫性质的存在使得我们可以使用MDP来建模智能体与环境的交互,从而进行有效的决策和学习。
什么是马尔可夫过程(MP)
马尔科夫过程:通过状态转移概率的实现的过程,马尔科夫过程是一个**<S,P>**,S是有限状态集合,P是状态转移概率。
马尔可夫过程是指一个满足马尔可夫性质的随机过程。一个马尔可夫过程由状态空间
S
S
S和状态转移概率矩阵
P
P
P组成。状态转移概率矩阵
P
P
P表示了从一个状态转移到另一个状态的概率。
什么是马尔可夫奖励过程(MRP)
马尔科夫奖励过程:马尔可夫奖励过程是在马尔可夫过程的基础上增加了奖励的概念。一个马尔可夫奖励过程由状态空间
S
S
S、状态转移概率矩阵
P
P
P和奖励函数
R
R
R组成。奖励函数
R
R
R定义了在特定状态转移过程中,智能体会获得的即时奖励。
在马尔可夫过程的基础上增加奖励函数R和衰减系数γ,基本上一谈到奖励就会有折扣因子的存在。表示为 (S,P,R,γ)。
S
S
S 是状态空间;
P
P
P 是状态转移概率矩阵,表示从一个状态转移到另一个状态的概率;
R
R
R 是奖励函数,表示在状态转移过程中智能体会获得的即时奖励。
对于一个马尔可夫奖励过程,我们可以定义一个状态的预期奖励,即在特定状态下智能体未来可能获得的奖励的期望值。状态
s
s
s的预期奖励可以表示为:

其中,
R
t
R_t
Rt是在时间步
t
t
t时智能体获得的即时奖励,
γ
\gamma
γ是折扣因子。
R是一个奖励函数,S状态下的奖励是某一时t处在状态s下在下一个时刻(t+1)能获得的期望奖励。
期望的含义也就是说与概率是相关的,求概率平均。
累计回报:从t时刻所得到的折扣回报总和。折扣因子表示了对未来奖励的重视程度。越小就是越短视,越大就越远视。

价值函数:价值函数给出了某一状态或某一行为的长期价值。
状态价值函数和动作价值函数来看待问题(强化学习最重要的公式)
注意这里的价值函数可能是状态价值,也可以是动作价值
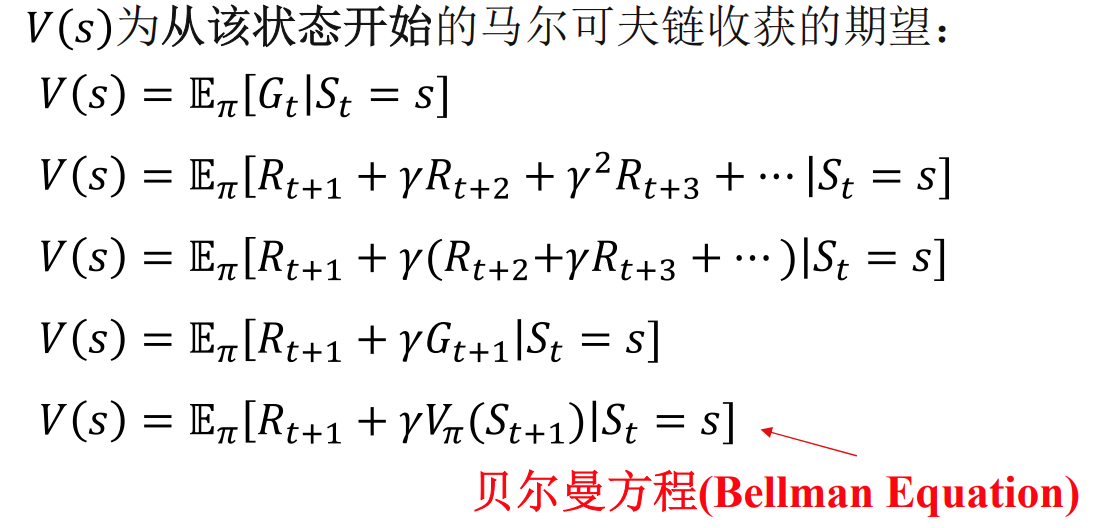
马尔科夫一个重要的内容就是要通过bellman方程求解状态价值函数。
如何求解?
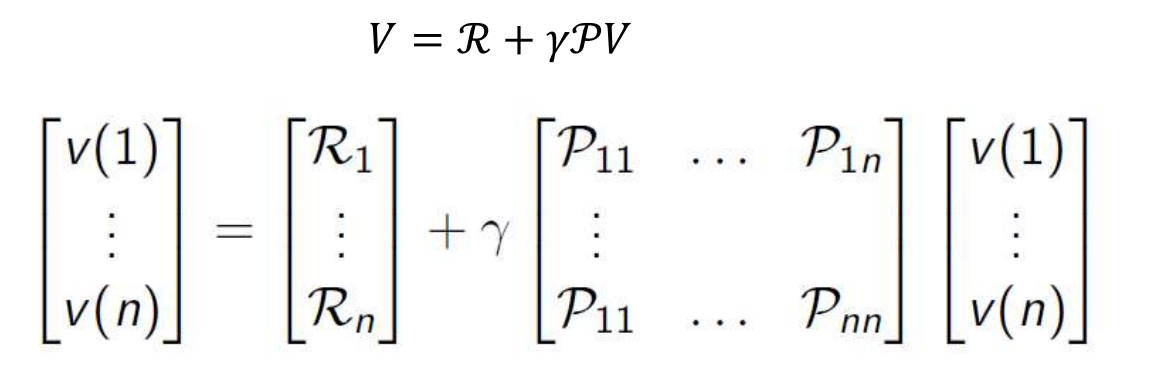
n比较小时直接计算,n比较大时通过迭代来求解:
- 动态规划
- 蒙特卡洛评估
- 时序差分学习
最后就是马尔科夫决策过程MDP了,由(SAPRγ)五元组成。
什么是马尔科夫决策过程?
状态动作,状态转移概率,回报函数,折扣因子
状态(State):描述环境可能处于的各种情况。
动作(Action):智能体可以采取的行动。
状态转移概率(State Transition Probability):描述在采取特定行动后,环境会转移到下一个状态的概率。
奖励函数(Reward Function):描述智能体在特定状态下采取特定行动所获得的即时奖励。
折扣因子(Discount Factor):用于衡量未来奖励的重要性,通常表示为γ(gamma)。
我们可以使用数学符号来表示MDP。假设我们有一个状态空间(State Space)
S
S
S,动作空间(Action Space)
A
A
A,状态转移概率函数
P
P
P,奖励函数
R
R
R,以及折扣因子
γ
\gamma
γ。MDP可以表示为元组
(
S
,
A
,
P
,
R
,
γ
)
(S, A, P, R, \gamma)
(S,A,P,R,γ)。
在MDP中,我们通常会遇到两种主要的函数:状态转移函数和奖励函数。状态转移函数
P
P
P定义了从一个状态到另一个状态的转移概率,可以表示为:
其中,
s
t
s_t
st表示当前状态,
a
t
a_t
at表示采取的动作,
s
t
+
1
s_{t+1}
st+1表示下一个状态。
奖励函数
R
R
R定义了在给定状态和动作的情况下,智能体会获得的即时奖励,可以表示为:
在强化学习中,我们的目标是学习一个策略(Policy),即智能体在特定状态下选择动作的方式。通常,我们会使用价值函数(Value Function)来评估状态或状态-动作对的好坏程度。常见的价值函数包括状态值函数(State Value Function)
V
(
s
)
V(s)
V(s) 和动作值函数(Action Value Function)
Q
(
s
,
a
)
Q(s, a)
Q(s,a)。

MDP就引入了policy的概念,策略是决定行为的机制。强化学习的本质就是最优策略的寻找。
策略同样是仅与当前状态有关。可以是随机策略或者确定性策略。
两大价值函数的引入:
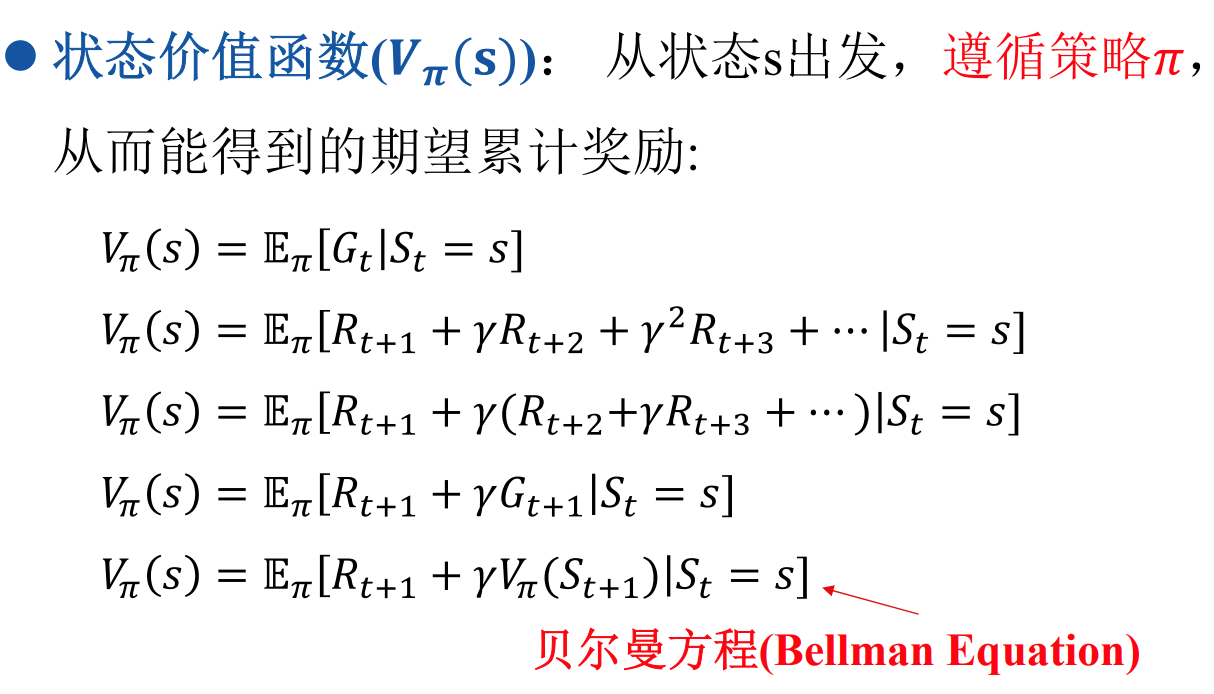
状态值函数(State Value Function)
V
(
s
)
V(s)
V(s) 衡量了在给定策略(Policy)下,智能体处于状态
s
s
s时所能获得的预期回报(Expected Return)。换句话说,它描述了从当前状态开始,智能体在未来可能获得的累积奖励。

其中,
G
t
G_t
Gt 表示从时间步
t
t
t开始的累积奖励,
π
\pi
π 是策略函数,表示智能体在特定状态下采取的动作。
展开如下所示:
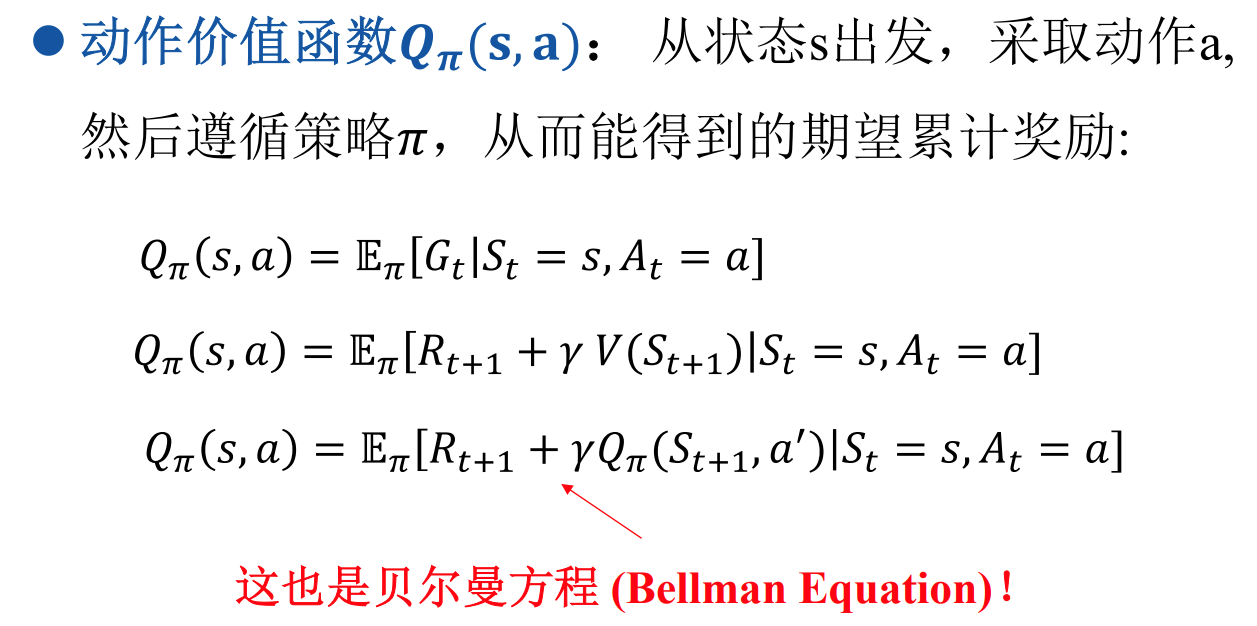
动作值函数(Action Value Function)
Q
(
s
,
a
)
Q(s, a)
Q(s,a) 衡量了在给定策略(Policy)下,智能体处于状态
s
s
s并采取动作
a
a
a时所能获得的预期回报(Expected Return)。换句话说,它描述了在当前状态下采取特定动作后,智能体未来可能获得的累积奖励。

其中,
G
t
G_t
Gt 表示从时间步
t
t
t开始的累积奖励,
π
\pi
π 是策略函数,表示智能体在特定状态下采取的动作。
推导如下所示:
最优理论就是关于价值函数的:
从所有策略产生的状态价值函数中,选取使状态s价值最大的函数:
从所有策略产生的行为价值函数中,选取是状态行为对 价值最大的函数:

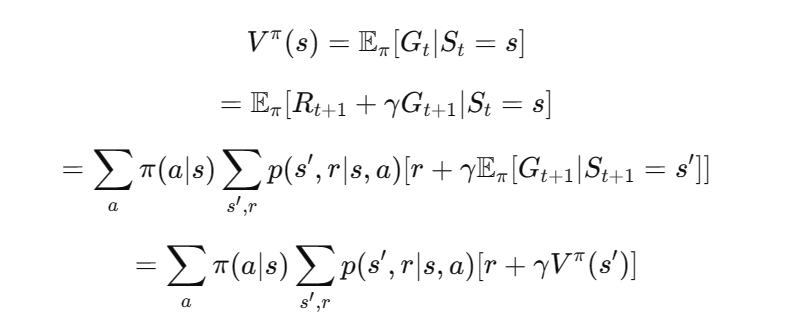
状态值函数的贝尔曼方程
对于状态值函数
V
π
(
s
)
V^{\pi}(s)
Vπ(s),其贝尔曼方程可以表示为:

其中,
π
(
a
∣
s
)
\pi(a|s)
π(a∣s) 表示在状态
s
s
s下选择动作
a
a
a的概率,
p
(
s
′
,
r
∣
s
,
a
)
p(s', r | s, a)
p(s′,r∣s,a) 表示在状态
s
s
s采取动作
a
a
a后,转移到状态
s
′
s'
s′并获得奖励
r
r
r的概率,
γ
\gamma
γ 是折扣因子。
推导如下:
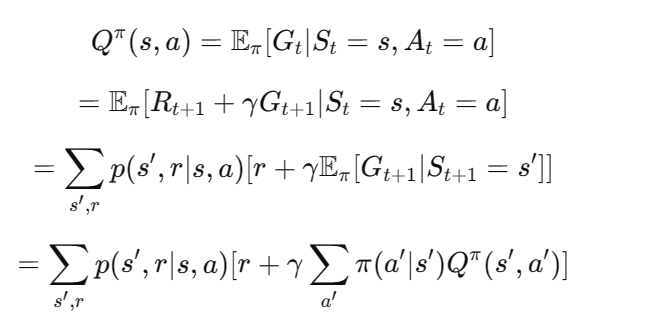
动作值函数的贝尔曼方程
对于动作值函数
Q
π
(
s
,
a
)
Q^{\pi}(s, a)
Qπ(s,a),其贝尔曼方程可以表示为:

其中,
p
(
s
′
,
r
∣
s
,
a
)
p(s', r | s, a)
p(s′,r∣s,a) 表示在状态
s
s
s采取动作
a
a
a后,转移到状态
s
′
s'
s′并获得奖励
r
r
r的概率,
π
(
a
′
∣
s
′
)
\pi(a'|s')
π(a′∣s′) 表示在状态
s
′
s'
s′下选择动作
a
′
a'
a′的概率,
γ
\gamma
γ 是折扣因子。
推导如下:
下次我们将先从价值函数出发分析问题,然后通过动态规划算法解决优化问题的思路。
后续内容:
线性mpc
包括等式约束和不等式约束
非线性mpc
构建优化问题
泰勒展开线性化
KKT条件处理不等式约束
求解SQP问题
一些重要参数
预测窗口
终端项
预见性的控制(优化问题与控制效果)
SQP解决MPC的优化问题。(解一个序列控制量问题)
另一种求解思路:
HJB方程。
成本函数-状态方程——哈密顿函数
转为泛函优化问题:
变分法,分部积分,求极点的思路。
构造哈密尔顿函数
状态方程,协状态方程
控制最优条件 终值和初值条件
线性模型+二次型优化问题。
求解黎卡提方程。


















 667
667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











