







 本文围绕catkin程序包展开,介绍了其组成要求,阐述在catkin工作空间开发程序包的方法及创建工作空间的步骤。详细说明了创建catkin程序包的过程、程序包依赖关系,还讲解了如何自定义package.xml和CMakeLists.txt文件,并给出代码示例。
本文围绕catkin程序包展开,介绍了其组成要求,阐述在catkin工作空间开发程序包的方法及创建工作空间的步骤。详细说明了创建catkin程序包的过程、程序包依赖关系,还讲解了如何自定义package.xml和CMakeLists.txt文件,并给出代码示例。
目录
1. 一个catkin程序包由什么组成?
一个程序包要想称为catkin程序包必须符合以下要求:
-
该程序包必须包含catkin compliant package.xml文件
- 这个package.xml文件提供有关程序包的元信息。
-
程序包必须包含一个catkin 版本的CMakeLists.txt文件,而Catkin metapackages中必须包含一个对CMakeList.txt文件的引用。
- 每个目录下只能有一个程序包。
- 这意味着在同一个目录下不能有嵌套的或者多个程序包存在。
最简单的程序包也许看起来就像这样:
-
my_package/ CMakeLists.txt package.xml
2. 在catkin工作空间中的程序包
开发catkin程序包的一个推荐方法是使用catkin工作空间,但是你也可以单独开发(standalone)catkin 软件包。一个简单的工作空间也许看起来像这样:
-
workspace_folder/ -- WORKSPACE src/ -- SOURCE SPACE CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin package_1/ CMakeLists.txt -- CMakeLists.txt file for package_1 package.xml -- Package manifest for package_1 ... package_n/ CMakeLists.txt -- CMakeLists.txt file for package_n package.xml -- Package manifest for package_n
在继续本教程之前请先按照创建catkin工作空间教程创建一个空白的catkin工作空间。
3. 补充:创建catkin工作空间
Prerequisites
This tutorial assumes that you have installed catkin and sourced your environment. If you installed catkin via apt-get for ROS kinetic, your command would look like this:
$ source /opt/ros/kinetic/setup.bash
Let's create and build a catkin workspace:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/
$ catkin_makeThe catkin_make command is a convenience tool for working with catkin workspaces. Running it the first time in your workspace, it will create a CMakeLists.txt link in your 'src' folder. Additionally, if you look in your current directory you should now have a 'build' and 'devel' folder. Inside the 'devel' folder you can see that there are now several setup.*sh files. Sourcing any of these files will overlay this workspace on top of your environment. To understand more about this see the general catkin documentation: catkin. Before continuing source your new setup.*sh file:
$ source devel/setup.bashTo make sure your workspace is properly overlayed by the setup script, make sure ROS_PACKAGE_PATH environment variable includes the directory you're in.
$ echo $ROS_PACKAGE_PATH
/home/youruser/catkin_ws/src:/opt/ros/kinetic/share
Next you should go ahead and learn how to use the workspace.
If you are following the ROS tutorials series instead of the catkin tutorials, please continue with Creating a ROS Package.
4. 创建一个catkin程序包
本部分教程将演示如何使用catkin_create_pkg命令来创建一个新的catkin程序包以及创建之后都能做些什么。
首先切换到之前通过创建catkin工作空间教程创建的catkin工作空间中的src目录下:
# You should have created this in the Creating a Workspace Tutorial
$ cd ~/catkin_ws/src现在使用catkin_create_pkg命令来创建一个名为'beginner_tutorials'的新程序包,这个程序包依赖于std_msgs、roscpp和rospy:
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp这将会创建一个名为beginner_tutorials的文件夹,这个文件夹里面包含一个package.xml文件和一个CMakeLists.txt文件,这两个文件都已经自动包含了部分你在执行catkin_create_pkg命令时提供的信息。
catkin_create_pkg命令会要求你输入package_name,如果有需要你还可以在后面添加一些需要依赖的其它程序包:
# This is an example, do not try to run this
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]catkin_create_pkg命令也有更多的高级功能,这些功能在catkin/commands/catkin_create_pkg中有描述。
5. 程序包依赖关系
一级依赖
之前在使用catkin_create_pkg命令时提供了几个程序包作为依赖包,现在我们可以使用rospack命令工具来查看一级依赖包。
There is a bug reported and already fixed in rospack in groovy, which takes sometime until the change gets reflected on your computer. If you see a similar issue like this with the next command, you can skip to the next command.
$ rospack depends1 beginner_tutorials -
std_msgs rospy roscpp
就像你看到的,rospack列出了在运行catkin_create_pkg命令时作为参数的依赖包,这些依赖包随后保存在package.xml文件中。
$ roscd beginner_tutorials
$ cat package.xml-
<package> ... <buildtool_depend>catkin</buildtool_depend> <build_depend>roscpp</build_depend> <build_depend>rospy</build_depend> <build_depend>std_msgs</build_depend> ... </package>
间接依赖
在很多情况中,一个依赖包还会有它自己的依赖包,比如,rospy还有其它依赖包。
There is a bug reported and already fixed in rospack in groovy, which takes sometime until the change gets reflected on your computer. If you see a similar issue like this with the next command, you can skip to the next command.
$ rospack depends1 rospy-
genpy rosgraph rosgraph_msgs roslib std_msgs
一个程序包还可以有好几个间接的依赖包,幸运的是使用rospack可以递归检测出所有的依赖包。
$ rospack depends beginner_tutorials
cpp_common
rostime
roscpp_traits
roscpp_serialization
genmsg
genpy
message_runtime
rosconsole
std_msgs
rosgraph_msgs
xmlrpcpp
roscpp
rosgraph
catkin
rospack
roslib
rospy
6. 自定义你的程序包
本部分教程将剖析catkin_create_pkg命令生成的每个文件并详细描述这些文件的组成部分以及如何自定义这些文件。
自定义 package.xml
自动生成的package.xml文件应该在你的新程序包中。现在让我们一起来看看新生成的package.xml文件以及每一个需要你注意的标签元素。
描述标签
首先更新描述标签:
<description>The beginner_tutorials package</description>
将描述信息修改为任何你喜欢的内容,但是按照约定第一句话应该简短一些,因为它覆盖了程序包的范围。如果用一句话难以描述完全那就需要换行了。
维护者标签
接下来是维护者标签:
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="user@todo.todo">user</maintainer>
这是package.xml中要求填写的一个重要标签,因为它能够让其他人联系到程序包的相关人员。至少需要填写一个维护者名称,但如果有需要的话你可以添加多个。除了在标签里面填写维护者的名称外,还应该在标签的email属性中填写邮箱地址:
<maintainer email="you@yourdomain.tld">Your Name</maintainer>许可标签
再接下来是许可标签,同样的也需要:
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
你应该选择一种许可协议并将它填写到这里。一些常见的开源许可协议有BSD、MIT、Boost Software License、GPLv2、GPLv3、LGPLv2.1和LGPLv3。你可以在Open Source Initiative中阅读其中的若干个许可协议的相关信息。对于本教程我们将使用BSD协议,因为ROS核心组件的剩余部分已经使用了该协议:
<license>BSD</license>依赖项标签
接下来的标签用来描述程序包的各种依赖项,这些依赖项分为build_depend、buildtool_depend、run_depend、test_depend。关于这些标签的更详细介绍请参考Catkin Dependencies相关的文档。在之前的操作中,因为我们将 std_msgs、 roscpp、 和 rospy作为catkin_create_pkg命令的参数,所以生成的依赖项看起来如下:
<!-- The *_depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>genmsg</build_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>python-yaml</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
除了catkin中默认提供的buildtool_depend,所有我们列出的依赖包都已经被添加到build_depend标签中。在本例中,因为在编译和运行时我们需要用到所有指定的依赖包,因此还需要将每一个依赖包分别添加到run_depend标签中:
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
最后完成的 package.xml
现在看下面最后去掉了注释和未使用标签后的package.xml文件就显得更加简洁了:
<?xml version="1.0"?>
<package format="2">
<name>beginner_tutorials</name>
<version>0.1.0</version>
<description>The beginner_tutorials package</description>
<maintainer email="you@yourdomain.tld">Your Name</maintainer>
<license>BSD</license>
<url type="website">http://wiki.ros.org/beginner_tutorials</url>
<author email="you@yourdomain.tld">Jane Doe</author>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
</package>
自定义 CMakeLists.txt
到此,这个包含程序包元信息的package.xml文件已经按照需要完成了裁剪整理,现在你可以继续下面的教程了。catkin_create_pkg命令生成的CMakeLists.txt文件将在后续关于编译ROS程序代码的教程中讲述。
现在你已经创建了一个新的ROS程序包,接下来我们开始编译这个程序包
7. 代码示例
发布者节点exp_msg_pub_pub.cpp
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
/**
* This tutorial demonstrates simple sending of messages over the ROS system.
*/
int main(int argc, char *argv[])
{
/**
* The ros::init() function needs to see argc and argv so that it can perform
* any ROS arguments and name remapping that were provided at the command line.
* For programmatic remappings you can use a different version of init() which takes
* remappings directly, but for most command-line programs, passing argc and argv is
* the easiest way to do it. The third argument to init() is the name of the node.
*
* You must call one of the versions of ros::init() before using any other
* part of the ROS system.
*/
ros::init(argc, argv, "exp_msg_pub");
/**
* NodeHandle is the main access point to communications with the ROS system.
* The first NodeHandle constructed will fully initialize this node, and the last
* NodeHandle destructed will close down the node.
*/
ros::NodeHandle n;
/**
* The advertise() function is how you tell ROS that you want to
* publish on a given topic name. This invokes a call to the ROS
* master node, which keeps a registry of who is publishing and who
* is subscribing. After this advertise() call is made, the master
* node will notify anyone who is trying to subscribe to this topic name,
* and they will in turn negotiate a peer-to-peer connection with this
* node. advertise() returns a Publisher object which allows you to
* publish messages on that topic through a call to publish(). Once
* all copies of the returned Publisher object are destroyed, the topic
* will be automatically unadvertised.
*
* The second parameter to advertise() is the size of the message queue
* used for publishing messages. If messages are published more quickly
* than we can send them, the number here specifies how many messages to
* buffer up before throwing some away.
*/
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
/**
* A count of how many messages we have sent. This is used to create
* a unique string for each message.
*/
int count = 0;
while (ros::ok())
{
/**
* This is a message object. You stuff it with data, and then publish it.
*/
std_msgs::String msg;
std::stringstream ss;
ss << "hello world, I am WANG Hao " << count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
/**
* The publish() function is how you send messages. The parameter
* is the message object. The type of this object must agree with the type
* given as a template parameter to the advertise<>() call, as was done
* in the constructor above.
*/
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}订阅者节点exp_msg_pub_sub.cpp
#include "ros/ros.h"
#include "std_msgs/String.h"
/**
* This tutorial demonstrates simple receipt of messages over the ROS system.
*/
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char *argv[])
{
/**
* The ros::init() function needs to see argc and argv so that it can perform/**/
* any ROS arguments and n/**/ame remapping that were provided at the command line.
* For programmatic remappings you can use a different version of init() which takes
* remappings directly, but for most command-line programs, passing argc and argv is
* the easiest way to do it. The third argument to init() is the name of the node.
*
* You must call one of the versions of ros::init() before using any other
* part of the ROS system.
*/
ros::init(argc, argv, "exp_msg_sub");
/**
* NodeHandle is the main access point to communications with the ROS system.
* The first NodeHandle constructed will fully initialize this node, and the last
* NodeHandle destructed will close down the node.
*/
ros::NodeHandle n;
/**
* The subscribe() call is how you tell ROS that you want to receive messages
* on a given topic. This invokes a call to the ROS
* master node, which keeps a registry of who is publishing and who
* is subscribing. Messages are passed to a callback function, here
* called chatterCallback. subscribe() returns a Subscriber object that you
* must hold on to until you want to unsubscribe. When all copies of the Subscriber
* object go out of scope, this callback will automatically be unsubscribed from
* this topic.
*
* The second parameter to the subscribe() function is the size of the message
* queue. If messages are arriving faster than they are being processed, this
* is the number of messages that will be buffered up before beginning to throw
* away the oldest ones.
*/
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
/**
* ros::spin() will enter a loop, pumping callbacks. With this version, all
* callbacks will be called from within this thread (the main one). ros::spin()
* will exit when Ctrl-C is pressed, or the node is shutdown by the master.
*/
ros::spin();
return 0;
}CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(ros_msg_exp)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED
roscpp
std_msgs)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES ros_msg_exp
# CATKIN_DEPENDS other_catkin_pkg
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
include ${catkin_INCLUDE_DIRS}
# include
# ${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/ros_msg_exp.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/ros_msg_exp_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_ros_msg_exp.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
add_executable(exp_msg_pub_pub
src/exp_msg_pub_pub.cpp
)
add_dependencies(exp_msg_pub_pub ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(exp_msg_pub_pub
${catkin_LIBRARIES}
)
add_executable(exp_msg_pub_sub
src/exp_msg_pub_sub.cpp
)
add_dependencies(exp_msg_pub_sub ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(exp_msg_pub_sub
${catkin_LIBRARIES}
)package.xml
<?xml version="1.0"?>
<package format="2">
<name>ros_msg_exp</name>
<version>0.0.0</version>
<description>The ros_msg_exp package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="haowanghk@163.com">haowang</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/ros_msg_exp</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<build_depend>roscpp</build_depend> -->
<build_depend>std_msgs</build_depend> -->
<exec_depend>roscpp</exec_depend> -->
<exec_depend>std_msgs</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
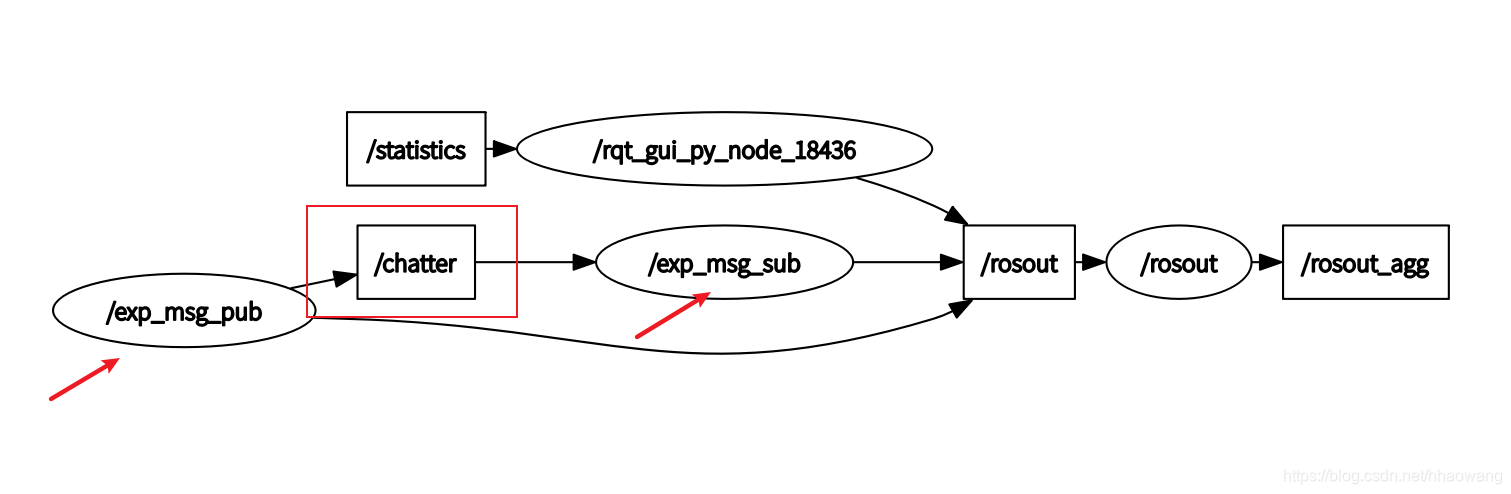
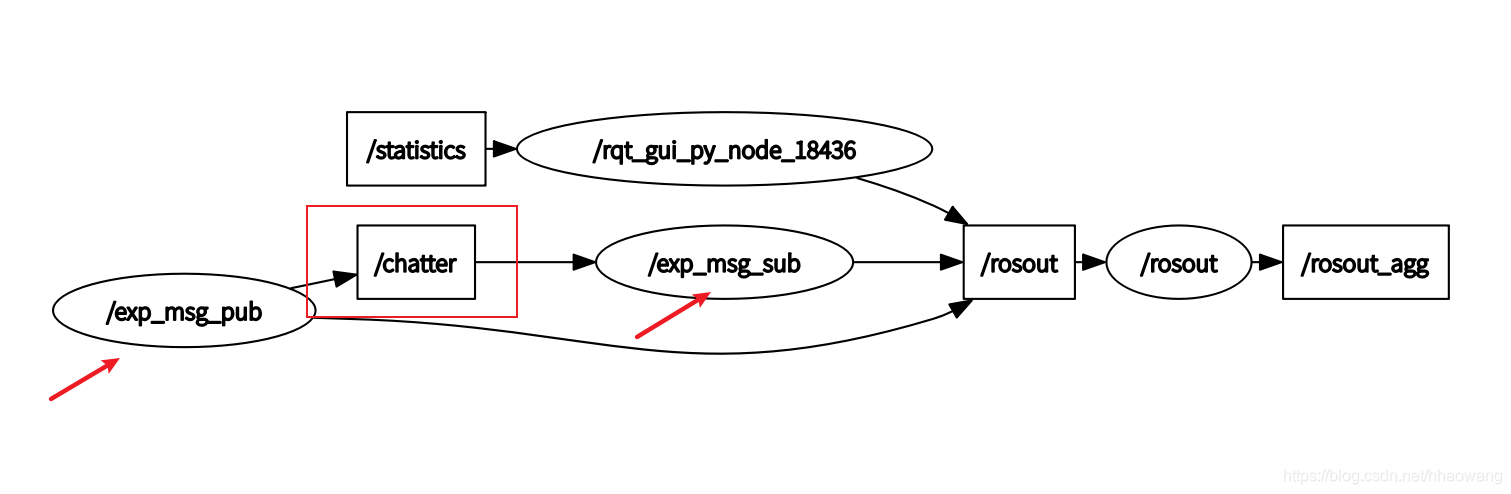
rqt_graph


















 1354
1354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











