







 超级会员免费看
超级会员免费看
 这篇博客详细介绍了如何在Ubuntu 18.04上安装ROS,管理ROS环境变量,创建catkin工作空间,并在ROS环境中构建和运行基于PCL的模块。通过安装openni软件包,创建PCL功能包,编译运行程序,以及使用Qt Creator作为集成开发环境,读者将学会如何在ROS中实现PCL点云处理的可视化。
这篇博客详细介绍了如何在Ubuntu 18.04上安装ROS,管理ROS环境变量,创建catkin工作空间,并在ROS环境中构建和运行基于PCL的模块。通过安装openni软件包,创建PCL功能包,编译运行程序,以及使用Qt Creator作为集成开发环境,读者将学会如何在ROS中实现PCL点云处理的可视化。
文章目录
一、Ubuntu上安装ROS
- 参看本博《在Ubuntu上安装ROS - 玩小海龟》,在Ubuntu18.04上安装ROS。
二、管理ROS环境变量
- 检查是否正确配置了脚本环境,执行命令:
export | grep ROS
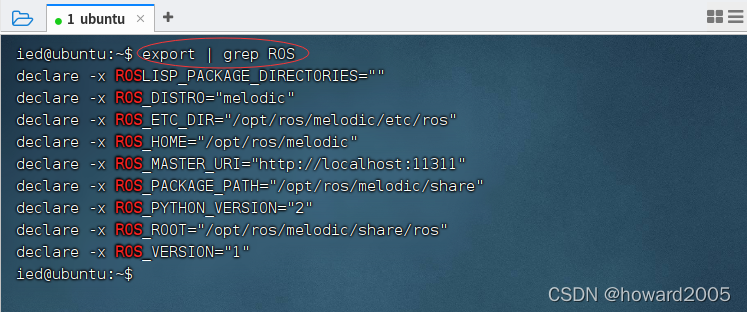
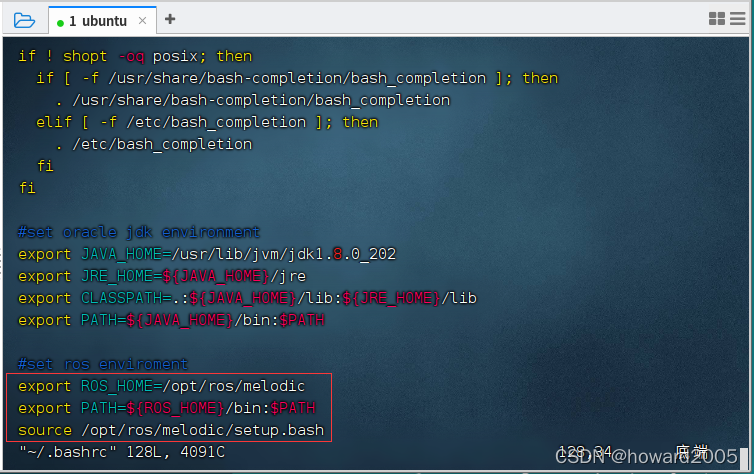
- 如果发现没有配置,那么就要配置ROS环境变量
三、创建ROS工作空间
(一)参考教程
- 网址:ht
export | grep ROS 460
2922
460
2922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























