




总述
r2live提出的框架由基于滤波方法的里程计模块和基于因子图的优化模块组成。
系统框图:
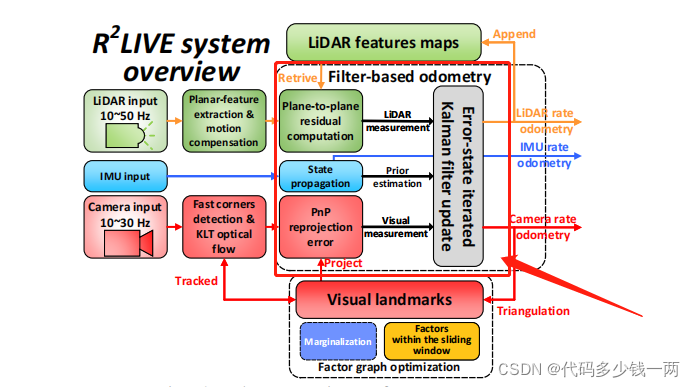
基于滤波器的里程计利用LiDAR、相机和惯性传感器的测量值,在误差状态迭代卡尔曼滤波器框架内估计状态;
为了进一步改善视觉测量,利用因子图优化来优化局部滑动窗口内的视觉路标点;
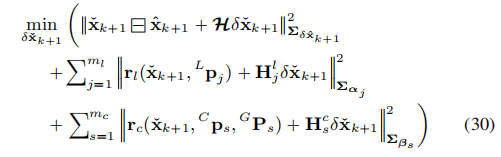
r2live框架的运动方程由IMU传播建立,观测方程由相机和雷达建立,迭代卡尔曼滤波得到的值其实就是MAP的结果,十四讲介绍过MAP就是最小化噪声的二次型,也就是马氏距离;
噪声包括三项:
- 运动方程
- lidar观测方程
- camer观测方程
运动方程得到先验,观测方程得到后验;
结合先验分布、激光雷达测量的后验分布和视觉测量的后验分布,得到了δˇxk+1的最大后验(MAP)估计,最重要的公式:
什么是运动?
从 K-1 时刻到 K 时刻,机器人的位置 X是如何变化的。
什么是观测?
假设机器人在 K 时刻,于 x_{
k 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1506
1506




 到【灌水乐园】发言
到【灌水乐园】发言







