




R3LIVE相关参考:
R3LIVE(升级R2LIVE):编译与运行https://blog.youkuaiyun.com/handily_1/article/details/122271243?spm=1001.2014.3001.5502
R3live:整体分析
https://blog.youkuaiyun.com/handily_1/article/details/122360134?spm=1001.2014.3001.5502
运行代码报错:Failed to load module “canberra-gtk-module“
https://blog.youkuaiyun.com/handily_1/article/details/122359275
R3live笔记:(图像处理)视觉-惯性里程计VIO部分
https://blog.youkuaiyun.com/handily_1/article/details/122377514
编译
编译运行R3LIVE参考文章:R3LIVE(升级R2LIVE):编译与运行
https://blog.youkuaiyun.com/handily_1/article/details/122271243?spm=1001.2014.3001.5502

1. rviz分析
简单分析一下rviz中都显示什么内容
- Global Options坐标系:world
- Grid:栅格
- Axes:Fixed Frame的坐标系,不能添加相对于其他坐标系的Axes
- LIO文件夹
pointcloud_map: 订阅的是/cloud_registered,这个就是处理后的全部点云了
current_scan:当前扫描到的全部点,订阅的也是/cloud_registered,Size是5,Alpha是1,Decay是0
feature_map:特征点地图,订阅的是/Laser_map
Path:r3live计算出来的轨迹,订阅的是/path
Odometry:/r2live/odometry 没用到
Odometry:建图的时候的位姿,订阅的是/aft_mapped_to_init
Odometry:相机位姿,订阅的是/camera_odom
Path:视觉计算出的轨迹,订阅的是/camera_path
track_pts:应该是视觉计算出的点云,跑代码的时候"/track_pts"这个话题并没有数据输出 - RGB_map文件夹
这里面全是由不同的 /RGB_map_*话题组成的一张RGB地图 - Input image:rviz显示输入图像
- Tracked points:rviz显示视觉追踪图像
2. ros节点与话题
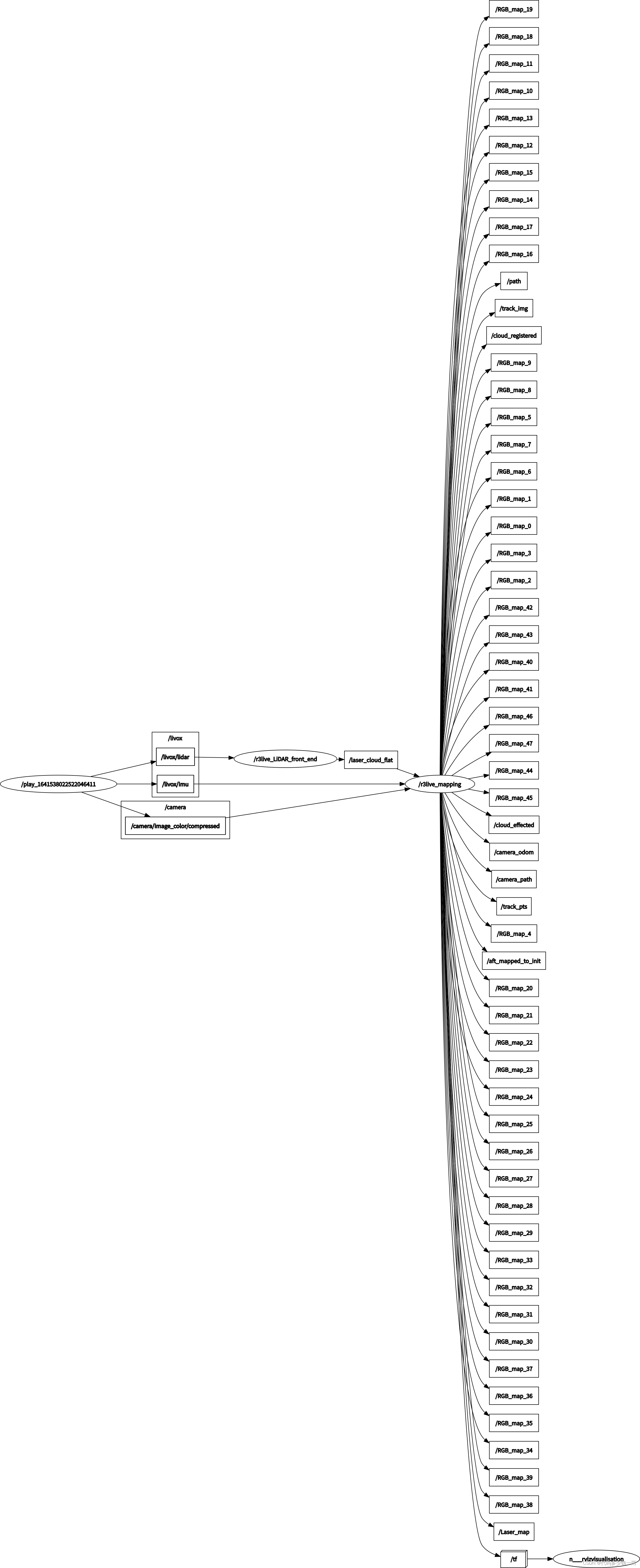
/RGB_map_*话题计较长哈,回头处理一下图片,其实r3live节点与话题和还是很清晰明了的, 一共就/r3live_LiDAR_front_end和/r3live_mapping两个节点:
/r3live_LiDAR_front_end节点算法来自于经典算法LOAM中的特征提取部分,其实也是R2live、fast-lio中都使用到的,他订阅/livox/lidar雷达话题信息,经过处理后发布点云/laser_cloud,平面点/laser_cloud_flat和角点/laser_cloud_sharp信息。
/r3live_mapping节点就订阅平面点/laser_cloud_flat、imu话题/livox/imu和相机(这里的图片是compressed格式)话题/camera/image_color/compressed。发布的话题是前面rviz订阅的所有。
3. launch文件分析
以r3live_bag.launch为例:
<launch>
<!-- Subscribed topics -->
<param name="LiDAR_pointcloud_topic" type="string" value= "/laser_cloud_flat" />
<param name="IMU_topic" type="string" value= "/livox/imu" />
<param name="Image_topic" type="string" value= "/camera/image_color" />
<param name="r3live_common/map_output_dir" type="string" value="$(find r3live)/../r3live_output" />
<rosparam command="load" file="$(find r3live)/../config/r3live_config_r3live.yaml" />
<node pkg="r3live" type="r3live_LiDAR_front_end" name="r3live_LiDAR_front_end" output="screen" required="true">
<remap from="/livox/lidar" to="/livox/lidar" />
</node>
<node pkg="r3live" type="r3live_mapping" name="r3live_mapping" output="screen" required="true" />
<arg name="rviz" default="1" />
<group if="$(arg rviz)">
<node name="rvizvisualisation" pkg="rviz" type="rviz" output="log" args="-d $(find r3live)/.. 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5187
5187











 到【灌水乐园】发言
到【灌水乐园】发言







