




R2LIVE代码学习记录(2):r2live包
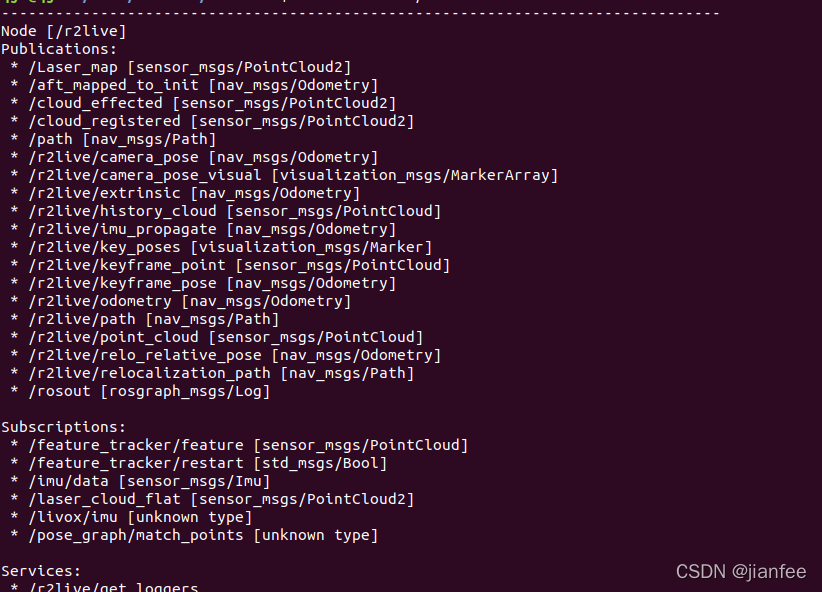
r2live节点分析: 运行代码新开一个终端输入: rosnode info /r2live
查看r2live节点,可以看到人r2live节点订阅和发布的话题有
订阅的是经过特征点提取的平面点/laser_cloud_flat话题、视觉跟踪/feature_tracker/feature话题、视觉/feature_tracker/restart话题以及imu信息/livox/imu。
1. CMakeLists.txt
add_executable(lio_feat_extract src/fast_lio/feature_extract.cpp)
target_link_libraries(lio_feat_extract ${
catkin_LIBRARIES 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2877
2877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









