







文章目录
第1部分 产品介绍
MKS SERVO42E/57E 闭环步进电机是创客基地为满足市场需求,按工业级标准自主研发的一款产品。具备脉冲接口、RS485接口以及CAN接口,内置高效FOC矢量算法,采用高精度编码器,通过位置反馈,有效防止电机丢步。适合小型机械臂,3D打印机,雕刻机,写字机,非标自动化产品以及电子竞赛等应用。

第2部分 MODBUS-RTU指令说明
注1:需要开启MODBUS-RTU通讯协议,使用串行指令“8E”设置
注2:从站地址默认为01H
注3:默认串行数据格式为“38400,8N1”
注4:使用7.3节 1046H,1147H,1248H寄存器地址可配置/读取所有参数
2.1 读取参数指令
1.读取进位制多圈编码器值
注:编码器单圈值范围 0~0x4000
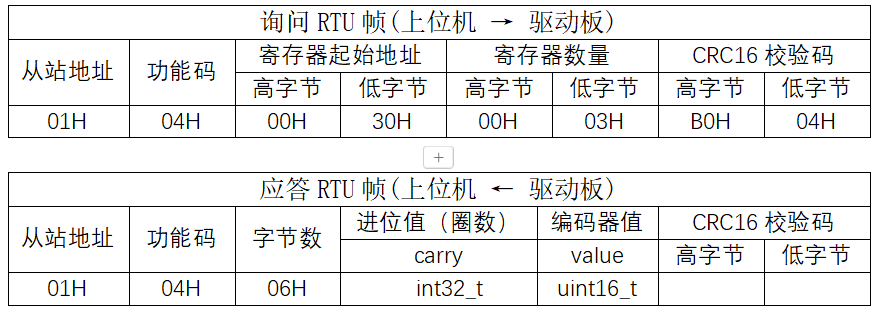
记录上电后(使能或不使能),编码器记录的电机转动范围。
value记录当前编码器值,范围为00x4000,表示0360°。
carry记录编码器进位值,即圈数。
进位规则:当value大于0x4000,carry加1
当value小于0,carry减1
例如:
当前编码器值为0x3FF0,正转一圈后(+0x4000),carry=1,value= 3FF0H
当前编码器值为0x3FF0,反转一圈后(-0x4000),carry=-1,value= 3FF0H
示例见“00_F4(30)读取编码器值(进位制).mbp”
2.读取累加制多圈编码器值
注:编码器单圈值范围 0~0x4000
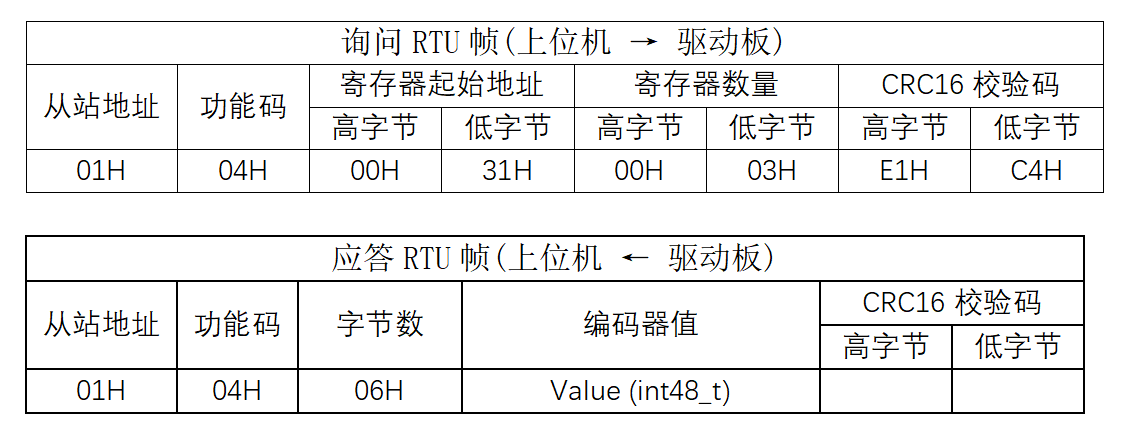
记录上电后(使能或不使能),编码器记录的电机转动范围。
累加规则: 正转一圈,多圈编码器值 +0x4000;
反转一圈,多圈编码器值 -0x4000;
例如:
当前编码器值为0x3FF0,正转一圈后(+0x4000),多圈编码器值为0x000000007FF0。
当前编码器值为0x3FF0,反转一圈后(-0x4000),多圈编码器值为0xFFFFFFFFFFF0。
注:按坐标值相对/绝对运动时,使用该编码器值作为坐标。
示例见“01_F4(31)读取编码器值(累加制).mbp”
3.读取电机实时转速
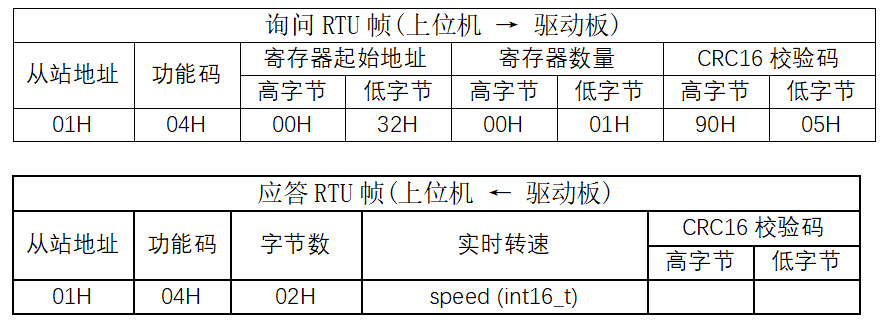
注:转速单位为RPM, 正转时转速大于0,反转时转速小于0。
示例见“02_F4(32)读取实时转速.mbp”
4.读取输入累计脉冲数
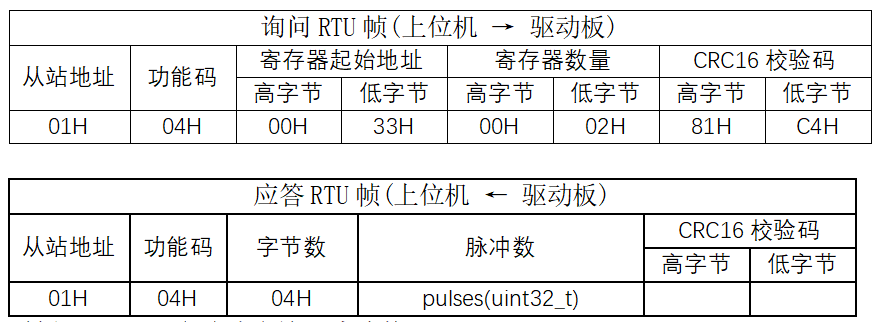
示例见“03_F4(33)读取输入脉冲数.mbp”
5.读取IO端口状态
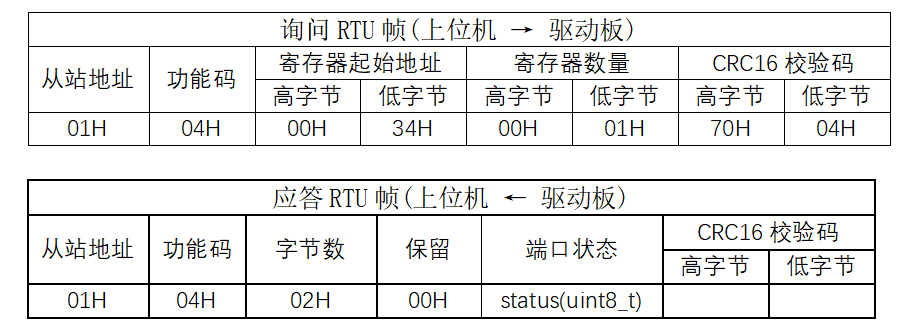

注:限位重映射功能有效后,bit0对应En状态,bit1对应Dir状态。
6.读取位置角度误差
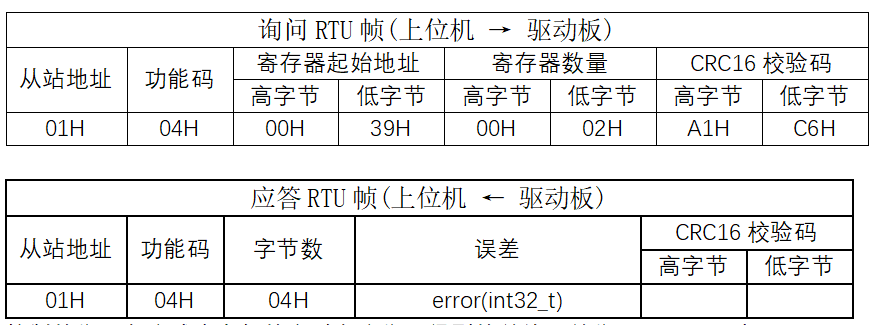
控制的位置角度减去电机的实时角度位置得到的差值,单位:051200表示0360°,比如误差为1°时,数值为51200/360°= 142.22,以此类推。
示例见“04_F4(39)读取角度误差.mbp”
7.读取使能状态
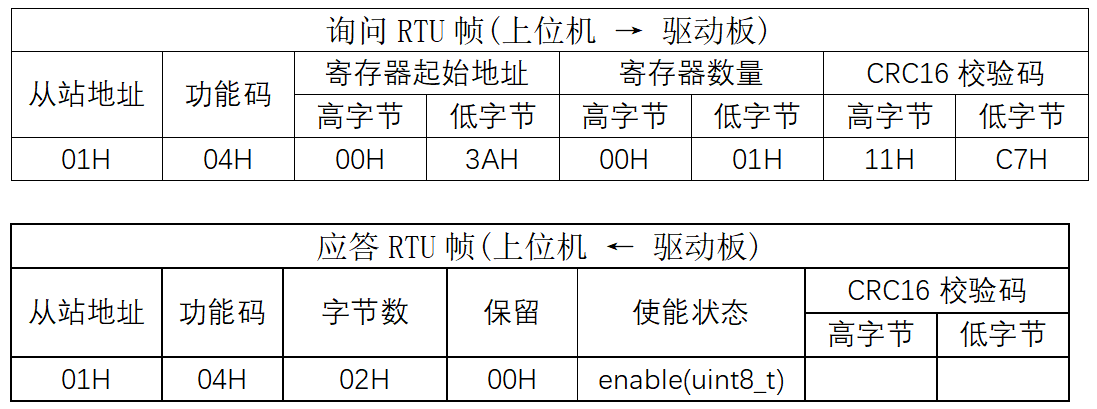
示例见“05_F4(3A)读取使能状态.mbp”
8.读取堵转状态
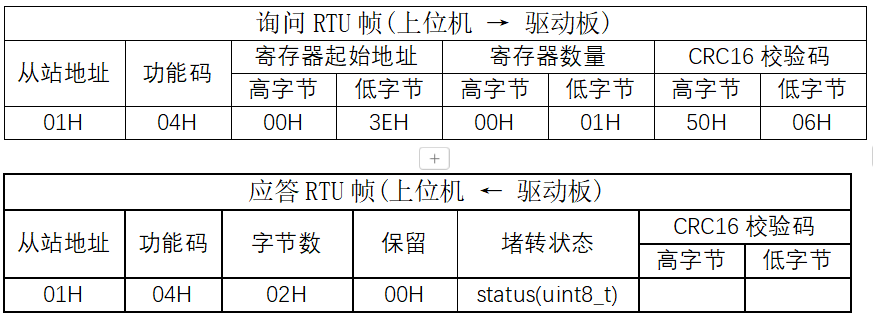
status =0 未堵转.
status =1 已堵转.
示例见“07_F4(3E)读取堵转状态.mbp”
9.读取版本信息
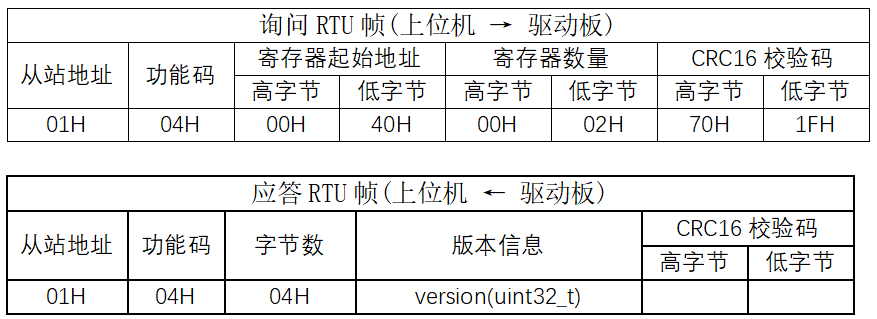
示例见“08_F4(40)读取版本信息.mbp”
10.读取电机状态
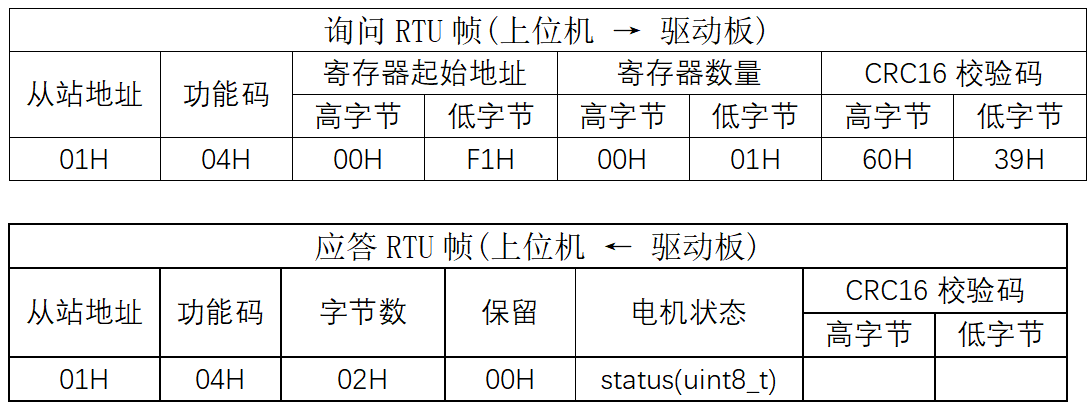
status = 0 查询失败
status = 1 电机停止运行
status = 2 电机加速运行
status = 3 电机减速运行
status = 4 电机全速运行
status = 5 电机归零运行
status = 6 电机校准运行
示例见“09_F4(F1)读取电机状态.mbp”
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 897
897

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









