



 本文探讨了两种实现环绕拍摄的方法:欧拉角旋转与lookat方案,并详细解析了lookat方案的具体实现步骤及代码示例。
本文探讨了两种实现环绕拍摄的方法:欧拉角旋转与lookat方案,并详细解析了lookat方案的具体实现步骤及代码示例。
求对着目标物体环绕拍摄的相机参数lookAt
求对着目标物体环绕拍摄的相机参数lookAt
目标
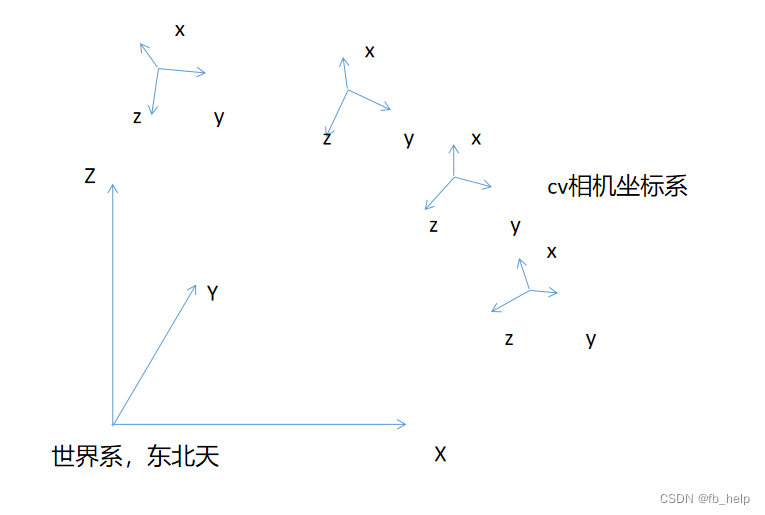
在物方原点处存在一个目标,我们希望获得围绕目标的“观看”的相机pose,从而渲染目标
第一个想法:旋转坐标系(欧拉角旋转)
目标是将世界系变换到相机系
通过旋转世界坐标系,让它变到相机坐标系,记录下该过程的变换矩阵M。
我的想法:
相机原点的经纬度可以通过角度计算出来,将世界系(0,0,1)根据经纬度的计算的欧拉角对坐标系进行旋转变换
最终这个方案失败了
有几点我没弄清楚:
- 这个旋转过程是需要内旋还是外旋
- 这个旋转过程需要旋转哪些轴,以及哪些轴需要旋转多少度(实验中是先旋转Z轴经度,再旋转y轴纬度)
- 每一次旋转记录的旋转矩阵到底是world2camera还是camer2world
- 欧拉角的24种旋转方法搞不懂
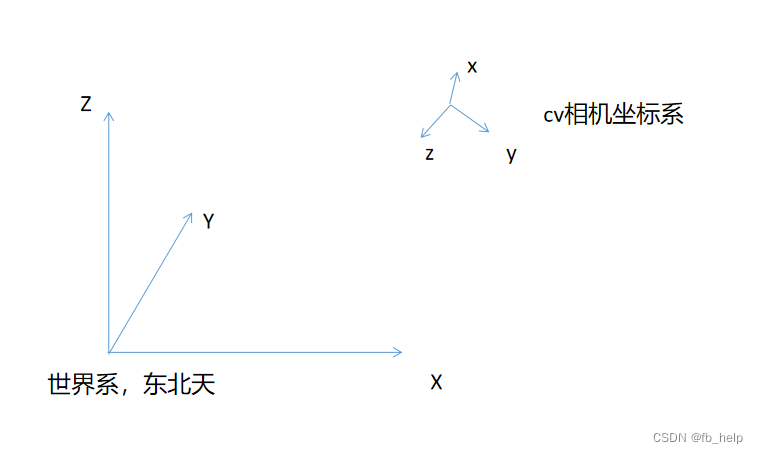
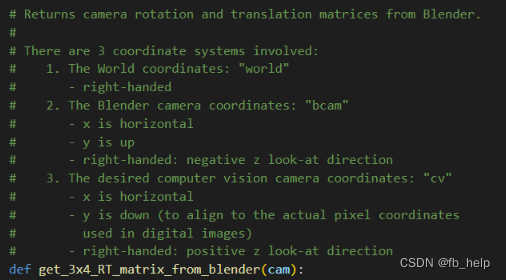
- 欧拉角广泛应用于图像学的渲染领域,参考opengl的教程得到的是图形学的相机,最后还需要转换到cv相机(与cv相机z朝外,y朝下不同,图像学相机z朝里,y朝上)(它们之间的转换见下图)
- 这个过程中的耦合度太高,不宜检查出出错的地方。
因此,这种方案我放弃了,改用了lookat方案
第二个想法:lookat方案(或者称为矩阵分析方案)
环绕拍摄有一个特点,相机一定朝向原点。我们基于这个约束可以对矩阵进行分析,最终求得需要的变换矩阵。
重点 矩阵分析:
对于world2camera的变换矩阵M(4*4) 它满足这些条件: 对于相机坐标系的o_cam(0,0,0,1),M@o_cam
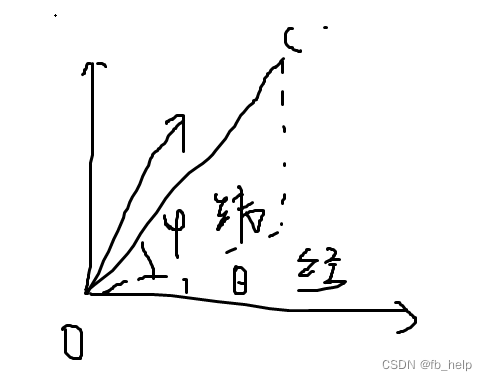
=M[:3,3] = 相机在世界系下的坐标。 对于相机坐标系的Z轴(0,0,1,1) M@Z = M[:3,2] = 相机Z轴在世界系下的方向向量。(对于lookat来说,就是相机原点到物方原点的单位向量) 对于相机坐标系的X轴(1,0,0,1)
M@X = M[:3,0] =
相机X轴在世界系下的方向向量。(对于环绕拍摄来说,x轴一定在x0y平面上,且其t在x0y上的投影与x轴的夹角为经度+90)
对于相机坐标系的Y轴(1,0,0,1) M@Y = M[:3,1] 由于XYZ三轴垂直,因此Y = coss(Z,X) 注意这里是右手系,Z到X才为Y轴
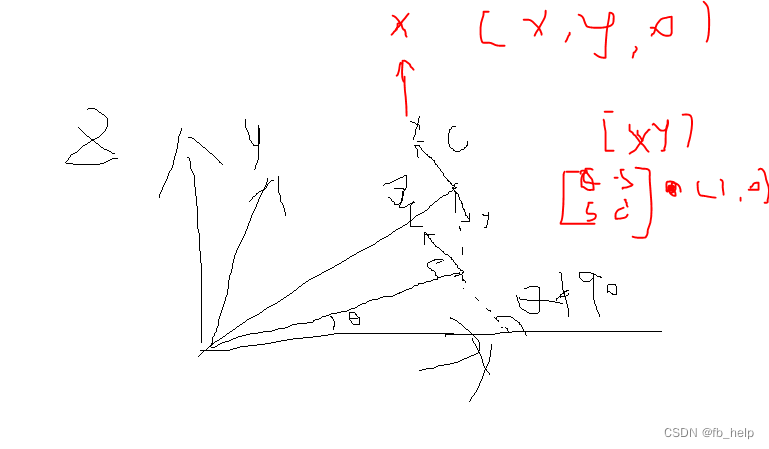
我们发现经过矩阵分析后,矩阵M的前三行都可以根据实际Z轴和X轴的朝向而计算出来。
我们的变换矩阵被填充完了。即完成了变换。最终获得camera2world的变化矩阵M
代码:
def pose_look_at_q(jingdu, weidu, radius): #经度纬度半径
# 计算相机Z轴在世界系下向量的坐标
jingdu = jingdu/180.*np.pi
weidu = weidu/180.*np.pi
x = radius*math.sin(weidu)*math.cos(jingdu)
y = radius*math.sin(weidu)*math.sin(jingdu)
z = radius*math.cos(weidu)
Z = -np.array([x,y,z]) #注意这里要取负号,相机z轴在世界系下的方向向量,是C到O
# 计算相机X轴在世界系下向量坐标
x_world_2d_ori = np.array([1,0])
jingdu_X = jingdu+0.5*np.pi
transform = np.array([
[np.cos(jingdu_X),-np.sin(jingdu_X)],
[np.sin(jingdu_X), np.cos(jingdu_X)]
])
x_world_2d_cam = transform@x_world_2d_ori
X = np.array([x_world_2d_cam[0],x_world_2d_cam[1],0]) #这里乘的顺序
# 计算相机Y轴在世界系下坐标 叉乘的顺序
Z = Z/ np.linalg.norm(Z) #归一化
Y = np.cross(Z,X) #叉乘的顺序,右手法则
#print(np.linalg.norm(Z))
#print(np.linalg.norm(X))
#print(np.linalg.norm(Y))
Y = Y/ np.linalg.norm(Y)
#print(np.array([x,y,z])+Y)
# c2W
P = np.array([
[1,0,0,0],
[0,1,0,0],
[0,0,1,0],
[0,0,0,1.]])
P[:3,0] = X
P[:3,1] = Y
P[:3,2] = Z
P[:3,3] = [x,y,z]
P = torch.Tensor(np.array([[1,0,0,0],[0,1,0,0],[0,0,1,0],[0,0,0,1]])) @ P
return P
render_poses = torch.stack([pose_look_at_q(angle, 30, 1) for angle in np.linspace(0,360,25)[:-1]], 0)
举一反三
如果并不想对着原点环绕拍摄,而是想对着[x,y,z]环绕拍摄。
那么先按照上述方法对着原点拍摄, 即 camera2ori, 再 ori2obj。则M(camera2obj)= M(camera2ori)*M(ori2obj)
一些其它材料
pose 对不对的检查方法
如果w2c的矩阵最后一列不是0,0,r就是错误的,因为位置一般都是对的,如果再相机主光轴朝向原点,那姿态也对了
w2c的最后一列是不是0,0,R
c2w的最后一列是不是相机中心在世界系下坐标即C
https://blog.youkuaiyun.com/xinxiangwangzhi_/article/details/124650910
旋转的方法的一个问题:乘以了一个矩阵后,不知道是向量变化了还是基底变化了。
https://blog.youkuaiyun.com/weixin_45632220/article/details/117735223?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166459883816782425196130%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=166459883816782425196130&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2alltop_positive~default-1-117735223-null-null.142v51control,201v3control_1&utm_term=%E6%97%8B%E8%BD%AC%E7%9F%A9%E9%98%B5&spm=1018.2226.3001.4187

















 3148
3148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









