



去Deepseek提问弄到的简单案例,当入门理解感觉还挺合适,写在这里当个记录。
问题描述
假设我们控制一辆汽车,使其以设定的速度巡航。驾驶员设定了一个期望速度vrefv_{ref}vref。我们的任务是设计一个MPC控制器,通过调节油门/刹车(控制输入 uuu),使汽车的实际速度vvv尽可能平稳且准确地跟踪vrefv_{ref}vref ,同时要满足约束:油门和刹车不能无限大,即umin≤u≤umaxu_{min} \leq u \leq u_{max}umin≤u≤umax。
第一步:建立预测模型
首先,我们需要一个能够描述汽车速度如何响应油门/刹车的数学模型。我们使用一个非常简化的模型。
根据牛顿第二定律,假设车辆在平直路面上行驶,忽略风阻和滚动阻力,有:

这是一个连续时间的微分方程。为了在数字控制器中实现,我们需要将其离散化。
采用前向欧拉法,采样时间为TsT_sTs:
其中 k 表示第 k 个采样时刻。
整理得到我们的离散时间状态空间模型:

我们定义状态变量x(k)=v(k)x(k)=v(k)x(k)=v(k)。由于系统只有一个状态(速度),所以这是一个一阶系统。输出变量 y(k)=v(k)y(k)=v(k)y(k)=v(k)(我们测量速度)。
所以预测模型为:
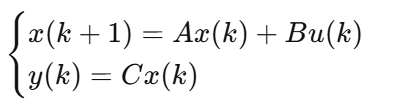

这个模型将用于预测未来时刻的系统状态。
第二步:定义优化问题
这是MPC的核心。在每个时刻 k,我们都要解决一个优化问题。
1. 预测时域
我们定义预测时域为 N。这意味着在时刻 k,我们将预测从 k 到 k + N 的未来状态。
2. 代价函数
我们希望速度跟踪准确,同时控制动作不要过于剧烈。因此,我们定义一个经典的二次型代价函数:

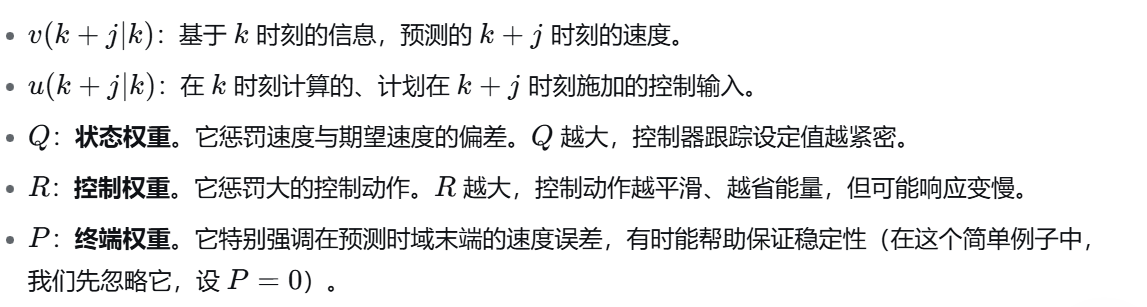
(笔者注:这里P、Q、R一般来说应该是正定矩阵,然后代价函数是二次型矩阵相乘的形式,这里因为是简单例子退化为标量)
为了简化,我们设 P=0,代价函数简化为:

3. 约束
在我们的问题中,只有控制输入约束:

第三步:推导预测方程(核心推导)
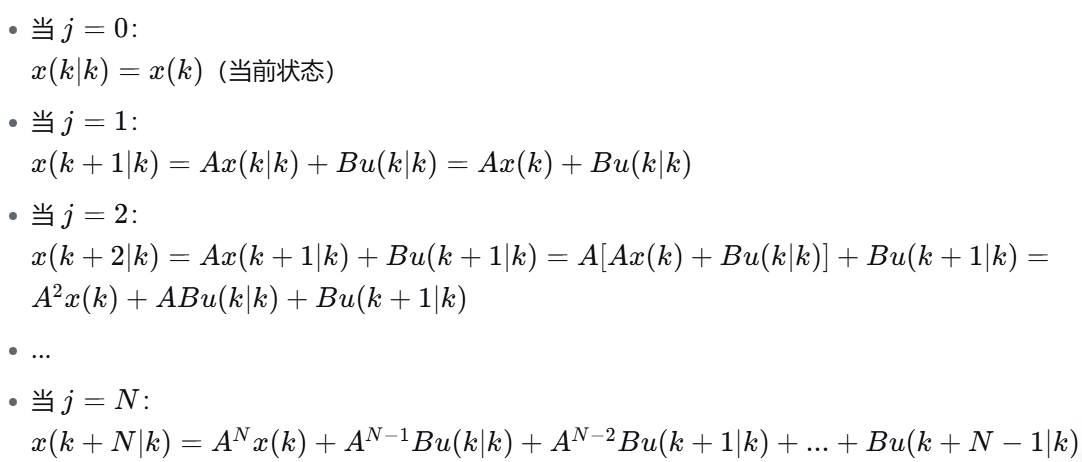
为了求解上面的优化问题,我们需要将代价函数 JJJ 中的未来状态 v(k+j∣k)v(k+j∣k)v(k+j∣k)用当前状态 v(k)v(k)v(k) 和未来的控制输入 u(k∣k),u(k+1∣k),...u(k∣k),u(k+1∣k),...u(k∣k),u(k+1∣k),... 来表示。
我们从模型 x(k+1)=Ax(k)+Bu(k)x(k+1)=Ax(k)+Bu(k)x(k+1)=Ax(k)+Bu(k) 出发,进行迭代:
由于在我们的例子中 A=1A=1A=1, B=TsB=T_sB=Ts,这些方程大大简化了:
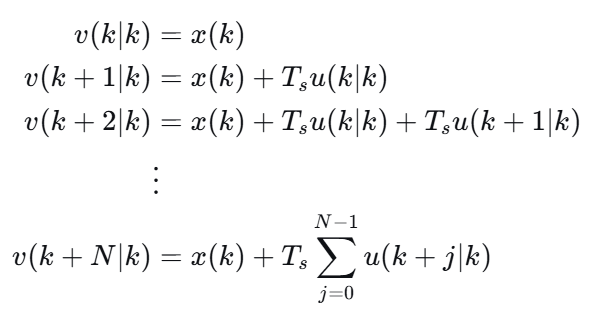
(笔者注:这里AI把表示状态的字母变量xxx和vvv混用了,应该统一一下比较好)
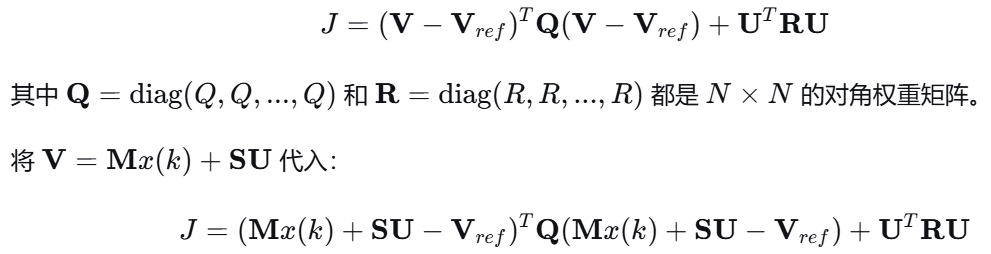
现在,我们可以将代价函数 J 完全表示为关于当前状态 x(k)x(k)x(k) 和控制序列 U=[u(k∣k),u(k+1∣k),...,u(k+N−1∣k)]T{U=[u(k∣k),u(k+1∣k),...,u(k+N−1∣k)]}^TU=[u(k∣k),u(k+1∣k),...,u(k+N−1∣k)]T的函数。
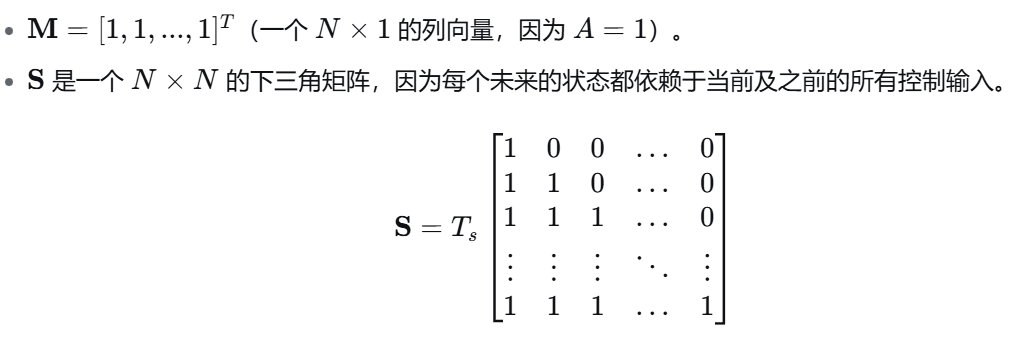
定义向量:

(笔者注:这里应该是简化模型把参考速度轨迹弄成定值了)
根据上面的预测方程,我们可以写出:

(笔者注:x(k)x(k)x(k)即当前状态v(k)v(k)v(k))
其中:
现在,代价函数可以写成向量形式:
第四步:求解优化问题并应用
上面的代价函数 JJJ 是关于 UUU 的二次函数,约束是 UUU 的上下限(箱型约束)。
这是一个二次规划问题。在每一个控制周期 kkk:
1、测量或估计当前速度 v(k)v(k)v(k)。
2、求解如下QP问题:

(笔者注:后面笔者有时间再去研究一下QP问题的求解,另外再发一篇笔记)
3、求解器会返回最优的控制序列U∗=[u∗(k∣k),u∗(k+1∣k),...,u∗(k+N−1∣k)]{\bm U}^∗=[u^∗(k∣k),u^∗(k+1∣k),...,u^∗(k+N−1∣k)]U∗=[u∗(k∣k),u∗(k+1∣k),...,u∗(k+N−1∣k)]。
4、MPC控制器只取这个序列的第一个元素 u∗(k∣k)u^∗(k∣k)u∗(k∣k) 作为实际的控制输入u(k)u(k)u(k)施加给汽车。
5、到下一个采样时刻 k+1k+1k+1,重复整个过程(测量x(k+1)x(k+1)x(k+1),重新求解优化问题)。
总结与直观理解

















 4281
4281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









