



前言
原论文标题:《Three-Dimensional Velocity Obstacle Method for Uncoordinated Avoidance Maneuvers of Unmanned Aerial Vehicles》,论文标题太长,没法放到这篇文章的标题上。
DOI:10.2514/1.g001715
这篇论文是笔者读研的时候曾经引用过的论文,也尝试复现过它的方法。最近求职的时候需要复盘自己以前做过的课题,所以把论文中的方法放到笔记里做个记录。
三维速度障碍法(Three-Dimensional Velocity Obstacle,3DVO)的基础是速度障碍法(Velocity Obstacle,VO),VO是一种经典的底层避障算法,具体原理这篇文章介绍得比较好:
https://zhuanlan.zhihu.com/p/662684761
3DVO除了把VO拓展到三维空间,还增加了许多细节的设计,下面章节介绍3DVO的具体实现。
论文中的一些相关的数学概念
碰撞锥
3DVO算法的背景是无人机避障,所以引入了保护区(protected zone)的概念,说白了就是以移动障碍物为中心,半径为rpzr_{pz}rpz的一个球体,双方距离小于该球体半径,视为碰撞:
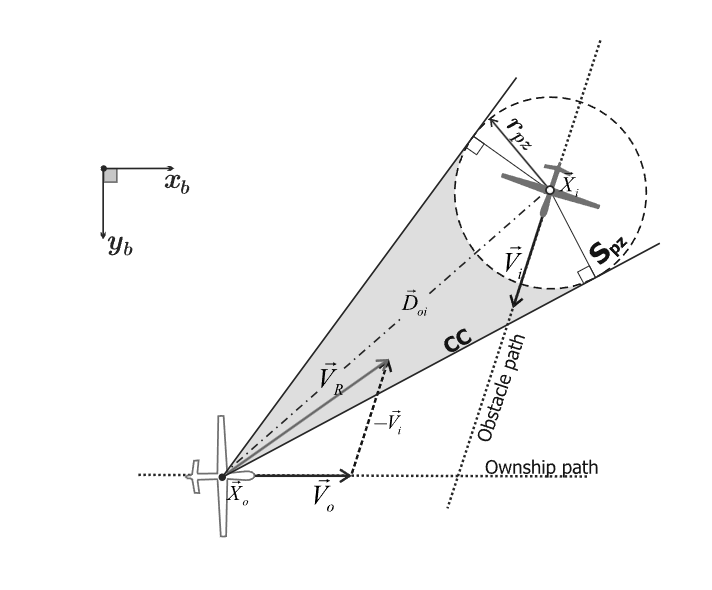
位于坐标XoX_oXo处的无人机为己方(owner)操控的无人机,位于坐标XiX_iXi处的无人机为移动障碍物,且双方无任何通信或合作关系(说白了,把移动障碍物当傻子,移动障碍物行为不可预测)。和VO算法类似,3DVO中只要XoX_oXo相对于XiX_iXi的速度VRV_RVR的延长线经过保护区,则有碰撞危险(前提是双方一直保持速度不变),延长线经过球形保护区的速度矢量集合组成一个锥体(见上图),称为碰撞锥(Collision Cone,CC)。
VO集
碰撞锥是相对速度VRV_RVR的危险集合,但我们的研究对象是己方无人机避障,需要的是己方无人机绝对速度VoV_oVo的危险集合。己方无人机绝对速度VoV_oVo的危险集合就是所谓的VO集(velocity obstacle set,VO set)。VO集的获取很简单,直接将碰撞锥的顶点沿移动障碍物的速度矢量平移即可(数学表达和经典的速度障碍法类似,可翻阅上面贴的相关文章):
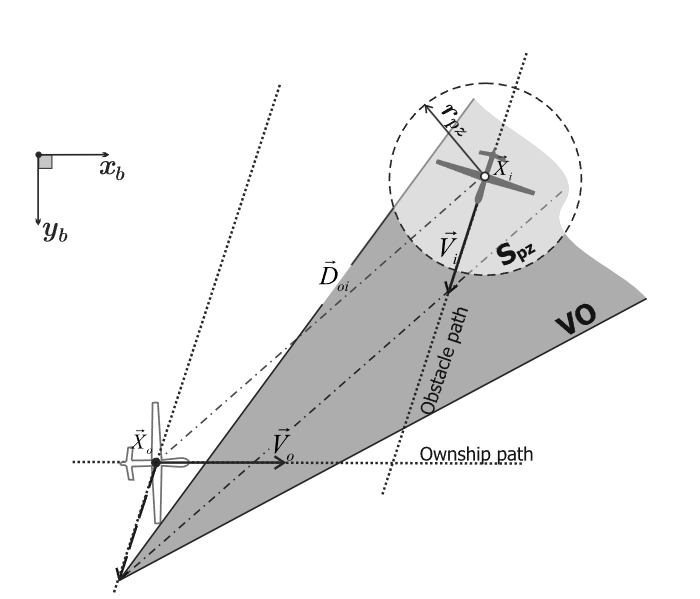
当己方无人机绝对速度VoV_oVo的终点在VO集里面时,意味着有碰撞危险,需要避障。
VO集只和两者的相对位置以及移动障碍物的绝对速度有关,和己方无人机的绝对速度无关。
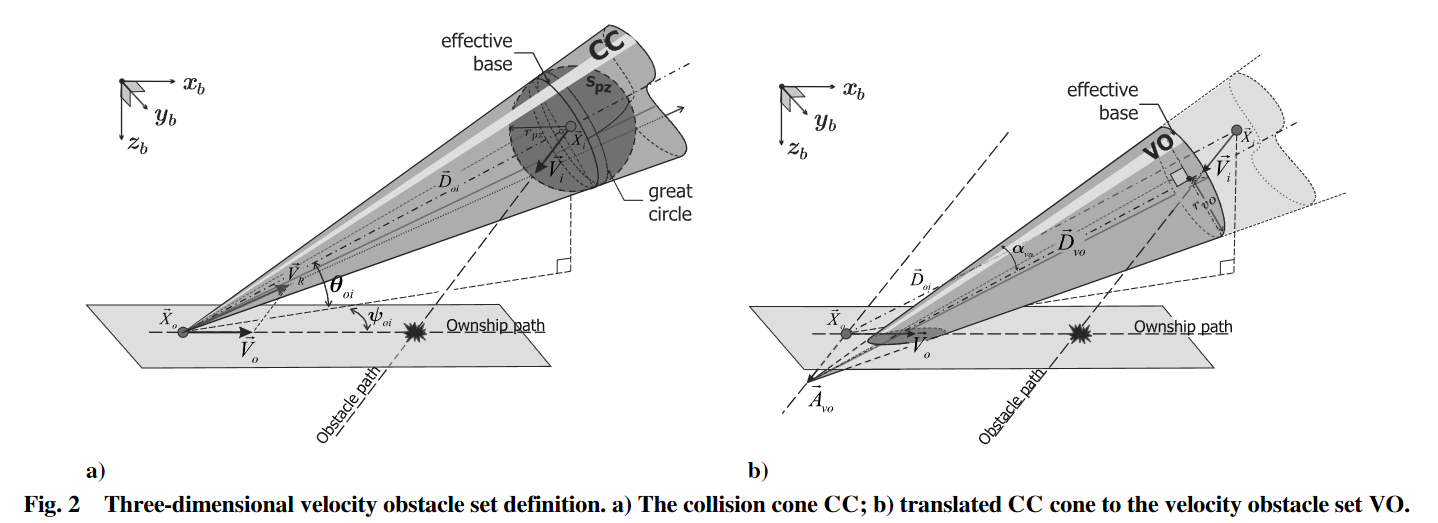
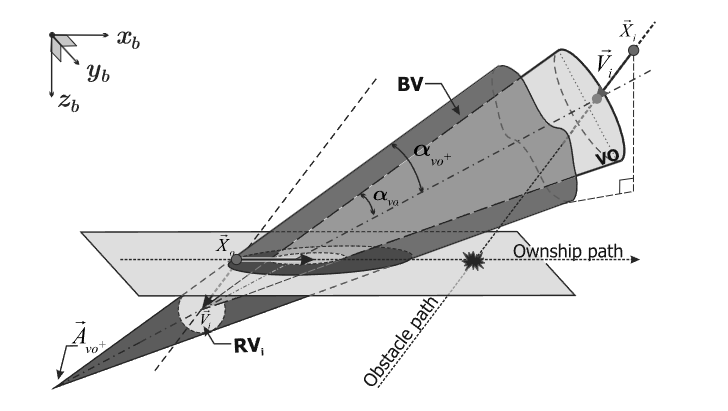
画成三维形式:
带缓冲区的速度集(The Buffer Velocity Set)
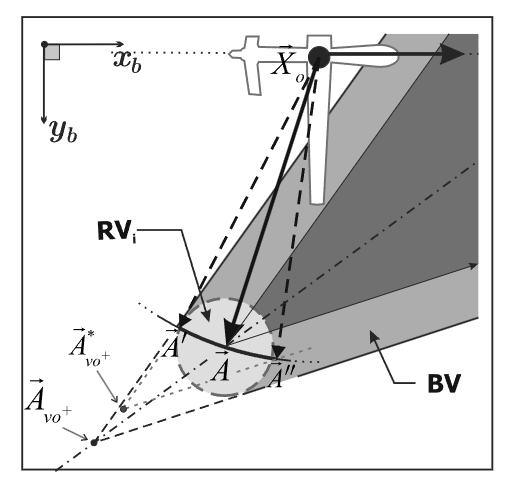
论文中考虑了移动障碍物并非匀速直线运动,而是存在一定的机动性的情况。文中假设障碍物的速度矢量ViV_iVi在一个时间步内会发生一定范围内的方向变化(大小不变),该范围内的所有ViV_iVi的终点会构成一个圆弧(见下图),称为RViRV_iRVi集。
把原来的VO集沿着对称线往锥体的顶点方向平移,直到把圆弧都包进锥体中,得到一个新的集合VO+,由原来的VO集和外层包裹的缓冲区BV集组成,见下图:
避障平面
这个设计个人觉得比较有意思,目的是让己方的飞行器仅在某个二维平面完成避障,把三维的避障问题简化为二维。
既然是在二维平面完成避障,那么己方的飞行器和其绝对速度VoV_oVo必然在该平面上,这样的平面理论上可以画出无数个,它们全都经过己方的飞行器和其绝对速度VoV_oVo矢量,如下图所示:
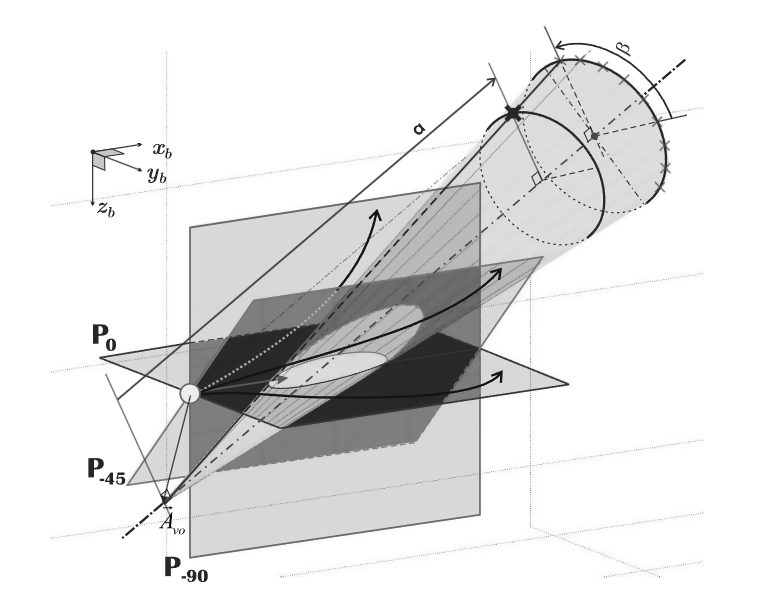
每个避障平面都可以经由某个基准平面绕VoV_oVo旋转angle°得到,用PangleP_{angle}Pangle来区分这些平面,其中P0P_{0}P0为基准平面(笔者注:这里论文作者没有说明基准平面的设置方法,笔者复现时把与航迹坐标系的XOY平面平行,且经过VoV_oVo的平面设为了基准平面)。
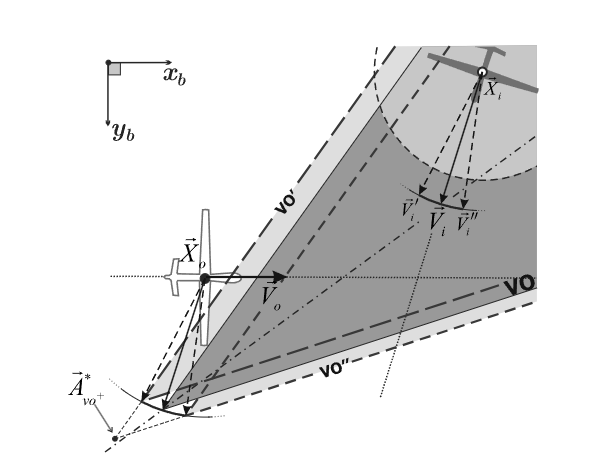
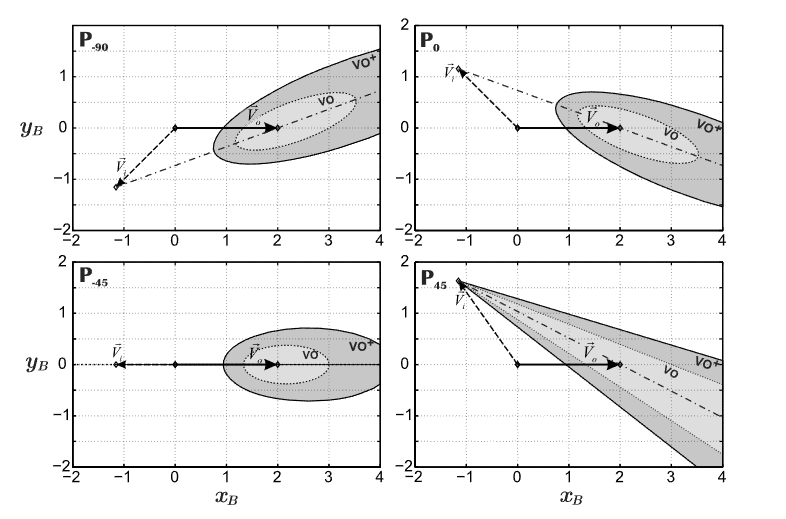
论文中根据旋转角度分了12个平面,根据高中数学,每个平面都可能和VO集相交形成圆锥曲线,或退化形式比如没有底的三角形、射线、点等。此时在二维平面上避障问题的VO集可能不再是圆锥或者三角形,而是圆锥曲线形状,如下图所示:
3DVO避障流程
三种模式
3DVO 包括三种模式:避障模式(Avoid Mode)、保持模式(Maintain Mode)、
任务模式(Mission Mode),其模式切换根据飞行器速度 𝒗 是否处于 VO 集,以及
飞行器与障碍物之间的距离来决定。
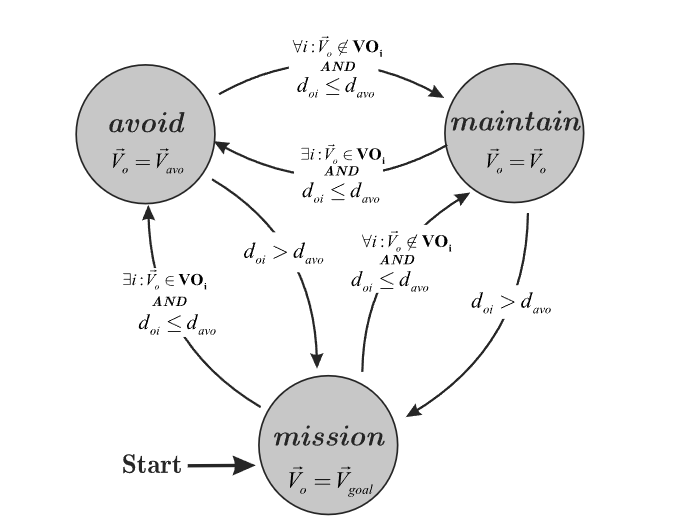
(1)如果己方无人机的速度矢量包含在 VO 集中,并且己方无人机与障碍物之间
的距离小于避障距离davod_{avo}davo(可以理解为己方无人机的感知距离),则 3DVO 将处于避障模式。在避障模式中,3DVO将基于避障平面和 VO 集确定避障速度矢量,然后使己方无人机以该避障速度矢量飞行。
(2)如果己方无人机与障碍物之间的距离小于避障距离,但己方无人机的速度矢量不包含在 VO 集中,则 3DVO 将处于保持模式。在保持模式下,3DVO 将使己方无人机以当前速度矢量匀速直线飞行。
(3)如果己方无人机与障碍物之间的距离大于飞行器的感知范围,则 3DVO 将处于任务模式。在任务模式中,3DVO 将引导己方无人机维持或恢复其原来的海拔、航线和空速。
避障面选择
在避障模式中,3DVO算法会构建VO集以及12个避障平面,在这些避障平面中需要选择一个来进行避障。选择避障平面的时候会先排除掉平面上的VO集为三角形和双曲线形的,前者是因为VoV_oVo和ViV_iVi都在避障平面上,导致避障难度上升,后者没太看懂作者的意思,猜测是双曲线形碰撞锥选择的余地小,或者是虽然避免了共面但还是比较接近共面。
排除掉上面的避障平面后,接下来比较避障时的速度转向需求,选择最佳的避障平面。速度转向需求由可达速度EvoE_{vo}Evo与当前速度VoV_oVo的夹角来决定。可达速度可通过以当前速度VoV_oVo的模为半径,飞行器所在位置为圆心的圆与平面上的VO集边缘之间的交点来选择,在多个Evo−xE_{vo-x}Evo−x中选择具有最小夹角的速度矢量作为可达速度,该最小夹角便可以用于衡量所在避障面转向需求,如下图所示。
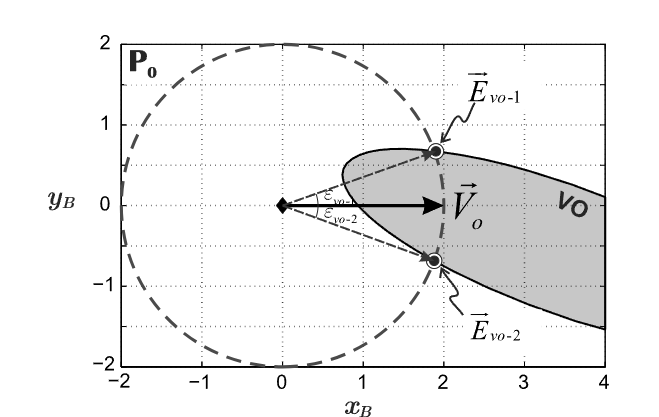
夹角最小的避障平面,即为最佳的避障平面。
避障速度的计算
选好避障面,就可以计算避障速度了。
选定好最佳的避障平面之后,无人机将根据选定的EvoE_{vo}Evo,提供一条以特定角速
率ωavo\omega_{avo}ωavo进行纯转弯的避障路线,直到速度矢量VoV_oVo与EvoE_{vo}Evo重合。
说白了,就是让速度矢量VoV_oVo匀速转向,己方无人机以ωavo\omega_{avo}ωavo转弯但保持速度大小不变,如下图所示。
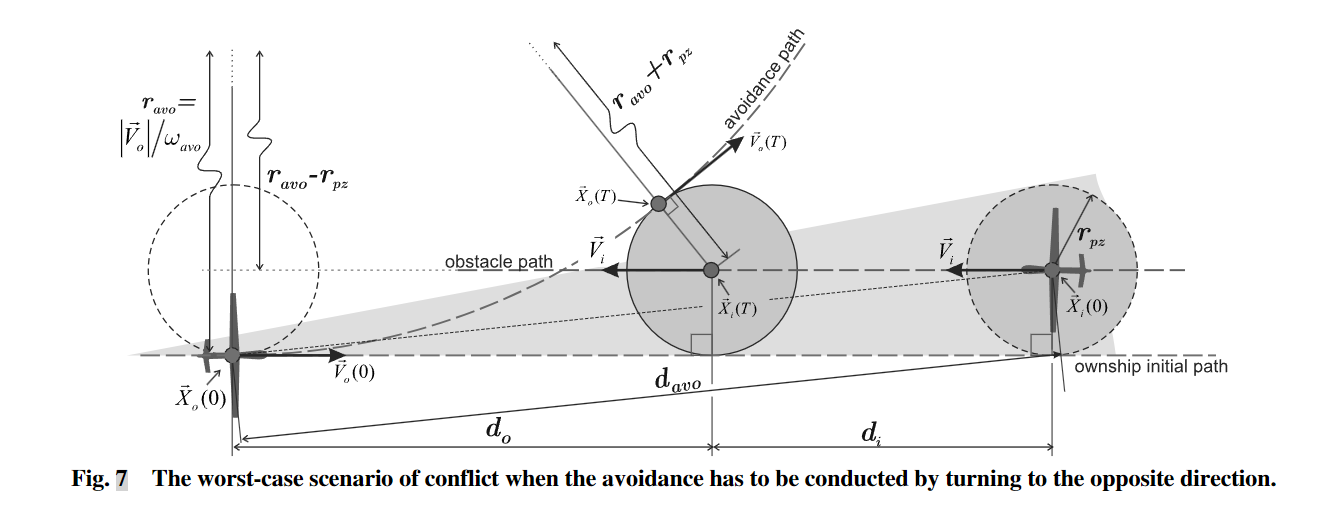
一般来说向左或向右转,能得到两个临界ωavo\omega_{avo}ωavo的解(比如上图中的无人机除了虚线圆弧路径,保持ωavo=0\omega_{avo}=0ωavo=0,也就是直线走,也不会撞上障碍物),但在论文中是按最坏情况去考虑,也就是选择两个临界ωavo\omega_{avo}ωavo的解中较大值,然后在这个临界值的基础上再增加10%,才得到最终的ωavo\omega_{avo}ωavo。然后以ωavo\omega_{avo}ωavo让VoV_oVo往EvoE_{vo}Evo减小的方向去旋转。根据ωavo\omega_{avo}ωavo和时间步长,可以很容易就得到无人机下一时刻的目标速度矢量。
笔者的一些补充
论文中其实还提了多障碍物的情况,无非就是多画几个碰撞锥,流程和单个障碍物差不多。
论文的方法看起来每一步都没有涉及太高深的理论,但笔者在尝试代码复现的时候,发现计算量还是不小,涉及很多循环遍历(获取和搜寻最优EvoE_{vo}Evo)、不同坐标系之间的坐标转换以及方程的求解,尤其是计算ωavo\omega_{avo}ωavo的时候,还出现了方程没有解析解必须采用数值法求解的情况,这又进一步增加了算法的复杂度。最后代码运行的时候,发现速度并没有很快,这相当于速度障碍法原有的计算简单的优势,因为打了太多补丁后,也不复存在。不知道论文原作者的代码是怎么实现的,有没有规避这些问题。
笔者根据自己理解复现的代码:
https://github.com/ouClassmate/Three-Dimension-Velocity-Obstacle-X-Plane.git


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









