







一、LIDAR
1.1 什么是LIDAR
- LiDAR是自动驾驶车辆的关键传感器

1.2 LIDAR是如何工作的
- 工作原理介绍
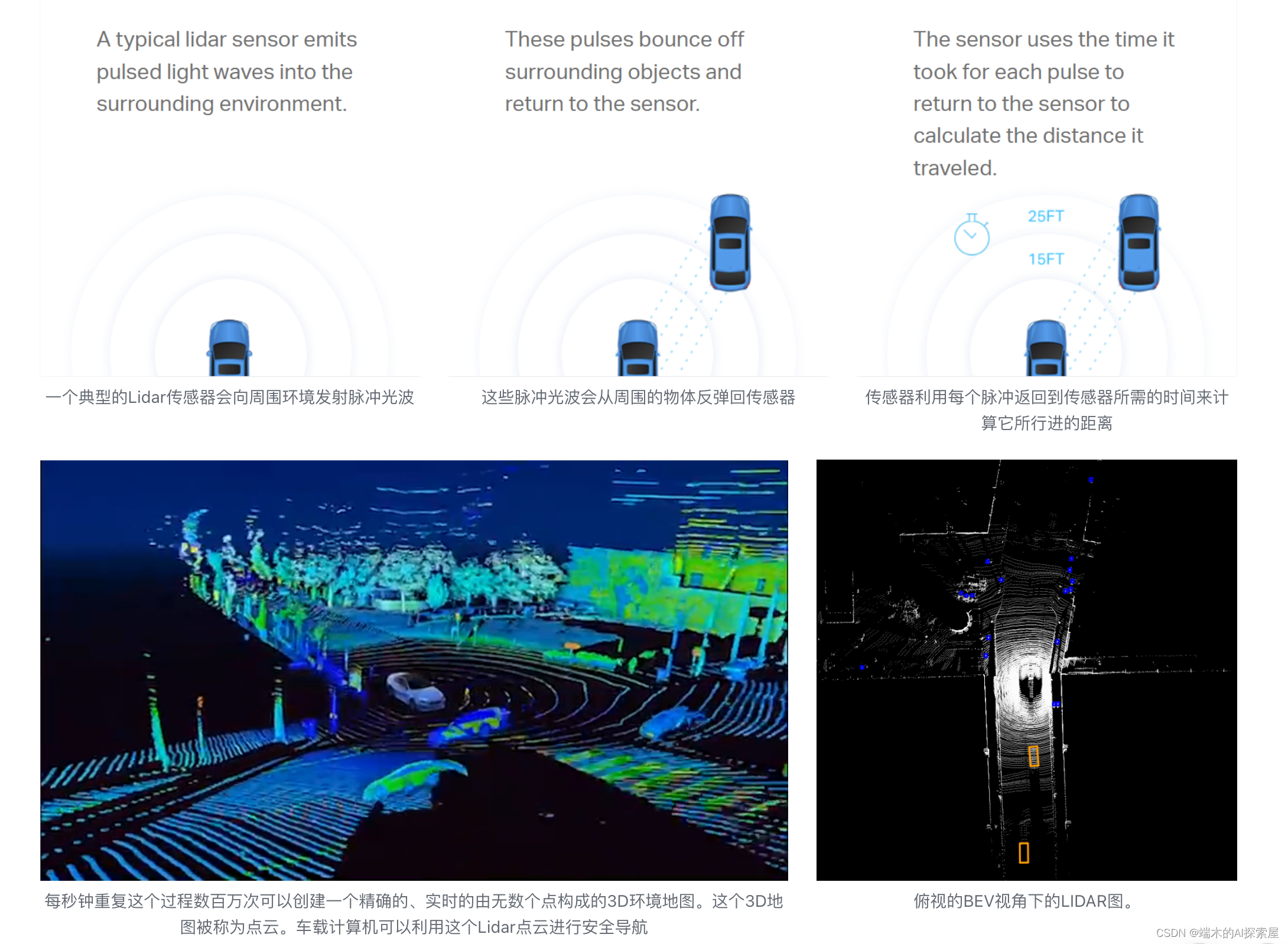
视频
- https://velodynelidar.com/what-is-lidar/
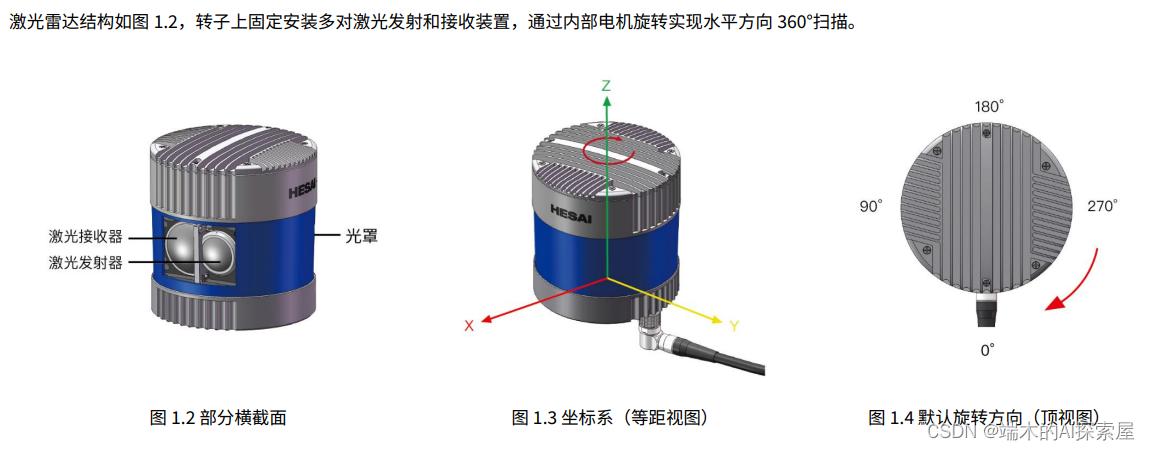
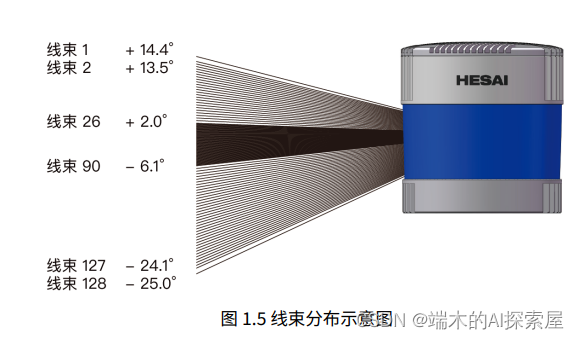
- 机械式LiDAR装备了多个垂直排列的激光发射器,每个发射器都有不同的俯仰角。数量就是线束,通常为16, 32,64, 128。
1.3 具体激光雷达举例
两个不同型号的雷达举例
-
- spinning LIDAR (Velodyne HDL32E)
Nuscenes数据集收集点云数据使用的LIDAR

- spinning LIDAR (Velodyne HDL32E)
-
- Pandar128E3X
- Pandar128E3X
1.4 数据形式
这里以Nuscenes数据集为例子
-
- 数据以.pcd.bin二进制格式储存,pcd就是point-cloud data,文件如下
![[图片]](https://i-blog.csdnimg.cn/blog_migrate/dd7c2963d21ed5388d6d42a845f9af83.png)
- 数据以.pcd.bin二进制格式储存,pcd就是point-cloud data,文件如下
-
- 最终Lidar数据以N个[x, y, z, intensity, ring index]格式的数据储存。
特点:
-
1)较为准确的3D位置信息
-
2)非结构化。
- 一般不会直接被3D目标检测器处理。必须通过某种表达形式将其编码为更紧凑的结构,目前主要有以下五种表达形式:基于点的(point-based)、基于体素的(voxel-based)、基于支柱特征的(pillar-based)、基于投影的(projection-based)和基于图的(graph-based)。

- 一般不会直接被3D目标检测器处理。必须通过某种表达形式将其编码为更紧凑的结构,目前主要有以下五种表达形式:基于点的(point-based)、基于体素的(voxel-based)、基于支柱特征的(pillar-based)、基于投影的(projection-based)和基于图的(graph-based)。
-
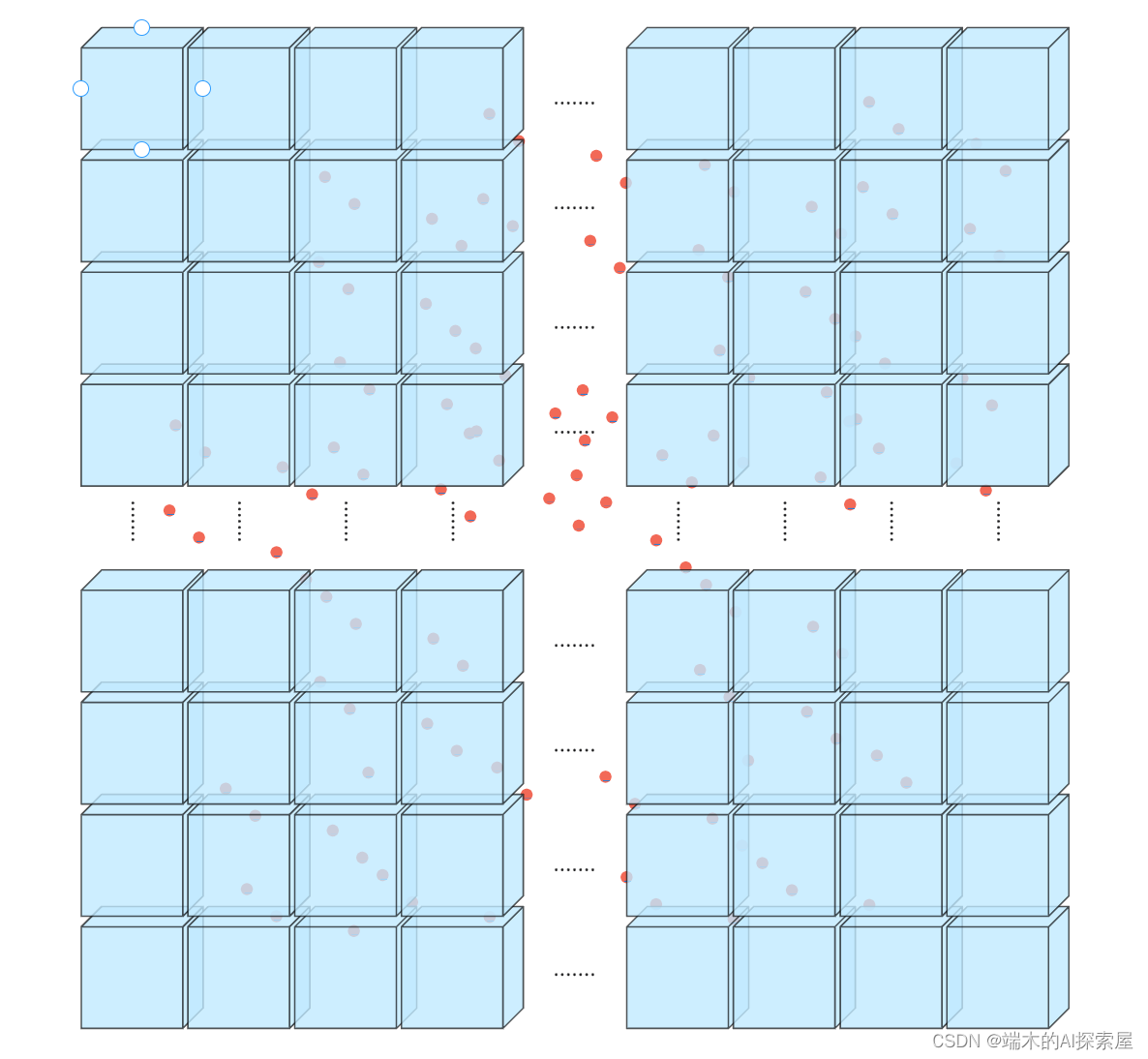
3)稀疏性。
- 实际LIDAR的voxel划分,是把-54米到54米,高-5米到3米,用1440144041的格子划分。这导致LIDAR划分的空间非常大。这导致LIDAR的点,在这个空间中,十分稀疏。
- 稀疏度大,用标准卷积卷,浪费计算量很严重。90%的卷积。卷空气。
代码简单理解
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 0. 首先,数据来源是v1.0-mini数据集(nuscense迷你版)内的 sweeps/LIDAR_TOP
file = "n015-2018-10-02-10-50-40+0800__LIDAR_TOP__1538448760497849.pcd.bin"
pc = np.frombuffer(open(file, "rb").read(), dtype=np.float32)# print(pc.shape) # (173760,)
# 1. 了解数据结构,数据由5个部分组成
# Data is stored as (x, y, z, intensity, ring index).
# x y z 就是基于激光雷达的3d坐标系
# intensity 反射强度,指的是,激光接收器接受的 激光的反射次数
# ring index 第几条线,激光有32线, 他就是1-32的数字。 课程中不用
# 所以改变下形状输出# print(pc.reshape(-1, 5)[0])
# [-2.942755 -0.59551746 -1.7575045 20. 0. ]
# print(pc.reshape(-1, 5)[10])
# [-4.5377426 -0.5805964 -1.4302253 36. 10. ]
pc = pc.reshape(-1, 5)[:, :4]
x, y, z, intensity = pc.T
# 解包方法x.shape, y.shape
- 点云效果

1.5 扩展阅读
- 首先推荐手写ai在b站上的两个视频。
- 推荐文章:
- 《A comprehensive survey of LIDAR-based 3D object detection methods with deep learning for autonomous driving》
- https://zhuanlan.zhihu.com/p/532803205,下方为原文
https://www.sciencedirect.com/science/article/pii/S0097849321001321
十、数据来源
- https://velodynelidar.com/what-is-lidar/
- https://www.nuscenes.org/
- https://www.nuscenes.org/nuscenes
- https://velodynelidar.com/wp-content/uploads/2019/12/97-0038-Rev-N-97-0038-DATASHEETWEBHDL32E_Web.pdf
- https://zhuanlan.zhihu.com/p/532803205
- https://www.sciencedirect.com/science/article/pii/S0097849321001321
- https://hesaiweb2019.blob.core.chinacloudapi.cn/uploads/Pandar128E3X_%E4%BA%A7%E5%93%81%E6%89%8B%E5%86%8C_128-zh-230710.pdf

















 9169
9169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









