




本章涉及服务通信
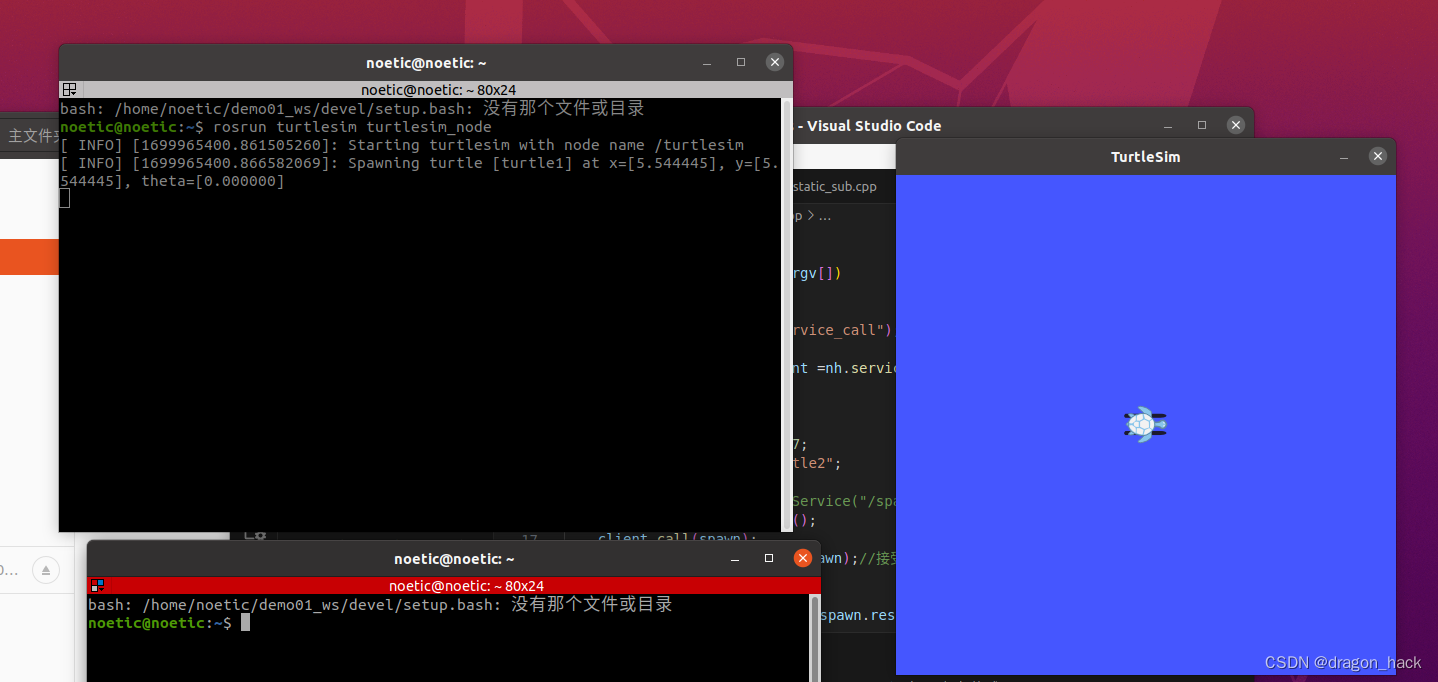
1.首先运行小海龟(保证有小乌龟的服务)
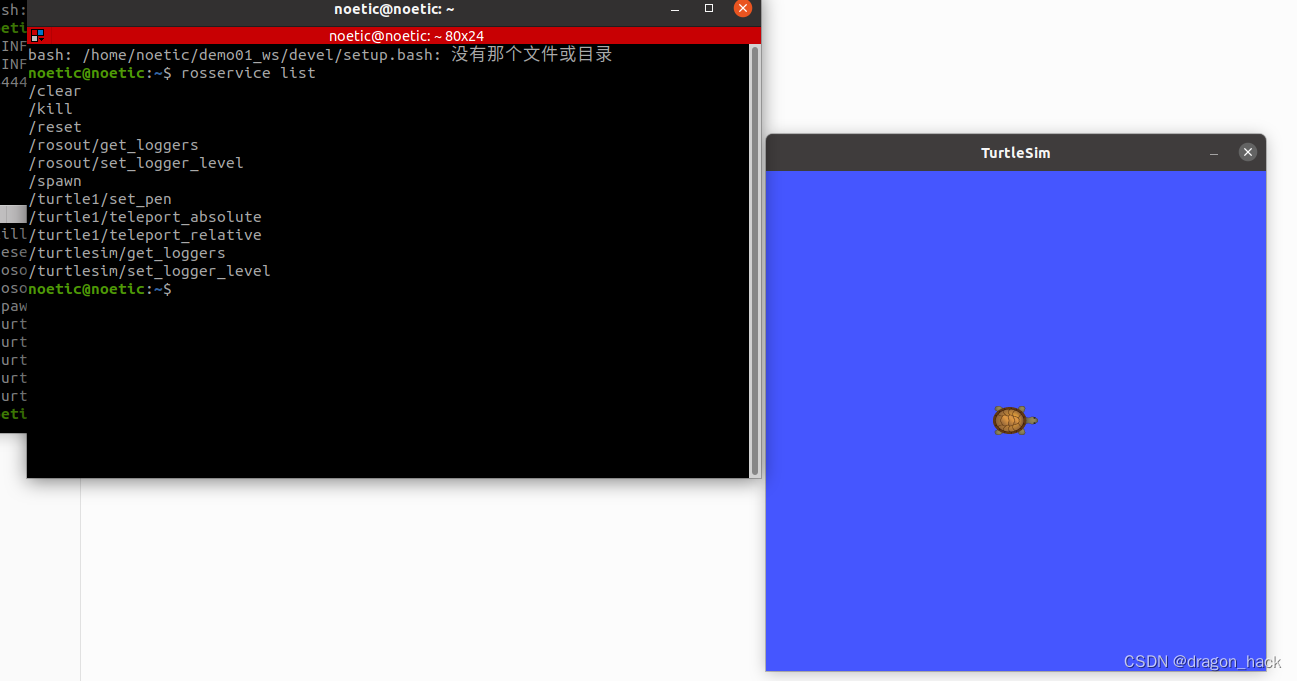
2.通过rosservice list查看话题
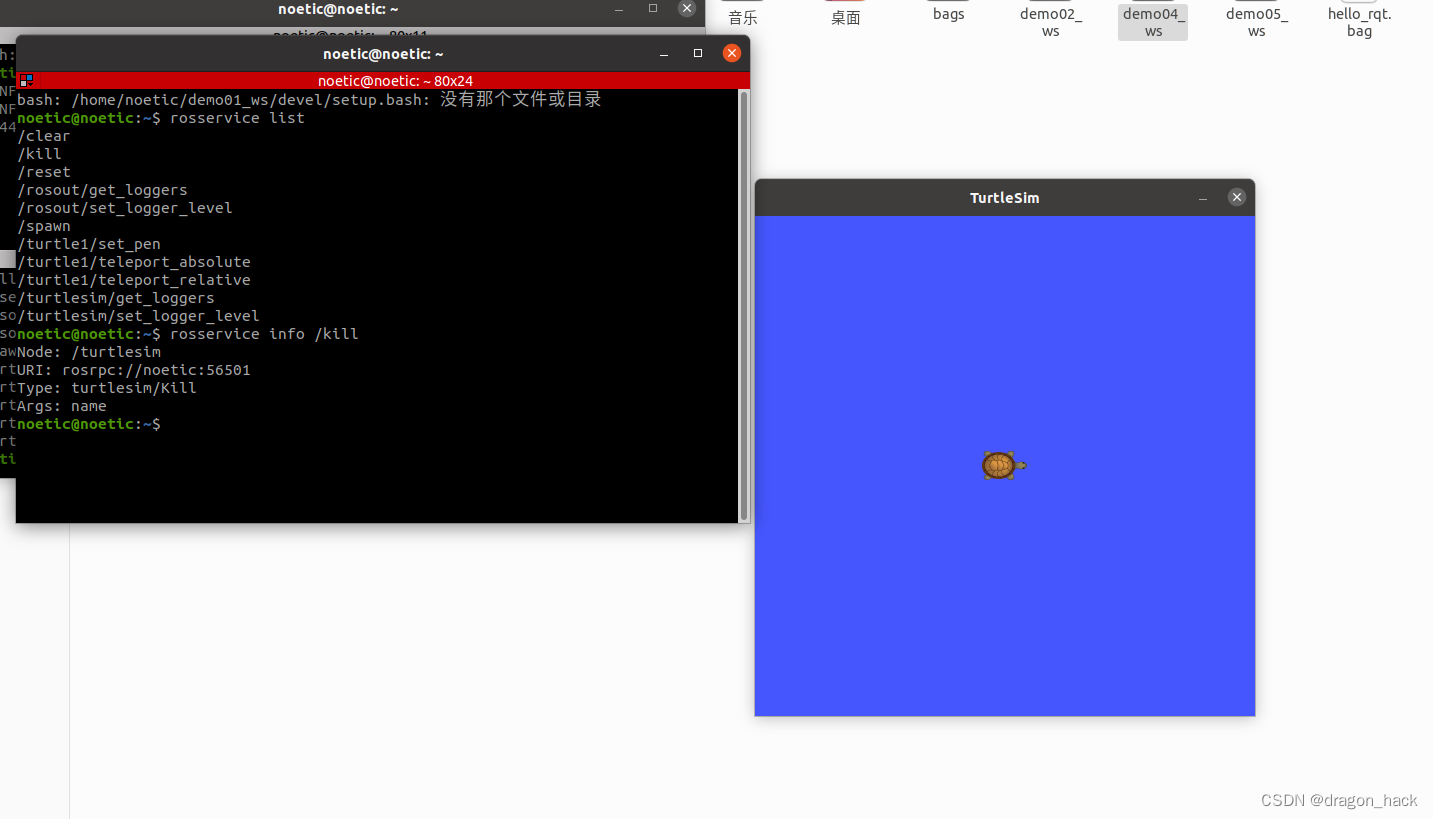
3.然后通过 rosservice info /kill 查看消息(Type)
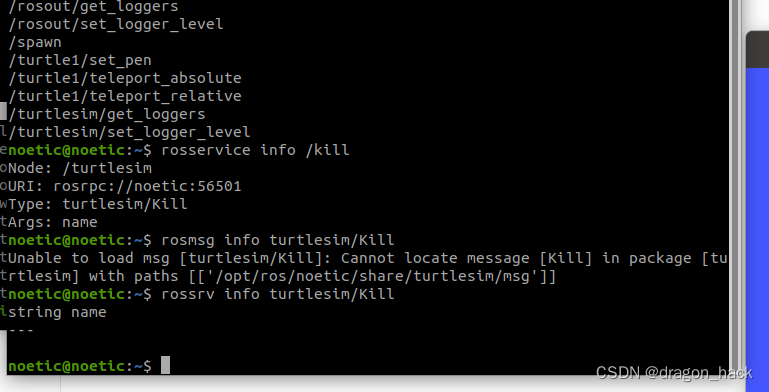
 4.通过rossrv info turtlesim/Kill 查看消息格式 (可以干嘛)
4.通过rossrv info turtlesim/Kill 查看消息格式 (可以干嘛)
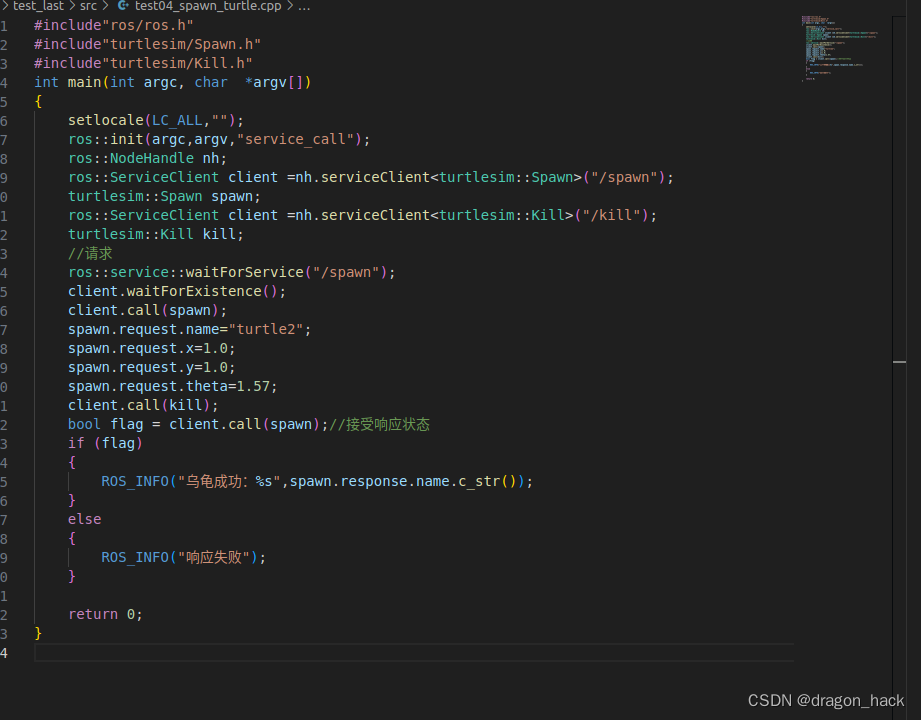
 5.最后通过代码实现(生成小海龟太简单不演示)
5.最后通过代码实现(生成小海龟太简单不演示)
 小海龟服务通信教程:查看、操作与实践,
小海龟服务通信教程:查看、操作与实践,
 本文介绍了在ROS(RobotOperatingSystem)环境中如何使用`rosservice`命令进行服务通信,包括查看可用话题、检查消息类型和格式,以及通过代码实现的具体步骤。
本文介绍了在ROS(RobotOperatingSystem)环境中如何使用`rosservice`命令进行服务通信,包括查看可用话题、检查消息类型和格式,以及通过代码实现的具体步骤。
本章涉及服务通信
1.首先运行小海龟(保证有小乌龟的服务)
2.通过rosservice list查看话题
3.然后通过 rosservice info /kill 查看消息(Type)
4.通过rossrv info turtlesim/Kill 查看消息格式 (可以干嘛)
5.最后通过代码实现(生成小海龟太简单不演示)
 2943
885
3762
1651
1320
2943
885
3762
1651
1320






















 到【灌水乐园】发言
到【灌水乐园】发言






