



用于汽车应用的感应功率传输:最新进展和未来趋势
I. 引言
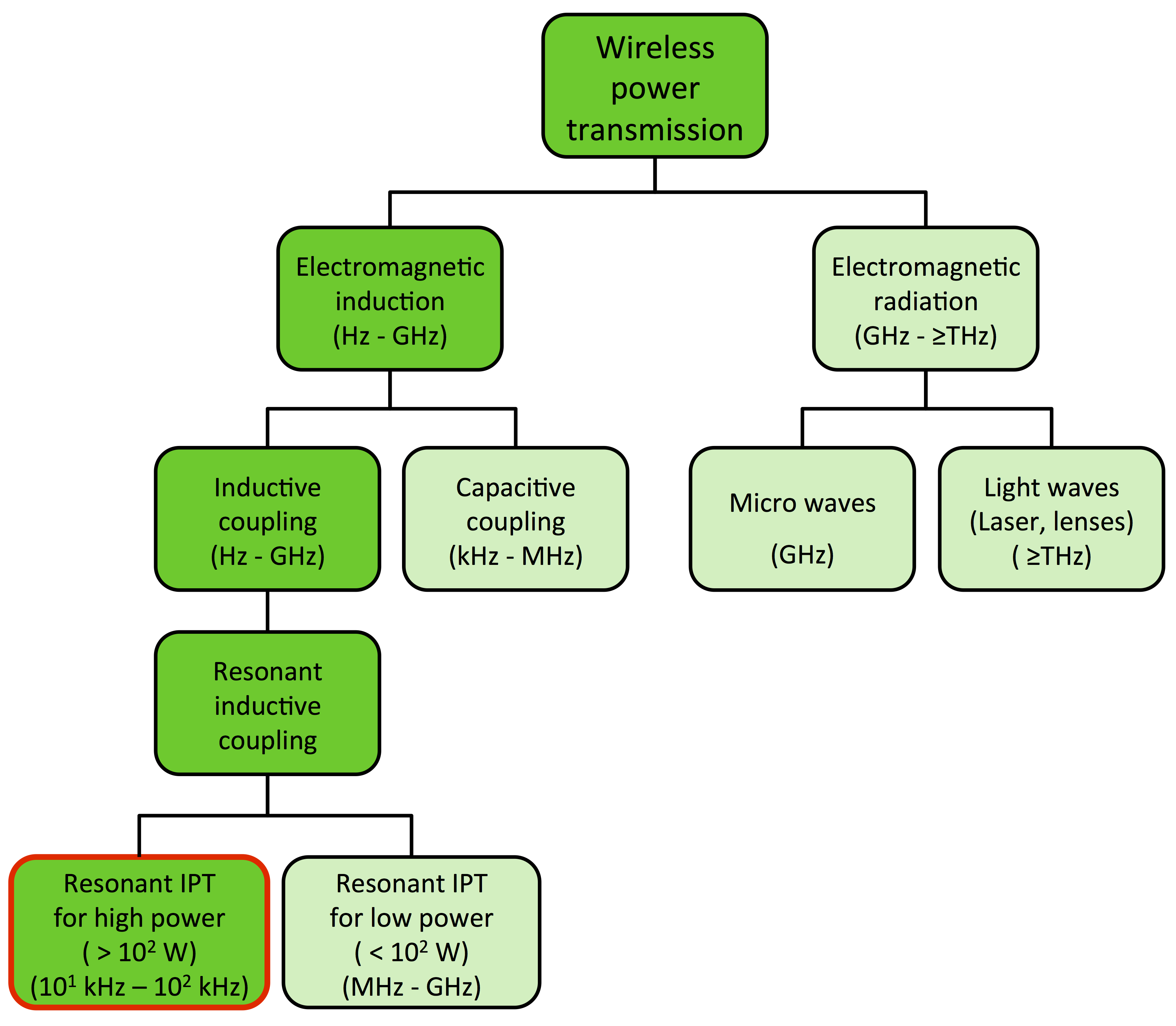
电能是一种非常常见的能量传递载体,其无线传输几个世纪以来一直受到研究人员的关注。著名的例子包括法拉第关于电磁感应的实验、通过流体进行能量传输的研究,以及赫兹在 1832[1],射频通信应用中 1895[2],和特斯拉在1904年进行的远距离无线电能传输实验[3]。近几十年来,科学界将无需导线即可远距离传输能量的各种方式统称为无线电力传输(WPT)。如今,这一定义涵盖了广泛的应用领域、功率等级和传输距离下的多种技术。图 1示意性地展示了涉及电磁场的几种最常见的无线电力传输技术[4]。无线电力传输技术似乎为有效降低电动车 (EVs)电池的成本和管理难题提供了可行方案,从而消除了电动汽车普及的主要障碍。本文中,作者对一种应用于电动汽车充电的无线电力传输(WPT)技术——谐振感应式电力传输(IPT)进行了综述。
II. 磁共振感应式电力传输
无线电力传输(IPT)所遵循的两个基本原理是 1820年安培定律和法拉第于1831年发现的电磁感应原理。安培证明了电流可以产生磁场,而法拉第则表明,随时间变化的磁场与导体相互作用时会产生感应电动势。电路可以在线圈中感应出电动势。这两大定律催生了无数应用,并推动了现代电机的发展。特斯拉提出了无线电力传输[5],的定义,并于1893年在芝加哥世界博览会上展示了一种非接触式系统。七年后,特斯拉获得了利用电感器进行远距离无线电能传输装置的专利,其中他确定了电感传输[6]的两个重要参数:
1) 提高频率以增强电能传输能力。
2) 在线圈上连接电容器(即特斯拉原型中的莱顿瓶),以构成谐振系统并提高传输的有效性。
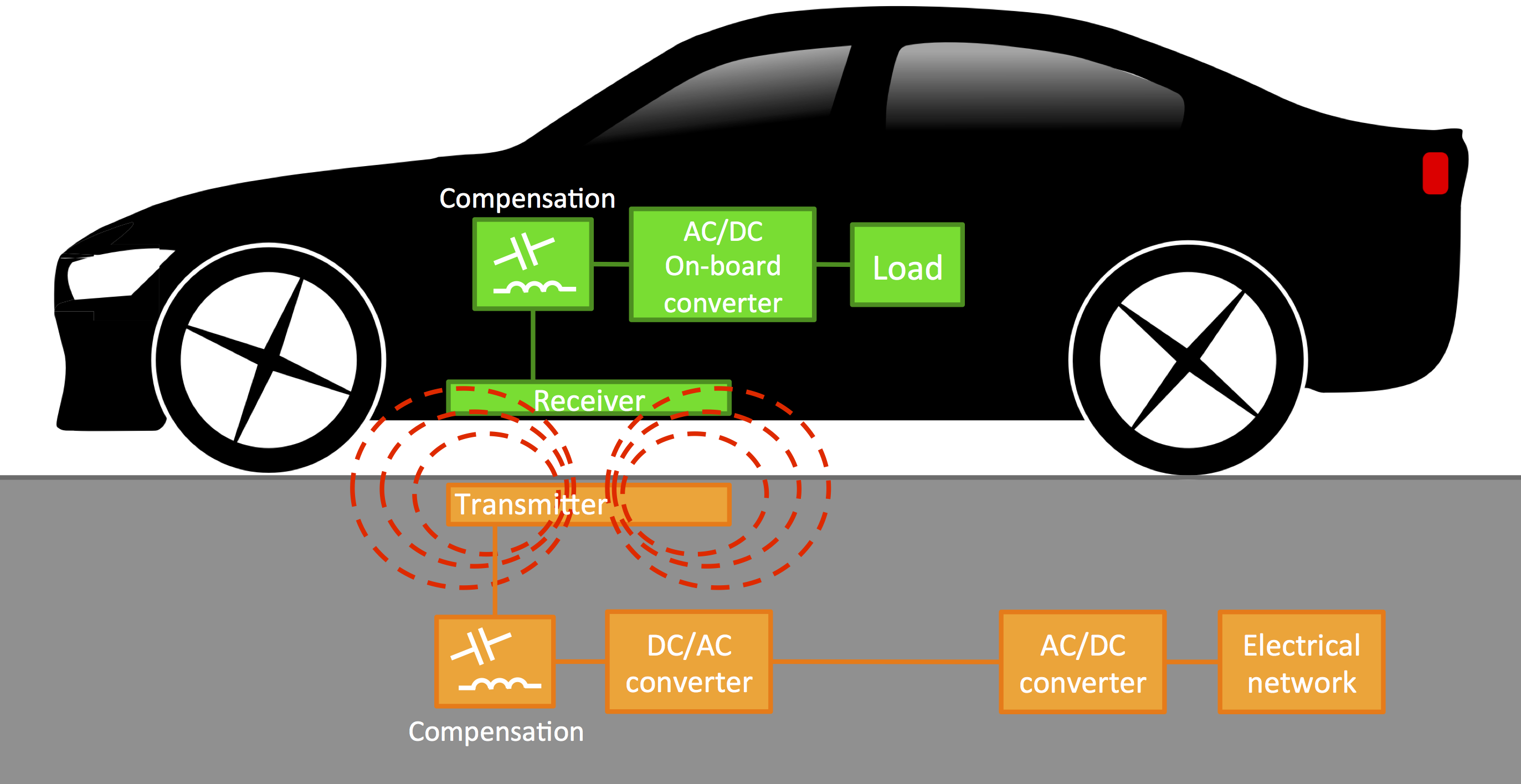
图2展示了用于电动汽车的IPT系统的功能框图。该系统基本由地面以上或以下的线圈(定义为发射器)与位于车辆下方的可移动线圈(定义为接收器)之间的感应耦合构成。发射器通过电力电子转换器供电,该转换器提供高频电流和高频磁场;该磁场与接收器,并实现电能的无线传输。在接收器下游,整流阶段将信号转换为直流电,从而为车辆的电池充电。通常,在线圈中会添加铁磁性、导电及其他辅助材料,这种组合体被称为垫板。由于没有电气触点,IPT系统的发射器和接收器相互独立。这一特点使得充电过程无需外部装置介入,当车辆位于发射器上方时,充电可自动开始,无需人为干预。这种设计显著提高了操作的安全性,并降低了蓄意破坏的可能性。此外,该系统本身对环境条件(如水、污垢、化学品等)具有防护能力。由于不存在电气触点,避免了电腐蚀和粉尘沉积等典型问题,从而降低了维护成本,并提供了具有更长生命周期的坚固系统。这种技术被称为静态IPT,因为车辆在充电时处于静止状态,它极有可能取代传导式系统。然而,由于没有机械约束,还可在车辆运动过程中实现感应传输,即动态IPT。将动态IPT系统集成到道路基础设施中,将消除车辆充电时需要停车的需求,从而可能减少车载电池容量。动态IPT的成功实施将提高电动汽车的接受度,并解决其使用中的最关键问题。IPT的第三种可能应用是静止式或途中静态IPT,即在车辆行驶途中停车时进行充电,例如在交通灯处的停车。这种情况介于静态IPT与动态IPT之间,因为车辆与接收器的对准可能不够精确,但车辆位置实际上相对稳定。
A. 电力电子的黎明
无线电力传输(IPT)的首次真正应用来自苏联电气工程师乔治·伊利奇·巴巴特,他于1943年制造了一辆名为 HF汽车的电动汽车,通过无线电力传输(IPT)[7]供电。该系统由埋在沥青下的铜管和位于车辆下方距地面约20厘米处的接收器组成。该系统通过一个电子管振荡器[8]供电,提供数百安培的电流,频率为 50千赫。感应电流经过整流后直接用于驱动一台2千瓦电机。巴巴特在电路两侧采用了电容补偿,并提出了两种基于电容器调谐和线圈形状变化的功率传输调节技术。该原型的效率仅为4%效率,但它是用于电动汽车的无线电力传输(IPT)系统的首个可运行实现[4]。巴巴特在第二次世界大战结束后移民美国,并为此系统申请专利[9]。首个采用固态器件的IPT系统出现在1974[10],,其使用了额定电流为2000 A、频率为10 kHz的晶闸管逆变器。接收器的共振通过串联电容器实现,并由整流器为直流电机供电。该设计在同年被弃用[11]。在20世纪80年代,加利福尼亚州的PATH项目中设计出了一个带有移动车辆的完整可工作的IPT系统[12]。该项目的目标是开发一段电动道路,用于为小型电动公交车进行感应供电。该系统在气隙为5 厘米 至10厘米之间可变的情况下运行,通过工作在基频400赫兹的电机产生最大2000安培的电流,提供 200千瓦的功率。为了控制功率传输,采用了可变电容器来使接收器谐振频率失谐。实现的效率约为60%,但该原型存在多个关键问题,例如笨重的垫板:接收器长达4.5 米,宽达1米,质量为850千克 11 。到了90年代,由于电力电子器件在数十千赫以上的频率下性能提升,且电流可达数十至数百安培,研究人员和工业界对感应电源传输技术产生了广泛关注。上个世纪末,针对混合动力和电动公交车充电的IPT系统开始推广。1997年,德国万弗勒公司基于奥克兰大学开发的专利,实施了首个用于公共交通的商业化IPT系统[13],[14]。该系统旨在为静止公交车充电,该技术通常被称为静态IPT。为了实现有效充电,接收器需要与埋设发射器对齐,并下降至约4厘米的距离(图4);为此,在车辆下方安装了摄像头。自 2002[15]以来,热那亚和都灵已投入使用在停车期间以完全自动化方式进行无线充电的电动公交车。万弗勒系统是由两对发射器和接收器组成,工作频率约为20千赫,额定电流为80安。每对线圈的额定功率为30千瓦,可实现60 千瓦的电能传输。发射器与接收器之间的小气隙保证了良好的磁耦合并减少了漏磁场。万普勒继续从事该无线电力传输(IPT)的应用开发,作为Conductix,并于2014年 1月将其剥离为独立的感应电源传输技术公司。

III. 最新进展
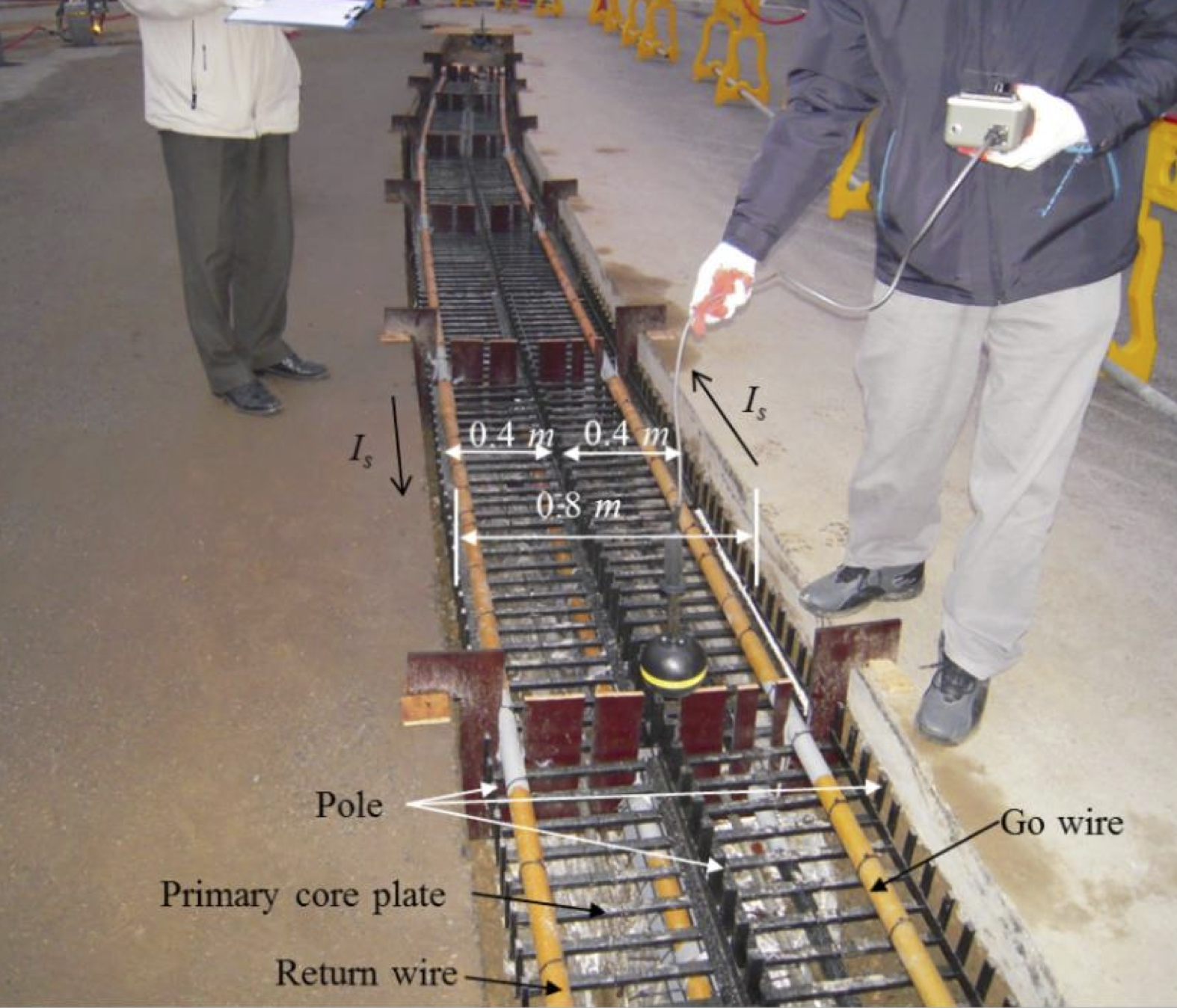
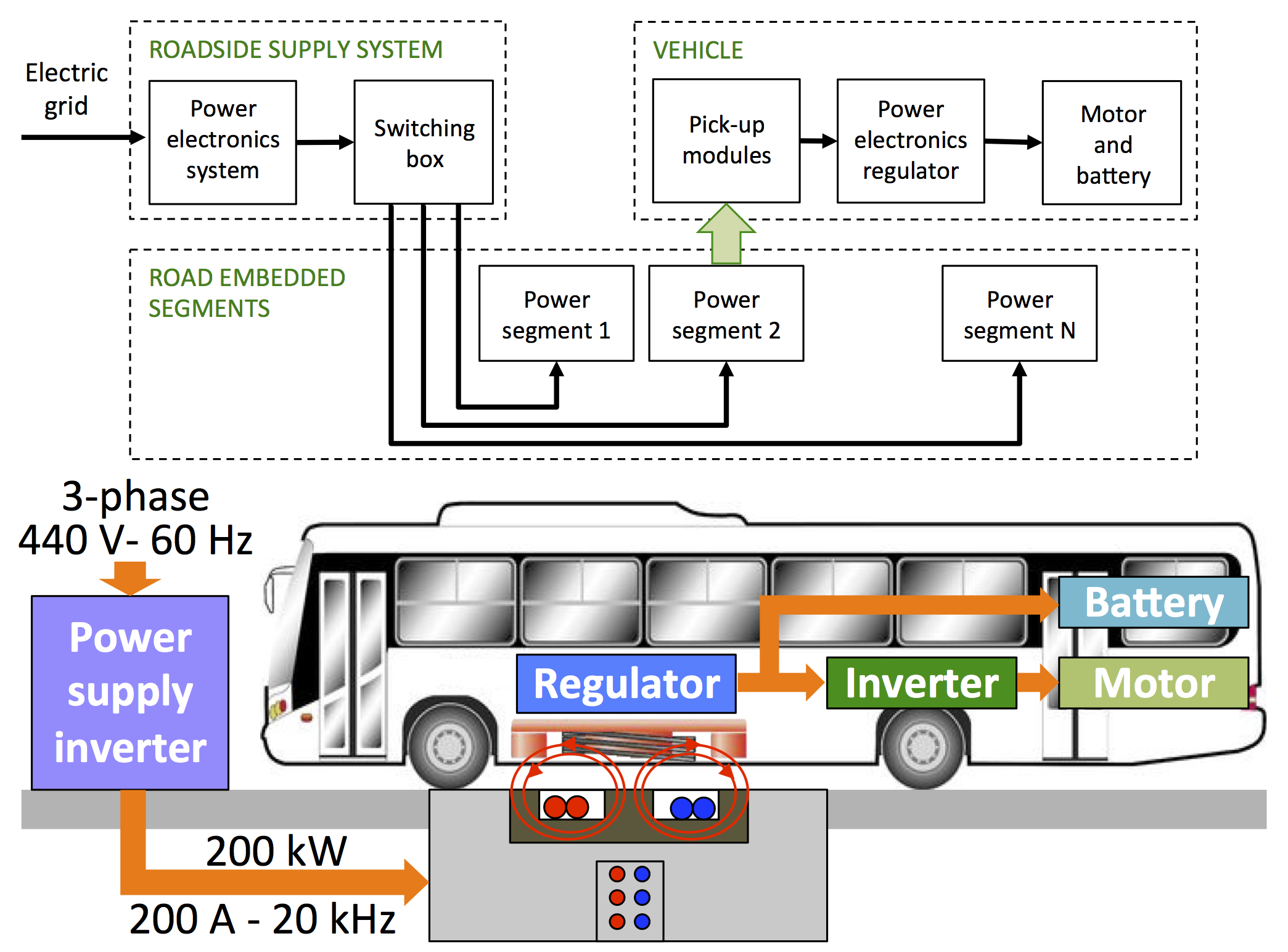
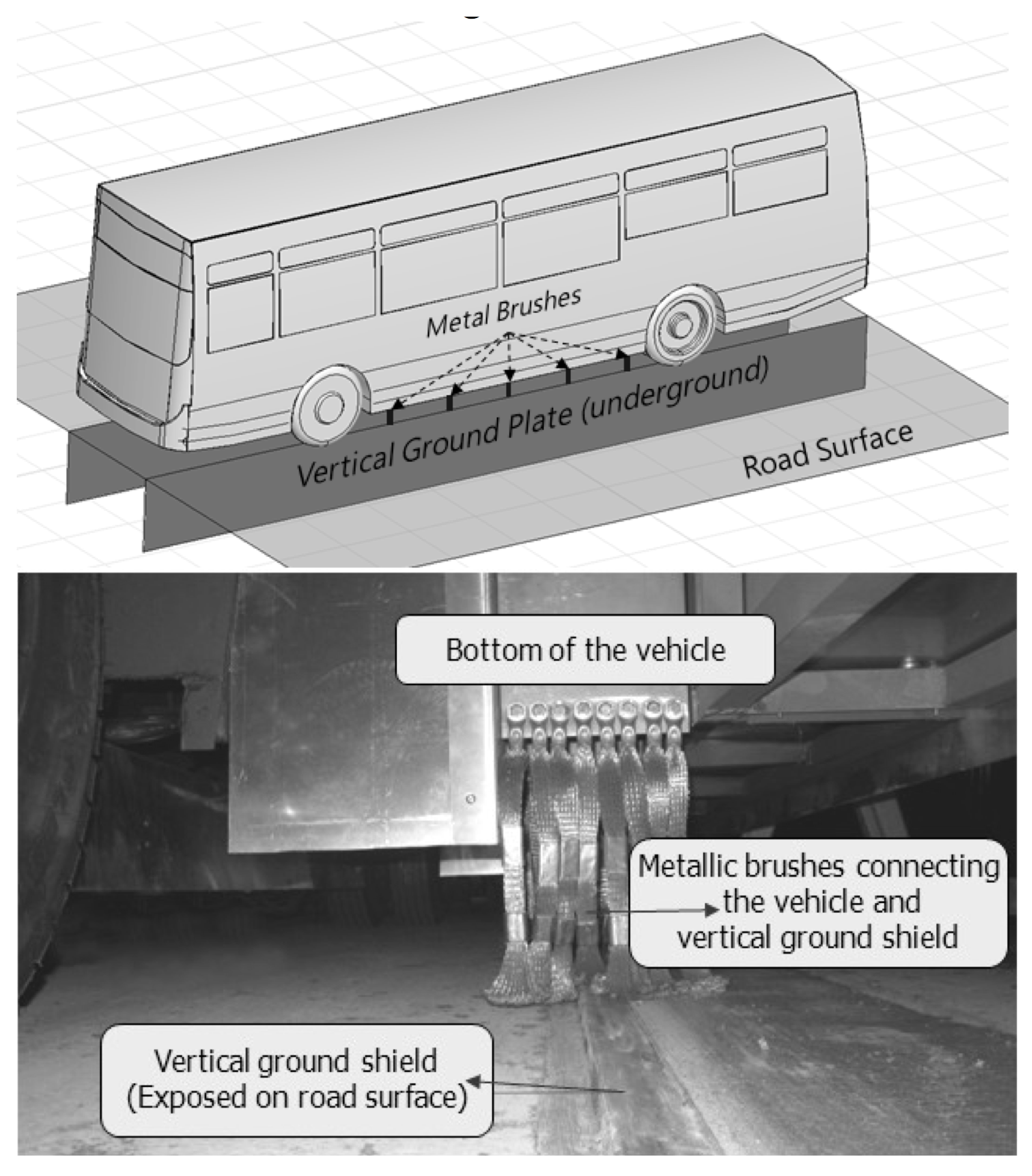
近年来,多家公司和研究中心提出了各自的系统,以通过无线电力传输(IPT)技术提升电动交通水平。WAVE是一家源自犹他州立大学的初创企业,将其IPT技术商业化,用于电动公交车的充电。第一个原型应用于校园接驳车,车上配备的接收器与埋设在公交站路面中的发射器尺寸相同。该系统可在每个公交站实现20千赫频率下 25千瓦的功率传输。电能传输在气隙为 15 − 25厘米的情况下进行,效率达到90% [17]。庞巴迪最近宣布开发了一套名为Primove的IPT解决方案,涵盖电动公交车、轻型商用车和私家车。PRIMOVE IPT系统目前正部署于德国的曼海姆和柏林,以及比利时的布鲁日。通过该系统,公交车在停靠期间可接收约200千瓦的功率 [18]。目前唯一实际运行的动态IPT系统是自2009年起由韩国科学技术院(KAIST)开发的谐振成型磁场(SMFIR)系统。SMFIR概念基于使用大量铁氧体材料,将磁通限制在特定路径内(图5)。该技术于2011年应用于OLEV(在线电动车辆)公交车,目前在韩国的大田和龟尾两地的 KAIST校园内共有两辆OLEV公交车在运行 [20]。如图6 所示,该系统由路边电力转换装置组成,该装置从电网获取电能并整流,然后以20千赫的频率向埋设在道路中的电力轨道(即发射器)供电。道路中嵌入的电力轨道分段安装于122.5米长,每段又分为若干路段,其长度范围从2.5米到 24米[20]。在公交车上安装了一套复杂的主动和被动屏蔽解决方案,旨在将磁场限制在期望的路径上,提高电磁兼容性(EMC),并减少电磁场辐射。图7展示了一个屏蔽系统的示例,其中使用一系列铜制绞线刷形成闭合导电屏蔽路径[21]。韩国科学技术院(KAIST)开发了不同版本的OLEV。3G和4G版本实现了约200千瓦的最大功率传输,效率为74%[22]。在汽车领域,多种用于静态IPT的产品将很快进入市场。2011年,高通公司收购了HaloIPT,这是一家由奥克兰大学分拆出来的新西兰公司。HaloIPT开发了功率范围在3.3千瓦至20千瓦之间的无线电力传输方案,并于2011年与劳斯莱斯合作,后者提出采用感应电源传输技术为豪华幻影电动车充电[23]。麻省理工学院( MIT)的一家衍生公司WiTricity,致力于开发无线功率传输系统各个行业和应用也提出了静态IPT的解决方案。已在3.7、 7.7和11千瓦功率等级上验证了三个系统的功能性,但这些系统尚未商业化[24]。然而,丰田已授权WiTricity无线系统,并开始对其电动和混合动力车型进行试验和验证测试[25]。市场上另一款可用的产品是EVATRAN开发、并与博世合作商业化的Plugless Power,这是一款3.3千瓦的静止式IPT充电系统。该系统可适配各种电动汽车型号,包含一个控制面板(内含电力电子设备并直接连接到低压电网)以及可放置在地面上的发射器垫板。Plugless Power已成功在雪佛兰Volt和日产Leaf电动车上通过测试[26]。
四、研究项目
为了应对关于动态IPT广泛方面进一步研究的必要性,得益于公共和产业资金支持,专门的研究项目正在开展。奥克兰大学和麻省理工学院(MIT)正试图将其静态应用技术扩展至包含动态IPT,并通过其衍生公司HaloIPT和 WiTricity进行推广,同时全球其他研究中心和大学也参与了多个合作项目。在美国,橡树岭国家实验室( ORNL)正在大力投资无线电力传输(IPT)研究。ORNL已开展了静态和动态感应电能传输的研究,目前正在开发耦合线圈设计、功率流控制、漏磁场最小化、错位容差以及互操作性方面的专有技术[27]。ORNL专注于采用单级电力电子系统为多个发射器供电(如韩国科学技术院所采用的方法),并通过无线电通信确定车辆的相对位置系统结合光学传感器作为备用验证。发射器和接收线圈均由相同的圆形垫板构成[28] (图8)。与此同时,韩国科学技术院(KAIST)正在开发第六代OLEV,通过改进发射端结构布局和接收器设计来提高效率[29]。在欧盟,一系列研究项目正在资助中,旨在通过开发感应充电解决方案来探索电动交通的可能改进。Fastincharge和 UNPLUGGED两个项目均始于2012年,研究了不同充电方案(即插电式、静态和动态IPT)对公众接受电动交通的影响。在这两个项目中,基于经济可行性、安全性和标准化,提出了多种静态感应充电方案;同时也分析了这些方案向动态IPT扩展的可能性[30],[31],[32]。这两个项目均证明,在发射器与接收器完全对齐的条件下,两种不同的静态IPT方案均实现了约90%的良好效率,并实现了充电基础设施各组件之间的通信。这些结果表明,使用无线电力传输(IPT)确实可以有效克服当前与车载储能容量和续航里程相关的问题。2012年底,eCo‐FEV项目启动[33]。eCo‐FEV旨在创建一个电动出行平台,以实现电动汽车与协同基础设施的集成。该平台将允许多个基础设施系统之间的通信,包括道路IT基础设施、停车基础设施、公共交通运营商和车辆充电基础设施;这将帮助用户进行行程规划,减少续航焦虑(即电动汽车因电量不足而无法到达目的地的担忧)。该项目的结果证明了所提出的架构在集成电动汽车到不同基础设施中的可行性,能够构建一个协同网络,提供精确的远程信息服务以及基于实时数据的充电管理服务。在西班牙,无线电力传输(IPT)的研究通过Victoria 项目[34]持续推进。该项目始于2013年,由多个工业和学术合作伙伴组成的联盟共同开展。其目标是在不影响运营时间的前提下,通过在马拉加市的一辆公共汽车上直接应用静态和动态无线电力传输技术,使电动公交车的续航里程翻倍。所引用的IPT系统的参数汇总见表I。
V. 标准化过程
IPT系统与电动汽车涉及多个工程领域,因此相关技术标准和指南必须涵盖许多不同的观点。如前一节所述,目前存在多种商用静止式IPT技术,但由于开发时缺乏统一标准,它们中的大多数彼此之间并不兼容。然而,目前已有多个活跃组织正在致力于静止式无线充电系统的标准化工作。美国汽车工程师学会(SAE International)是一个在全球范围内活跃的专业协会和工程标准组织,主要专注于交通行业,该组织制定了SAE J2954和UL 2750[38],标准,并将其与其他相关标准如SAE J2847/6、 SAE J2931/6和SAE J2836/6[39]配对使用。SAE于2016年发布了针对静止式充电应用的《轻型插电式/电动汽车无线电力传输及对准方法》的技术信息报告(TIR) J2954,计划在 2018[40]内将其标准化。国际电工委员会 (IEC)在90年代成立了分技术委员会TC69,致力于制定专用于配备IPT系统的电动汽车的标准,该标准拟以 IEC 61980发布。IEC 6190于2000年达到委员会草案阶段,自2013年起进入“作为委员会草案分发并投票”阶段[16],其“第1部分:通用要求”目前处于即将出版(BPUB)状态[41]。国际标准化组织(ISO)于 2014[42]年2月启动了新的ISO标准ISO/AWI PAS 19363的制定工作。负责起草该标准的小组是分技术委员会TC22/SC2“道路车辆— 电动道路车辆”[43]。各标准化委员会的主要工作可总结如下:
•车辆对准方法;
•不同解决方案的互操作性;
•频率和功率水平;
•车辆内接收器的位置;
•安全性的不同方面,例如障碍物检测、电击保护、磁场水平的参考标准、电磁兼容性;
•电网、车辆和无线电力传输基础设施之间的通信协议;
•解决方案测试。
尽管无线电力传输技术发展非常迅速,但目前尚无针对汽车应用的无线电力传输已发布标准。动态IPT同样如此。在这方面,IEEE标准协会产业连接活动最近批准成立了一个工作组,开展预标准化工作,目标是补充SAE J2954的工作。这目前是唯一一个致力于动态IPT [44] 的工作组。
VI. 一种可互操作的动态IPT方案
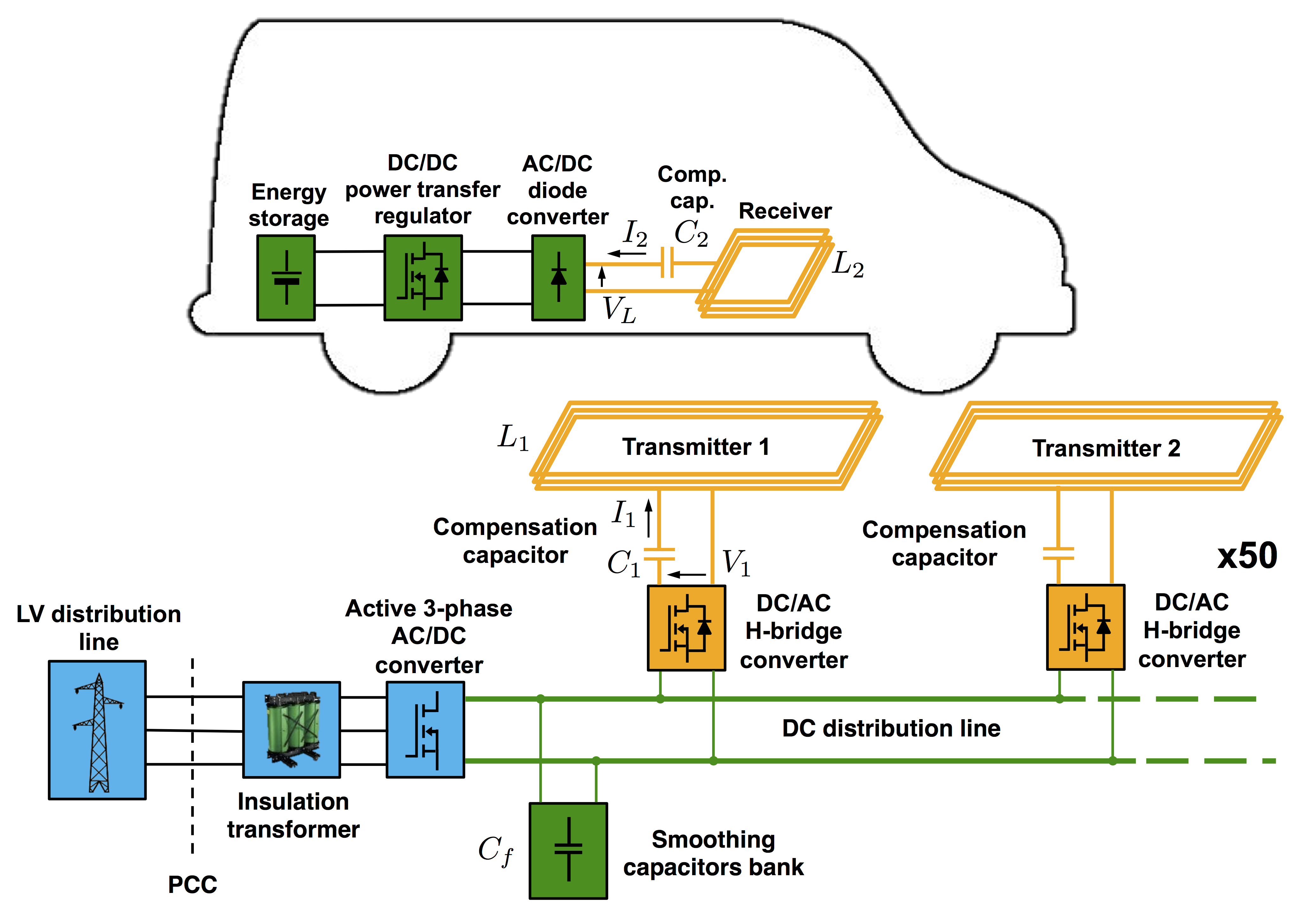
在eCo‐FEV项目启动后,意大利都灵理工大学能源系团队开发了用于轻型商用车的动态IPT第一个原型,该原型由安装在道路表面电缆槽中的五个发射器组成(图9),由单个六极逆变器[45]供电;车辆的存在仅通过光学传感器识别。该系统仅在有限功率和有限速度下进行了测试,但已提供了关于在包含电动汽车、能源供应商和数据基础设施的复杂环境中管理充电基础设施的重要数据[46]。都灵理工团队的研究活动目标是开发适用于轻型商用车的无线电力传输方案。目标用户为私营运输公司,其运营涉及公共城市基础设施以及私人充电点。该系统面向大规模市场,并包含用于通信和计费管理的数据基础设施。目前,此项研究正在FABRIC项目[47],[48]下继续推进。FABRIC项目始于2014年,旨在对多种道路充电技术进行系统可行性分析,以实现电动汽车的续航延长。该项目中由都灵理工大学团队开发的架构被称为行驶中充电( CWD),如图10所示。该架构由一系列50个发射器组成,每个长1.5 米,宽50 厘米,发射器之间间距为50 厘米。与eCo‐FEV项目中提出的方案不同,在FABRIC系统中,每个发射器均由专用的直流/交流H桥变换器供电。POLITO CWD系统还包括将电气设备安装到现有的纯电动轻型商用车上,且未对车辆底盘进行修改。利用车辆特性确定了能够匹配合理速度下功耗的IPT系统额定功率。该评估基于类似于[49],中提出的动态模型进行,假设车辆在无坡度道路上以恒定速度行驶(见第VI‐C节)。额定功率为


| 技术 | 应用 | 额定功率 (kW) | 频率 (千赫兹) | 气隙 最大值 (mm) | 效率 | 参考文献 |
|---|---|---|---|---|---|---|
| 感应电源传输技术 | 静态公交车 | 60千瓦 | 20千赫 | 40毫米 | 90%a | [35] (30千瓦/发射‐接收对) |
| WAVE | 静态公交车 | 25 − 50千瓦 | 20千赫 | 15 −25厘米 | 90%b | [17] |
| 庞巴迪 (PRIMOVE) | 公共汽车 (静态和动态) | 200千瓦 | N/A | N/A | N/A | [18] |
| 韩国科学技术院 (OLEV 3G) | 公共汽车(动态) | 200千瓦 | 20千赫 | 10 −20厘米 | 74%b | [22] (20千瓦/接收器) |
| Halo IPT | 汽车(静态和未来动态) | 3.3 − 6.6 − 22千瓦 | 85千赫 | 125 − 175毫米 | 95%d | [36] |
| WiTricity | 汽车(静态) | 3.6 − 7.7 − 11千瓦 | N/A | 10 −15厘米 | 94%a | [24] |
| EVATRAN (无插头) | 汽车(静态) | 3.3 千瓦 | 19.5 千赫兹 | 100毫米 | 88.8%b | [26] |
| CIRCE/Endesa (UNPLUGGED项目) | 静态公交车 | 50千瓦 | 25千赫 | 25厘米 | N/A | [31] (25千瓦/收发对) |
| ORNL | 汽车(动态) | 2.2千瓦 | 23千赫 | 100毫米 | 75%c | [37] |
| 都灵理工大学 (POLITO CWD) | 轻型商用车和汽车(动态) | 20千瓦 | 85千赫 | 10 −25厘米 | 91%c |
表I:被引IPT系统主要参数汇总
a测量点信息不可用 。 c交流/直流输出到车载交流/直流输出。
b交流电网到电池输入。 d线圈到线圈。
每个IPT系统的直流/交流转换器均选择20千瓦。该功率水平足以在与发射器完全横向对齐的条件下,满足所采用车辆最高约70公里/小时的功耗需求。在接下来的章节中,将详细讨论系统的各个组件。
A. 磁结构
文献中提到的发射器形状基本上分为两种类型:长轨线圈和与接收器尺寸相同的小线圈。长轨线圈的主要优势在于车辆沿轨道移动时能够实现连续的电能传输。当车辆位于线圈上方时,可通过一个唯一的电源转换器对轨道进行供电。此外,如果线圈的尺寸足够长,则对车辆的检测无需极其精确和快速[50]。然而,由于发射器的尺寸远大于接收器,线圈未耦合的较长部分会导致强漏磁场的存在。漏磁场在电磁兼容性方面可能对车载电子设备造成影响,同时也对车辆附近人员的电磁暴露带来重要问题[51]。采用小型发射器的结构可以减少这些问题,但会牺牲连续电能传输的能力,并且需要非常快速且精确的车辆检测系统[52]。POLITO 系统实施了一种折中方案:采用较长的发射器,其尺寸设计使得在额定电流激励下,即使存在错位情况,每个发射器线圈也完全被车辆本体覆盖。与以往大多数研究相比,另一个重要区别在于仅在接收器结构中使用铁氧体。这一选择的主要理由是降低系统的整体成本,这也与其他近期研究中的建议一致 [53],[54]。去除铁氧体不仅提高了路面维护的效率,还增强了系统对振动的鲁棒性。此外,一个显著的次要优势是,由于线圈长度较大,无铁氧体设计有助于保持较低的自感值。发射器已埋设于路面下方 5 厘米处。当某一发射器处于工作状态并通以额定电流时,50 厘米的间距可确保其与邻近非工作发射器之间实现有效耦合,从而产生的感应开路电压低于 30 伏特。该电压不会对直流/交流转换器造成问题,在启动阶段也完全可控。
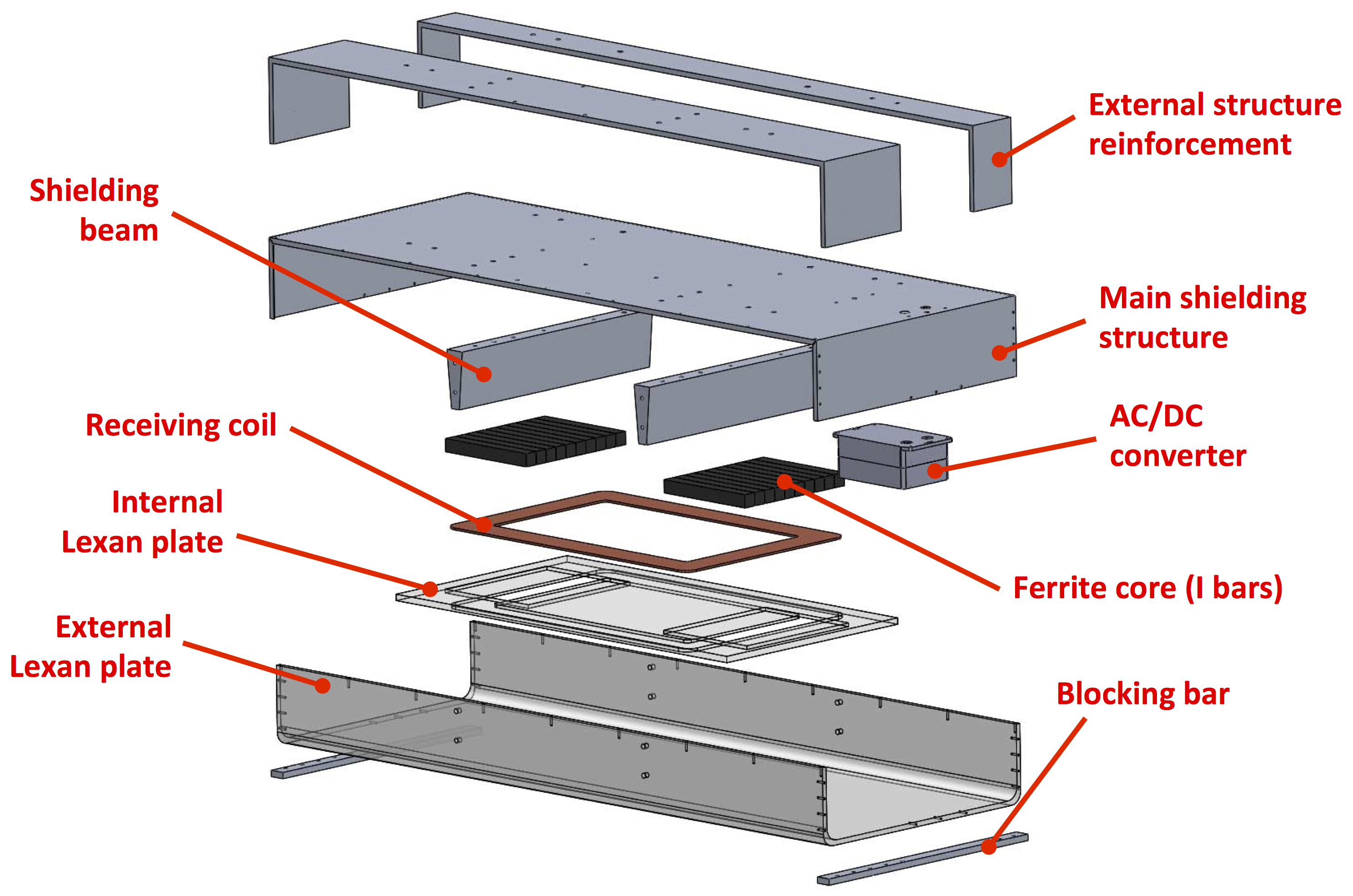
在不同的方案中,例如[36],[55],,接收线圈选用了简单的矩形形状,因为这种形状结构简单且对错位具有较高的容差[56],[57]。该线圈是某一结构(图11)的一部分,该结构经过设计和优化,以最大化耦合并最小化车辆外部的漏磁场:以此符合国际非电离辐射防护委员会的要求
对人体暴露的限制 [58],[59]。因此,该结构还起到电磁屏蔽的作用,其目的是将磁场限制在车辆下方的指定空间内。接收结构安装在车辆后部,并增加了支撑件以确保机械鲁棒性和抗振动能力。接收器的尺寸通过优化过程确定,目标是在运动方向上长度尽可能短的同时,在额定条件下获得一定的互感值(14.3 µH)。实际上,较短的接收器意味着在移动过程中恒定耦合和恒定传输功率的时间更长。在额定条件下,埋设发射器与接收器之间的距离为25厘米。相关的自感值分别为发射器 280 µH和接收器 120 µH。由于线圈之间距离较大、车辆底盘间距较远以及发射器侧无铁氧体,这些值受车辆位置的影响较小。移动对接收器电感没有影响,而发射器电感的变化小于3%。这种稳定性也体现在线圈耦合上。在错位情况下,系统能够传输降低的功率,最大可承受30厘米的横向错位,此时耦合系数约为0.05。
B. 供电侧与电力电子
直流/交流转换器组通过构成整个IPT系统直流母线的直流配电线路供电。特别关注了对人员电击风险的防护。事实上,在发生接地故障时,杂散电流可能流通并使地下导体带电。这种情况对在地面轨道附近作业的操作人员具有潜在危害。因此,该系统通过一个II类绝缘变压器(即一次侧和二次侧之间至少有两层绝缘保护)连接到低压配电系统,从而将公用三相配电系统与IPT系统进行电气隔离,允许采用专用的IT系统[60]。该方案确保了即使在发生首次接地故障后,电源供应仍能持续运行。在不危及操作人员安全性的前提下,选择了IT接地系统,因为在TN系统中,由于存在有源变流器,间接接触保护受到挑战。事实上,在发生接地故障时,变流器会主动将故障电流限制在其额定电流附近,以保护其电路。这种电流限制可能导致过电流保护装置无法及时跳闸,使人员面临触电风险。值得注意的是,一些国家和国际标准规定了街道、高速公路、道路、小巷、车道和停车场下方电缆的最小埋设深度(例如,《国家电气规范》(NEC)要求 60 cm [61])。然而,该要求可能仅适用于配电电缆,而不适用于发射线圈。一种解决方案是所有电缆均采用II 类(即双重绝缘)[62] 。当充电站处于运行状态时,道路作业人员在道路上作业仍存在危险情况。为确保安全性,必须将充电区域视为带电作业区,并对操作人员进行适当培训。
三相交流/直流转换器为630伏的稳定直流配电线路供电,该线路为直流/交流(即直流电转高频交流电)转换器提供支持,形成分布式直流链路。变压器和交流/直流转换器的额定功率选择为50千伏安,以便测试两辆车辆同时在配备的充电车道上行驶时的工作条件。线圈之间的距离设置为:在车辆移动过程中存在一段时间,接收器未与任何发射器耦合。该方案可简化正确发射器的激活过程,并实现对车辆在线圈上方位置的识别。然而,车辆从一个发射器过渡到下一个发射器时,可能会引起吸收功率的突变,从而在公共耦合点(PCC)处对电网造成应力。这种应力可能因可能的电压波动而导致电能质量下降。为缓解此问题,提议引入由超级电容器构成的电容平滑装置,类似于[28],[37]中的做法。电容器组的目的是保持交流/直流转换器输出端电流恒定,从而降低公共耦合点(PCC)处的谐波含量。电容值根据[63]中提出的分析结果确定为2.6 F。采用的直流/交流转换器通过固定频率控制技术为每个发射器供电。工作频率选择为85千赫,以符合SAE标准 J2954,作为未来静态和动态系统之间互操作性的基础。所开发的电力电子装置已在[64]中介绍。
在车辆上,二极管整流级与电池之间连接有直流/直流转换器,以有效管理接收到的功率。当从一个发射器过渡到下一个发射器时,耦合的不连续性可能导致电动汽车充电的不连续。
1系统,其中电源系统的中性点接地,设备外壳通过保护导体连接到安装的主接地母线,该母线与电源系统的接地点相连。
| 参数 | 值 |
|---|---|
| 额定功率 | 20千瓦 |
| 额定频率 | 85千赫 |
| 额定直流初级电压 | 630伏 |
| 发射机电流 | 36 A |
| 接收器电流 | 75 A |
| 发射器内径尺寸 | 0.5 m × 1.5 m, 10 匝 |
| 接收器内径尺寸 | 0.53 m × 0.3 m, 10 匝 |
| 线圈间距 | 0.5 米 |
表二:POLITO CWD系统的主要参数
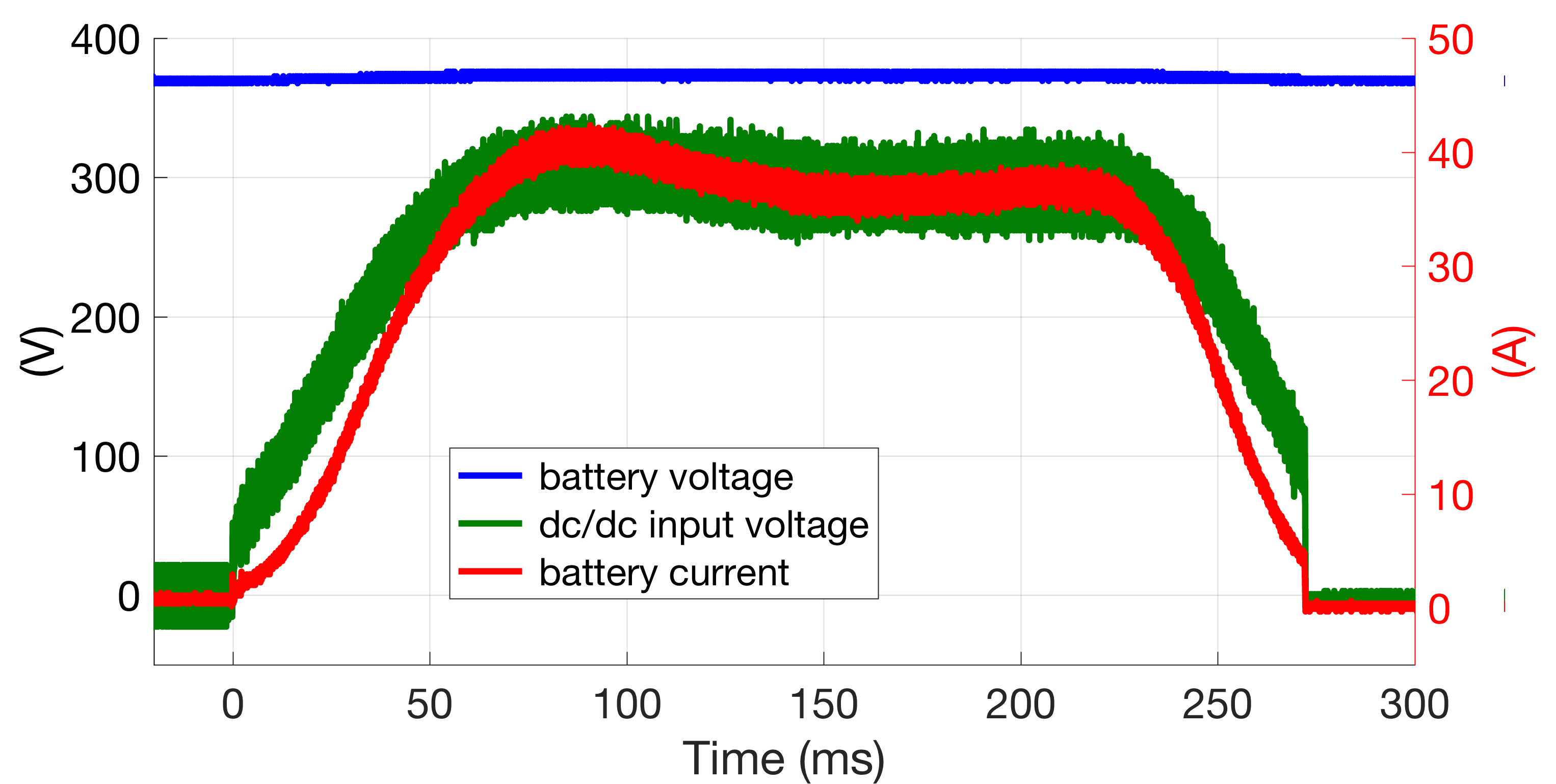
电池。这种波动可以通过在接收器侧添加电容平滑来管理,例如 [28]。POLITO CWD系统的主要参数总结于表二。图12展示了车辆以约20 km/h的速度通过发射器且无对准控制时,通过示波器记录的部分车载参数的波形。
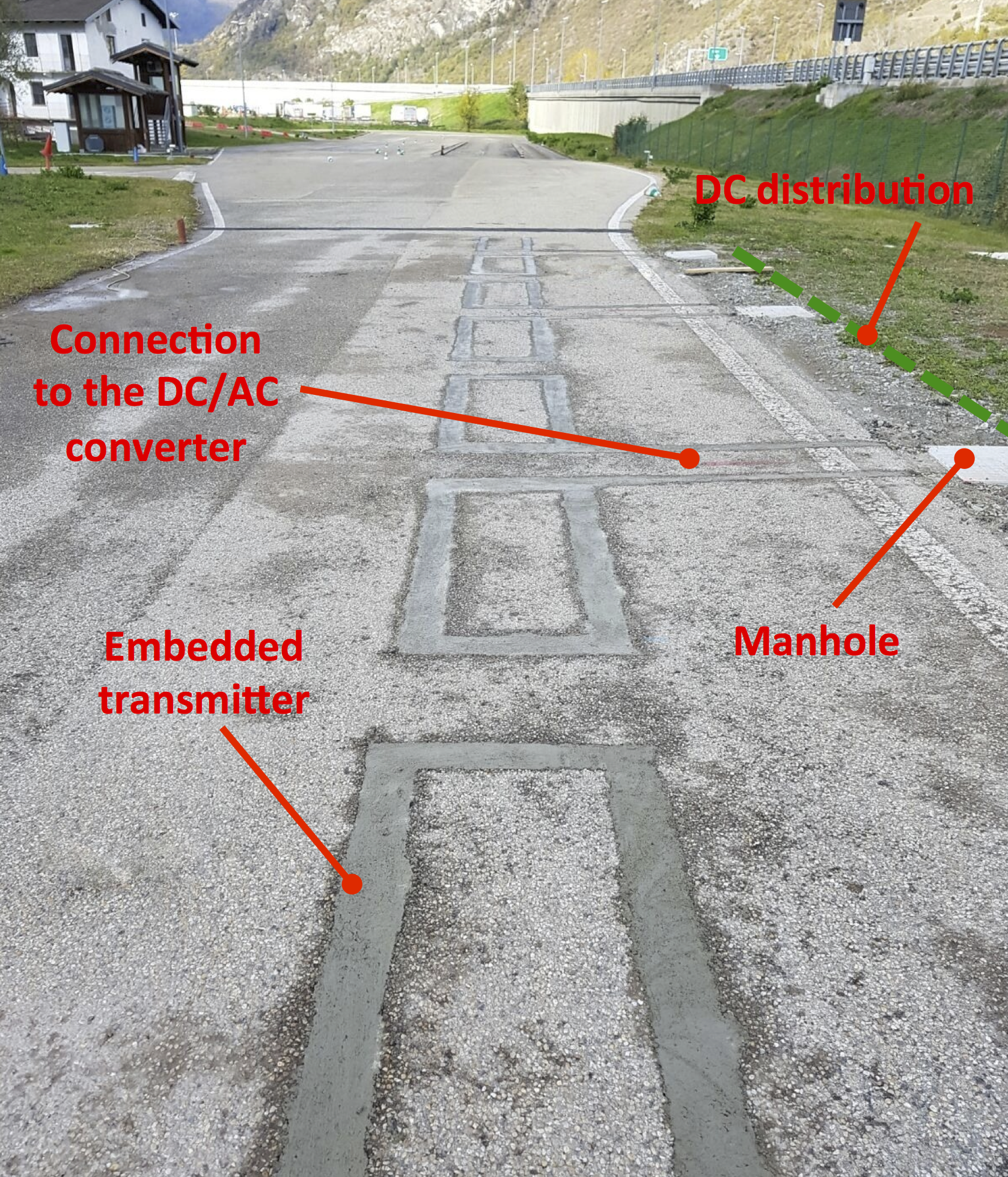
C. 道路安装
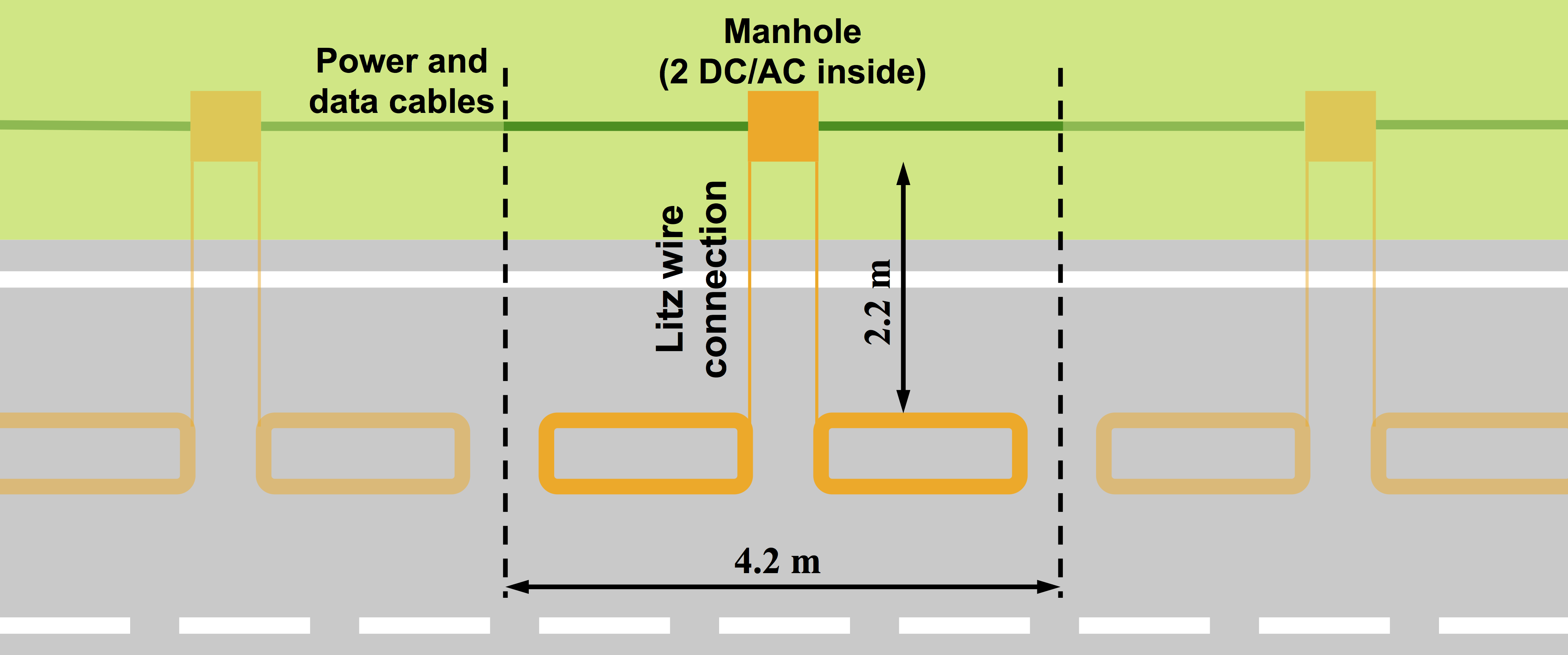
已实施的充电车道的最终外观如图13所示。发射器嵌入路面下方,并通过一种特定开发的嵌入方法(此处未详细说明)来保护线圈的电气和机械完整性。两个连续发射器的端子连接至位于车辆侧的人孔,人孔内设有两个直流/交流转换器。该人孔也是直流配电线路与转换器之间通过输入/输出配置进行连接的节点。该线路与标准电压为 230伏,50赫兹的辅助交流配电线路一同铺设于地下60厘米处。该线路连接至一个配电箱,其中放置了变压器、交流/直流转换器和电容器组。根据图14的示意图,充电单元被用作参考来估算充电车道实施成本,成本总结见表 III。最终成本约为558 e/m。同样,基本单元可用于估算需配备充电设施的道路百分比,以确保在车辆不同恒定速度下电池荷电状态保持稳定。此评估可将每个基本单元视为提供额定
功率为 Pr= 20 kW,并根据稳态模型估算车辆 Pve的自耗电量:
$$
P_{ve} = \frac{1}{\eta_{tr}} \left( mgC_r v + \frac{1}{2} \rho A_f C_x v^3 \right)
$$
(1)
其中 m是车辆的质量, g是重力加速度, ρ是空气密度, v是车速, Af是迎风面积。 Cr和 Cx分别为滚动阻力系数和阻力系数。对于所采用的车辆,这些参数的值为
| 描述 | 数量 | Cost |
|---|---|---|
| 直流电缆 | 4.2 米 | 15.00 e |
| 数据和辅助供电电缆及管道 | 4.2 米 | 8.00 e |
| 人孔 | 1 | 20.00 e |
| 电源和数据连接器 | 1 | 40.00 e |
| 发射器和补偿电容器 | 2 | 500.00 e |
| 直流/交流转换器 | 2 | 600.00 e |
| 发射机嵌入材料 | 一次性费用 | 300.00 e |
| 直流线路和人孔敷设人工 | 一次性费用 | 320.00 e |
| 发射机嵌入人工 | 一次性费用 | 540.00 e |
| 总成本 | 2343.00 e |
表III:充电单元组件及成本。
m= 3500 kg, Af= 3.8 m2, Cr= 3.8 m2。滚动阻力系数的值取决于车辆速度以及轮胎和路面的类型与状况。在所提出的情况下,该系数的值实际上为常数,等于 0.015。加入效率 ηtr= 0.8是为了考虑动力传动系统的效率。在不同速度下已配备道路的百分比为 Pve/Pr,如图 15所示。
七、结论与开放问题
这项工作基于[65]。静态感应式电力传输是一项成熟的技术,很可能将在汽车应用中得到广泛应用。由于无需电气触点,该系统在城市环境中更加可靠且无侵入性。动态IPT是IPT的一项有趣改进:大规模使用电气化道路基础设施可能会改变用户对电动交通的认知,通过延长电池续航能力来提高市场渗透率。
然而,动态IPT仍在开发中,许多挑战尚未解决:
• 对于充电垫的尺寸设计,已提出了不同的解决方案:长轨道发射器(长度达数百米)[66]与小型圆形垫片 [37]以及重叠线圈[55]并存;
• 道路基础设施的集成和耐久性尚不明确,可能会干扰道路的正常使用寿命; 功率等级和频率范围(这会影响电力电子元件的选择) 仍在讨论中;
• 在整个充电阶段,必须评估电磁脉冲对车载电子部件的影响以及是否符合ICNIRP建议中关于人体暴露的规定[67],[68],[69];
• 当接近充电垫时,用于车辆检测和识别的不同技术以及连续线圈之间的切换正在研究中,例如使用辅助线圈 [70],[71],光学传感器,电力电子之间的无线或有线通信 [37]
• 检测靠近充电车道的异物是一个关键问题[72]。事实上,磁性和导电物体可能会改变磁场的形状,在感应电流的作用下发热,并影响系统性能以及带电部件附近区域的安全性[73]。
正如本文所述,许多参与者正在针对这些问题开发不同的解决方案,可能导致相互冲突的结果。标准化过程尚处于初期阶段,但总体趋势是复制静态IPT的程序和标准,以实现静态和动态系统之间的互操作性。尽管动态IPT仍存在不确定性,但该领域已获得大量私人和公共投资,显示出良好的前景。然而,由于道路基础设施成本高昂,市场最终渗透受到限制,这需要公共机构和政府的投资。

















 1225
1225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









