



环岛驾驶员注视行为分析
摘要
确定驾驶员情境意识是驾驶员表现分析中最困难的任务之一。感知作为驾驶员情境意识的第一层次,可能是唯一可用于客观量化驾驶员注意力分散的指标。在本文中,驾驶员感知被定义为驾驶员理解其运行环境及周边上下文信息的能力。确定驾驶员感知最可靠的方法之一是通过眼动追踪和注视集中度分析。
本研究采用一组精心选择的车内注视目标,用于判断驾驶员视线是否集中在道路上。驾驶员观察这些预定义注视目标的时间被用来表征其在正常驾驶过程中通过环岛时的驾驶员视觉行为。共有24名驾驶员完成了包含两个五出口双车道环形交叉路口的22公里路线,行驶环境涵盖城市和郊区交通。研究表明,在接近环岛时,驾驶员的注视方向和注视集中度常常偏离车辆的行驶方向,且部分驾驶员需要较长时间才能将视线重新回到车辆的行驶方向上。本研究基于以下前提:如果驾驶员未注视场景中的关键区域,则无法充分细致地感知这些区域的内容,从而影响安全驾驶。除非能够实时确定场景参数以及驾驶员的反应,否则无法准确判断驾驶员对场景的理解程度。
索引词
驾驶员分心,驾驶员注视行为,驾驶员注视行为,情境意识,环岛,半自动驾驶。
一、引言
情境意识(SA)是指驾驶员评估道路当前状况并适当规划下一步操作的能力[1]。驾驶中的情境意识要求驾驶员同时关注其行驶路线、附近交通、交通标志、道路地形、意外危险以及与这些因素相关的所有动态因素[2]。驾驶员的情境意识体现在其能力上,用于评估从环境中感知到的信息,并根据场景内容激活相应的车辆控制[3]。碰撞通常是由于驾驶员没有注视或无法注视(例如由于盲区或遮挡)其在不久的将来计划进入的道路区域所导致的。安全驾驶要求驾驶员必须始终准确且及时地掌握车辆周围区域的情况[4]–[6]。对车辆周围区域的了解来源于驾驶员中央凹视觉和周边视觉的结合。在环岛等复杂的道路交叉口,驾驶员有必要通过眼睛主动扫视整个场景(大约 180° 从左到右),以确保看到对向车流以及附近其他道路使用者。本文并不主张必须完整地以中央凹视野观察整个场景,但如果驾驶员未使用其中央凹或周边视觉观察过场景的某一部分,则他们对该部分场景的内容将毫无认知。此外,在环岛这类复杂且动态的场景中,实现场景理解所需的时间会增加[7]。
确定情境意识(SA)的最大挑战之一在于,无法客观地判断驾驶员在眼睛注视道路的情况下如何感知某一情境。如果不知道场景内容和驾驶员的认知状态(例如,如果驾驶员分心了,他们的眼睛可能正看着迎面而来的车辆,但未必会将该车辆识别为潜在危险源),就难以准确评估其情境意识。然而,可以客观判断的是,如果驾驶员未通过其驾驶相关视野(FRD)[8]感知到场景的某一部分,则他们对该部分的情境意识必然不足。周边视觉在驾驶员搜索特定信息时发挥着重要作用,但它无法提供安全驾驶所需的全部信息[9]。如果唯一可获得的驾驶员情境意识参数是驾驶员注视位置,那么可以合理假设:当他们没有注视具有信息性的区域时(例如,视线在驾驶舱内而非看向挡风玻璃外),他们对运行环境的了解程度可能低于注视信息性区域时的情况。然而,当他们的视线完全偏离场景的某个部分时(例如在接近和进入环岛时经常出现的情况),他们就不可能充分意识到车辆周围的环境,特别是在接近环岛这类高度动态的环境中。
如果已知驾驶员主车周围物体的真实位置,则可以确定是否驾驶员已朝该物体的方向看去。最常用且最受信任的情景意识模型是恩兹利模型[1],该模型定义了实现完整情景意识所需的三个参与层次的层级结构。情景意识的三个层次确定了驾驶员必须对信息进行感知、理解以及预测信息。恩兹利模型将感知描述为情景意识判断中的第一层次。多项研究发现,危险感知与事故卷入相关[10]–[13]。
在正常驾驶过程中,驾驶员应持续对车辆周围区域进行视觉扫描,以不断更新其情景意识(SA)。驾驶任务在很大程度上依赖于视觉信息[14]。视线离开驾驶任务会显著降低驾驶员感知车辆周围环境变化的能力,可能导致事故发生。驾驶员必须关注的核心区域包括车辆前方和侧后视镜。然而,驾驶员也会花费部分时间将视线转移至驾驶相关任务之外。众所周知,长时间将视线从主要驾驶任务上移开会降低驾驶员对道路及其他附近道路使用者的道路意识。维尔怀尔(Wierwille)开展的一项研究[15]发现,此类视线转移的持续时间通常在500到1600毫秒之间。观察到的模式表明,驾驶员通过在主要与次要任务之间分配视线转移,同时获取与驾驶任务和非驾驶任务相关的信息[15]。这些次要任务可能发生在车辆内部或外部。参与分散视觉注意力的活动,导致驾驶员视觉注意力偏离道路中央,可能影响车辆控制[16]。驾驶员分心是导致驾驶员错误并引发道路交通事故的主要原因之一[17]。根据当前趋势,到2030年,道路交通伤害很可能成为全球第五大死因[18]。美国国家公路交通安全管理局(NHTSA)开展的一项研究声称,16%至80%的交通事故直接或间接归因于驾驶员分心或注意力不集中[19]。
然而,并非所有偏离道路中央的视线转移都可视为注意力不集中。在正常驾驶过程中,驾驶员具有一定剩余视觉注意容量[20],可用于执行非驾驶任务,这些视线转移被称为“空闲”视线转移。这些空闲视线转移被认为是指向与非驾驶相关任务的视线转移。不同研究对驾驶员注视集中度报告了不同的百分比。例如,伯勒尔和福克斯[21]认为这类视线转移可能高达总时间的31%,Antin et al.[22]指出驾驶员最多会将其三分之一的视觉注意力分配给非驾驶相关任务,Green et al.[23]认为这一比例可高达40%,而休斯和科尔[20]则认为该比例可达50%。以往的研究主要集中在用户界面(如车载信息系统和车速表控制台)情境下的驾驶员注视行为。强制驾驶员将视觉注意力集中在用户界面上所得出的结果仅基于该界面,这会导致略微异常的注视行为。驾驶员通常会在车辆内外的观察区域之间转移视线,例如后视镜、仪表盘、车速表等,以及当中控台[8]未注视前方道路时。
确定驾驶员正在注视的位置对于理解注视行为至关重要,因为驾驶员的视线方向与注意力焦点密切相关[24]。在驾驶情境中,我们无法将驾驶员注视的位置与其感知的内容分离开来[9]。我们会关注特定物体或位置,以从场景中获取详细信息。分析眼睛的方向及其移动有助于评估驾驶员分心情况[25]。驾驶员视线方向既受意识决策的影响,也受到周边外部刺激(如物体移动或声音)的反应所影响[26]。在实路研究中,驾驶员倾向于注视道路弯道以及对向车流,以预判潜在风险[27],[28]。已有研究报道了两种用于确定驾驶员视线方向的方法:眼动追踪和头部追踪。这两种方法得出的结果不同[29],其中眼动追踪能更精确地指示真实的视线方向。驾驶员眼动追踪数据为测量驾驶员视线方向和注视时长提供了精确手段。眼动追踪还揭示了驾驶员注视行为中存在的重复模式,这些模式在执行自然任务时具有规律性和可重复性[30]。
环岛是城市化地区常见的环形交叉口控制形式[31]。当驾驶员进入环岛时,需要在对向车流、前方车辆、附近的行人和骑自行车者之间转移注意力。研究表明,与其他类型的交叉路口相比,环岛对机动车驾驶员更为安全。埃尔维克[32]指出,自引入环岛以来,车辆碰撞的发生率已显著降低。然而,环岛上的事故通常发生在车辆进出环岛时与骑自行车者或摩托车骑手相遇的情况下。
在大不列颠,环岛处涉及骑自行车者和汽车的碰撞事故比仅涉及汽车乘员的事故高出10到15倍。尽管环岛对汽车乘员更安全,但导致涉及骑自行车者的严重伤害事故数量显著增加[33]。考虑到暴露率,这也表明带有自行车道的环岛增加了骑自行车者与车辆发生事故的风险,主要原因是驾驶员未能注意到骑自行车者[34],[35]。在弗兰德斯‐比利时,几乎三分之一的环岛受伤事故报告中涉及骑自行车者[33]。一项调查研究显示,过去三年内有3%的爱尔兰 motorists 在环岛上发生过碰撞事故[36]。
在环岛行驶时的一个危险情况是,驾驶员进入环岛时需向右观察(英国/爱尔兰驾驶系统:靠左行驶),以寻找对向车流中的合适间隙。如果此时骑自行车者或摩托车手试图从车辆的另一侧超车,驾驶员可能无法察觉其存在,从而大大增加发生碰撞的可能性。由于驾驶员和其他道路使用者(骑车人和行人)都在移动,因此必须注意其他道路使用者可能进行的操作。这就要求驾驶员了解交通环境[37]中的变化。
本文采用了类似于自下而上方法的方法。不是根据道路内容,而是定义了车辆内部与驾驶任务相关的三维空间中的兴趣区域,以确定驾驶员是否在视觉上关注了这些区域。我们的方法不是通过测量驾驶员的感知来确定情境意识水平,而是在驾驶员接近和进入环岛时,确定其明显不具备完全情境意识的情况。
本研究使用了三台远程眼动仪来监测驾驶员视线,并通过监控驾驶员未注视的区域来衡量其注意力缺失。眼动追踪数据分析还借助车辆的控制区域网络(CAN总线),获取车辆加速度、速度、制动踏板压力、转向信号状态和方向盘角度的详细信息,以帮助研究驾驶员在环岛处的驾驶行为。
II. 方法论
测试车辆配备了3台眼动仪、一个GPS跟踪系统,并使用了车辆上的CAN总线传感器进行测试驾驶。在2017年夏季,招募了一组驾驶员在戈尔韦市(爱尔兰西部城市)内及周边的一条预设测试路线上正常驾驶。车载计算机记录并存储了数据。
使用三摄像头远程眼动仪记录实际道路驾驶员注视行为,以确定行程中每个时刻的驾驶员注视方向。附加设备被谨慎地安装在车辆内,以确保驾驶员在驾驶实验过程中不会受到干扰。与以往关于注视行为的研究类似,驾驶员视线方向通过三维空间中的向量表示,并映射到车辆内部的精确模型上。先前的研究采用类似方法将驾驶员视线识别为三维空间中的点[39],并进行注视方向分析[40]。
在车内定义了对应于主要驾驶相关区域的静态兴趣区域。兴趣区域对于建模驾驶员注视行为特别有用,尤其是在复杂操作和变道事件期间[21],[41]。
有少数研究采用了类似的方法论来展示在三维几何系统中的视线。张等[39]使用姿态无关的方法论,通过头部姿态估计了三维空间中的视线点,但该系统需要进行个体特定训练。维森特等[40]使用带有红外照明器的摄像头来估计驾驶员的头部姿态以及视线离开道路的情况。弗朗哥等创建了一个称为主要注意区的三维空间,该区域包含前挡风玻璃的中央部分,并估算了驾驶员视线落在主要注意区内或外的情况。该系统能够检测驾驶员是否向下看(估计驾驶员正在使用手机)或视线离开时眼睛离开道路的情况。阿赫斯特隆等[8]展示了一种类似的方法论,用于估计驾驶员在三维空间中的视线点。测试车辆为配备三摄像头系统以覆盖大范围头部运动,从而在三维空间中更精确地估计注视点。车辆内部创建了一个包含不同区域的三维模型,例如挡风玻璃、车速表、后视镜、仪表盘等。其中挡风玻璃区域被视为与驾驶相关的视野区域。驾驶员视线未落在挡风玻璃三维空间内的被视为脱离道路的视线。Fridman et al.[42]定义了微观和宏观注视,分别用于研究注视点的精确三维坐标和感兴趣区域的驾驶员注视行为。Lappi et al. [30]采用了一种方法论,对驾驶员在林区自然真实道路驾驶中的注视行为进行无约束的研究。本研究特别选择了感兴趣区域,以分析驾驶员在环岛处的注视行为。驾驶员的视线转移不受任何限制,从而特别反映出驾驶员在环岛处的真实注视行为。上述方法未能展示类似环岛的场景,在此类场景中驾驶员需要看向车窗外以获取驾驶相关信息。更准确地说,为了在不同类型的道路场景中实现精确的驾驶员注视估计,需要对区域进行更为准确的划分。
A. 注视目标
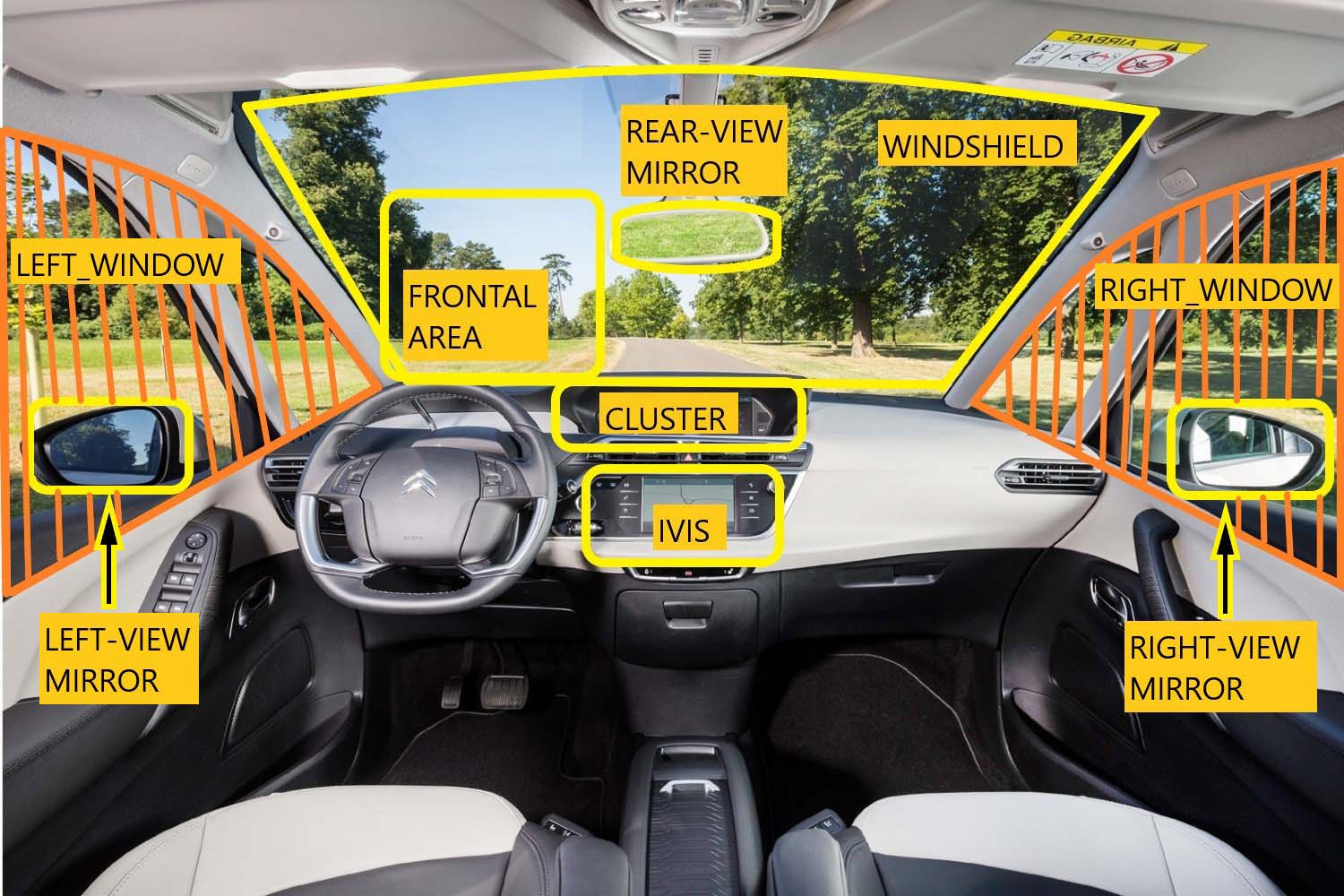
在常规驾驶过程中,驾驶员通常注视车辆前方区域,因为他们大部分时间都在向前行驶。为了观察车辆两侧和后方,驾驶员通常会使用后视镜或摄像头(本研究未考虑后视或侧视摄像头)。为了研究驾驶员在执行驾驶相关任务时的视觉行为,首先需要确定驾驶员应当注视的核心区域。本文定义了七个注视目标,用于研究驾驶员的注视方向和注意力集中情况:挡风玻璃、前方区域(挡风玻璃的一部分,指驾驶员直视车辆前方时的区域)、后视镜、右视镜、左视镜、仪表盘(车速表、导航、燃油量、指示灯)以及车载信息系统,如图1所示。左右车窗已被定义,但未包含在驾驶员相关的注视目标中。任何未落在上述目标上的视线都将被视为其他。仪表盘和车载信息系统被视为驾驶相关车辆资源,因为它们向驾驶员传递速度和地图信息。车内所有其他物品均视为与驾驶无关[8]。由于后视镜、车速表和导航控制台均为驾驶的一部分,因此它们都被视为驾驶相关注视目标,当驾驶员视线朝向这些区域时,将被视为其注意力的组成部分。
为了将视线对道路中央的关注与周边区域区分开,前方区域被定义为挡风玻璃的一个子区域,以确保对道路中央的视线转移始终与挡风玻璃其他部分的周边视线转移相区分。Ahlstrom 等人[8] 采用类似的概念,将挡风玻璃的一部分纳入驾驶员的前方注意区域,并将挡风玻璃远侧排除在中心聚焦区域之外。美国国家公路交通安全管理局[19]的指南规定,驾驶员在驾驶过程中必须保持对前方道路的视线关注。
这些驾驶相关目标在三维世界模型中使用世界坐标系(WCS)进行定义。世界坐标系(WCS)用于确定驾驶员注视行为与哪些真实世界物体相交。视线测量由三维空间中的注视原点和注视方向向量共同定义。注视方向向量是一个表示三维空间方向的单位向量。分别对左眼和右眼进行视线测量,并将其合并为位于左眼和右眼中间位置的虚拟眼的共识视线测量结果。记录滤波后的注视方向向量(双眼合并)与车辆三维模型之间的交点,从而生成注视目标时间序列。在测试驾驶过程中,驾驶任务要求驾驶员大部分时间保持抬头向前看,仅短暂地将视线转移至侧视镜。
B. 参与者
共有24名参与者参与了本研究。招募标准要求每位参与者在获得正式驾驶执照后至少拥有2年的驾驶经验,并且具有无扣分的良好驾驶记录。记录的最低年龄为22岁,最高年龄为77岁,大多数驾驶员的年龄范围在20至40岁之间。由于镜片会干扰视线判断,需要佩戴眼镜的驾驶员被排除在测试之外,但允许使用隐形眼镜的驾驶员参与。所有参与者均提供了完全知情同意,该研究已获得爱尔兰国立大学戈尔韦分校的伦理批准。
C. 路线选择
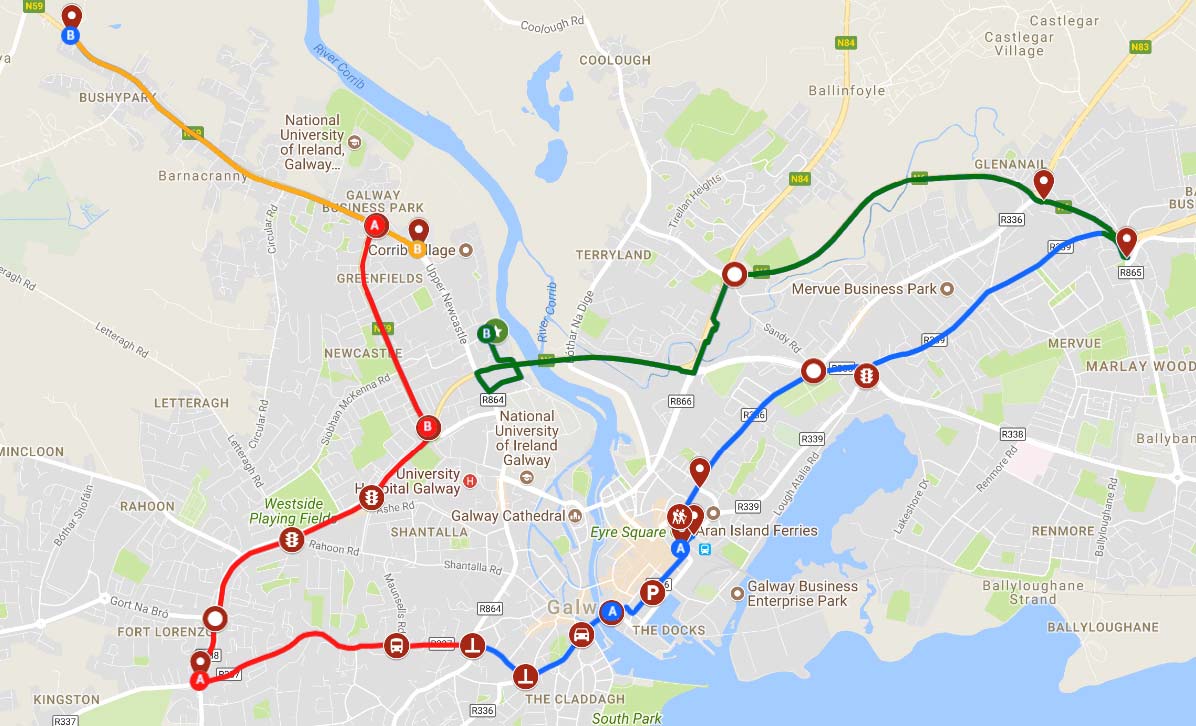
选择了一条22公里路线,以涵盖城市、郊区、乡村、双车道和密集城市交通区域,用于研究不同交通场景下的驾驶员注视行为。路线详情如图2所示。选定的测试路线包括两个传统的两车道五出口环岛,驾驶员通过第四个出口驶出环岛。所有测试均在上午10点至下午4点之间进行。每次测试前,驾驶员都有机会熟悉车辆。
D. 车辆传感器
一辆雪铁龙C4毕加索汽车配备了SmartEye Pro[43]眼动追踪系统,用于监测驾驶员注视行为和头部运动。如图3所示,在车辆仪表板上安装了三个远程眼动仪。使用两个红外照明器照亮驾驶员视网膜,以消除环境中的环境噪声。每次实验前都会针对每位驾驶员对系统进行校准。
车辆配备了CAN总线系统,该系统传输来自所有车辆传感器和系统的数据,包括本研究关注的油门踏板压力、车速、方向盘角度和制动压力等信号。CAN总线的信息由车内计算机进行记录和同步。眼动追踪数据与CAN总线系统数据相结合,可对驾驶行为进行详细研究。GPS系统与SmartEye追踪器同步,用于在路线上定位交叉路口、人行横道和环岛。

E. 预处理与数据库
CAN总线和安装的传感器连接到车辆内的计算机。所有车辆传感器和系统的数据以及定制安装的传感器数据均通过RTMaps进行时间戳记和记录。眼动追踪数据在车辆内的另一台计算机上处理数据,以确定注视向量与注视目标的交点。如果数据质量令人满意,但注视向量未与任何预定义的注视目标相交,则使用注视偏航角和注视俯仰角参数来确定注视向量方向,特别是在驾驶员视线与车辆侧窗交互时(图1中的棕色线区域)。
注视的提取仅基于落在预定义注视目标上的注视向量,这些目标是映射到车辆内部精确模型的三维空间中的点,而不是基于恩德利的情境意识模型[1]所定义的驾驶员在观察这些目标时所看到内容的更复杂概念。根据恩德利的情境意识模型,获得情景意识的第一步是感知环境中相关元素的属性。然而,仅通过观察驾驶员是否注视某个物体,无法判断其是否已感知到相关信息。
三、结果与讨论
通过视线判断驾驶员的情境意识水平,需假设驾驶员必须首先注视目标区域(前进时为前挡风玻璃区域,车辆后方和侧方时为车辆后视镜)。
A. 总体注视集中度
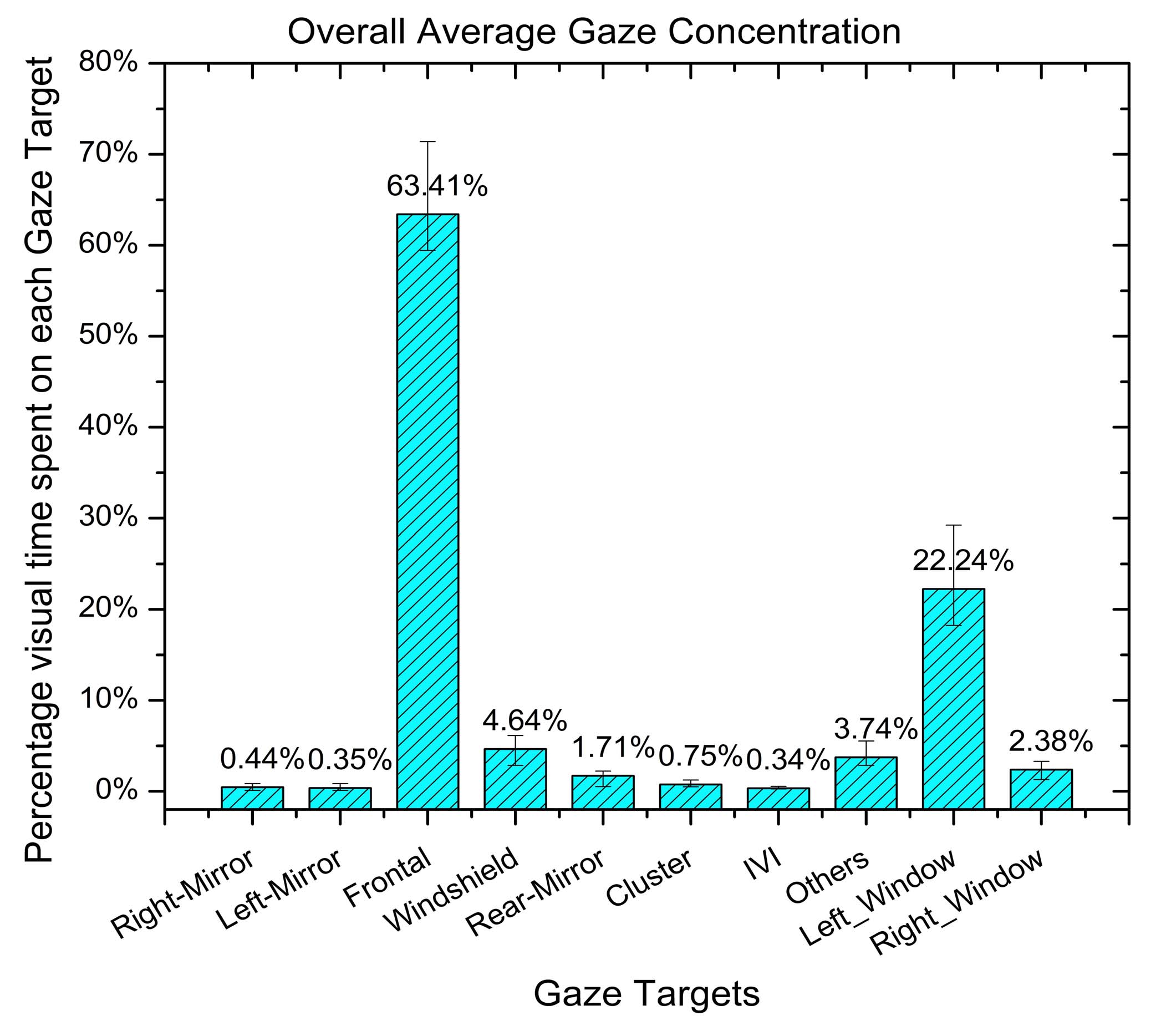
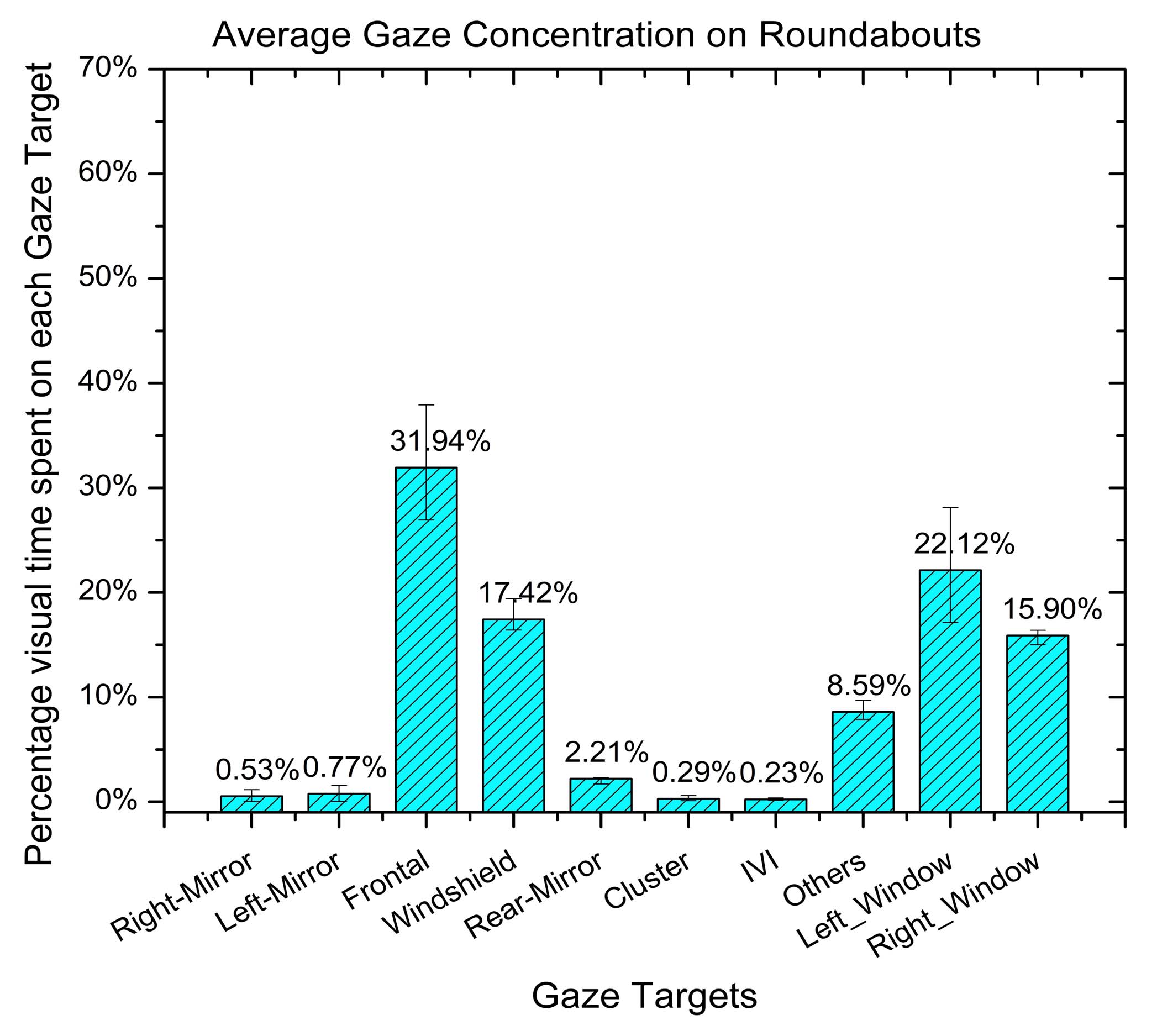
车辆内的注视目标被定义为驾驶员驾驶过程中最需要关注的区域。落在这些定义区域之外的视线被标记为“其他”,并记录在本研究的数据集中。为了确定驾驶员注视行为,计算了驾驶员注视预定义注视目标的总时间以及注视与驾驶无关目标的总时间。结果表明,每位驾驶员平均有28.36%的时间注视于与驾驶无关的区域。这段时间包括注视侧窗以及汽车内部的总视线时间。所有注视目标上的注视集中时间如图4所示。
注视目标上的注意力集中时间还可能受到实验设计的影响,例如,在某些研究中要求驾驶员与车载信息系统[21]进行交互或参与次要任务,这可能导致注视集中时间向特定注视目标发生转移。
在本研究中,要求参与者以他们自然的方式驾驶测试路线;未要求他们执行任何特定任务,也未要求他们关注车辆人机界面的特定区域。目的是确定他们的正常驾驶习惯。本研究中驾驶员对车载信息系统和仪表盘的注视集中度百分比分别为0.34%和0.75%,低于其他已发表的研究,那些研究中驾驶员需要执行特定任务,例如测试导航系统、为节能驾驶保持速度或相关研究[21],[44]。其余99%的总视线时间分布在前方区域、挡风玻璃和后视镜(左、右和后)、左_车窗、右_车窗以及其他区域。驾驶过程中,道路中央的视线转移占总视觉时间的63.41%。结果还显示,平均而言,驾驶员仅花费了4.64%的时间注视挡风玻璃区域(从前部区域移除后的挡风玻璃剩余部分)。
在整个测试时长中,驾驶员对后视镜的注视时间仅占很小的比例。在超车或变道时,驾驶员需要查看侧后视镜,因此预期对右侧后视镜的视线时间会比左侧后视镜更长。数据表明,驾驶员将总注视时间的0.45%用于观察右侧后视镜,而观察左侧后视镜的时间为0.35%。无论是左转还是右转,都需要查看后视镜,因此预期对后视镜的注视集中比率会高于任一侧后视镜,实际该比率为1.76%。
B. 环岛上的注视集中度
环岛是现代道路基础设施的重要组成部分,但与信号灯控制的交叉路口相比,对驾驶员而言更具挑战性。在英国和爱尔兰共和国,驶近环岛的驾驶员必须注意已经进入环岛并从右侧驶来的对向车流。在进入环岛时,车辆的朝向使得对向车流只能通过侧窗看到,这要求驾驶员将头部和眼睛转向右侧。为了充分了解周围环境,驾驶员必须将注意力重新转回到前挡风玻璃方向。本文指出,有相当数量的驾驶员在进入环岛时并未注视行驶方向,许多驾驶员在开始驶入环岛前后数秒内都没有进行观察。
对所有道路使用者而言,最大的危险在于驾驶员关注对向车流时间过长(长时间寻找对向车流中的可安全通过的间隙),进入环岛时,驾驶员未观察车辆左侧方向数秒,若此时左侧出现变化(例如有骑行者或行人从车辆左侧出现),则发生事故的风险会增加。

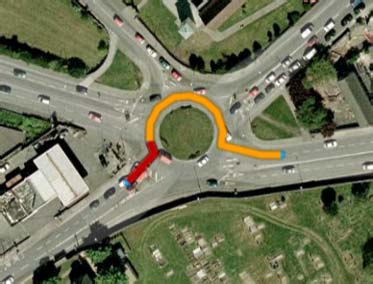
环岛A的平均通过时间为37秒,入口处的平均停车时间为11.75秒,但由于交通状况的变化,这些时间可能会有较大差异。环岛B的平均通过时间为27秒,平均停车时间为7秒。如图5所示,环岛A从入口到第四个出口的长度为130米,而如图6所示,环岛B从入口到第四个出口的总距离为135米。通过环岛的整体平均时间为58秒,偏差为7至15秒。
实验在夏季一天中的三个不同时间段进行。环岛的平均交通量随时间段的不同而变化。视频数据显示,在任意时刻,有4到7辆汽车在测试车辆后方等待进入环岛,同时在环岛内记录到10到12辆车辆。其他入口处等待进入环岛的其他车辆未包含在内。
在环岛上,车辆的左侧和右侧变得更为重要,因此如预期一样,驾驶员注视前部区域的时间比例降低。驾驶员在环岛操作时对挡风玻璃的注视集中度也上升至17.42%,如图7所示,而在正常驾驶(非环岛)情况下该数值仅为4.6%。
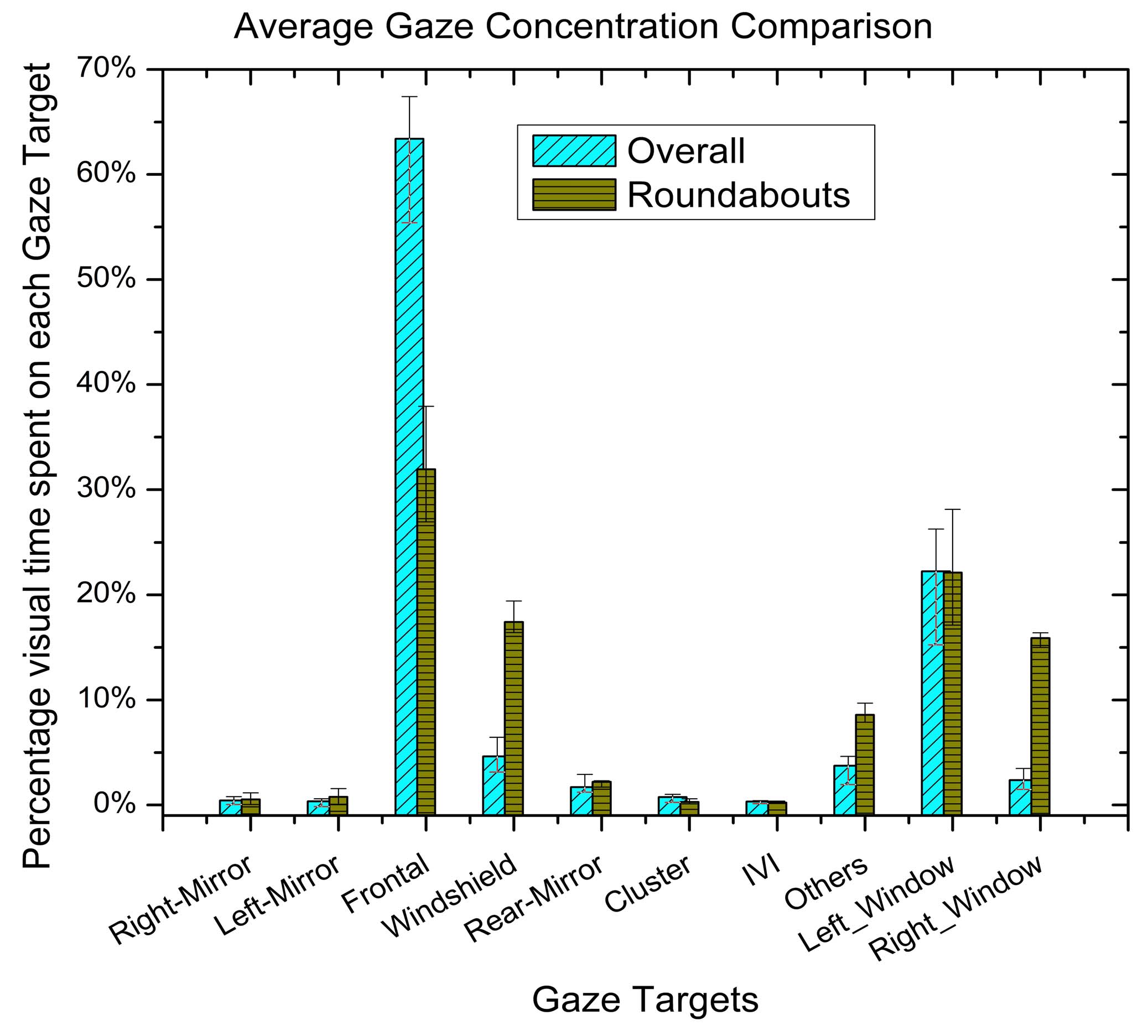
驾驶员在正常驾驶与环岛操作期间的注视行为对比可参见图8。比较正常驾驶和环岛操作时,可以发现注视前部区域和非驾驶相关区域的时间存在差异。另一个显著变化发生在驾驶员进入环岛时透过挡风玻璃观察的时间百分比。由于测试车辆为左舵车,驾驶员在观察环岛处的对向车流,这无意中增加了驾驶员在挡风玻璃上的注视集中度百分比。由于在环岛行驶时对向车流来自车辆右侧,因此左侧_窗的注视百分比在正常驾驶和环岛操作之间几乎保持不变。驾驶员对左侧车窗的视觉行为在环岛行驶与常规驾驶之间相似。两个环岛的各注视目标总注视百分比均呈现相似的趋势。由于环岛操作不需要驾驶员查看车载信息系统或仪表盘,因此在这两类目标上的注视时间百分比较低。侧窗区域通常与驾驶无直接关联,但在环岛行驶时变得非常重要,用于获取有关对向车流的关键信息。驾驶员对车辆两侧的注视集中度显著上升,从正常驾驶时的合计28%增加到在环岛行驶时的平均47%。驾驶员通常会看向车辆外部,此处为车辆右侧,通过车辆驶入环岛时,驾驶员对侧窗的注视集中度较高。特别是右_侧窗,在环岛处的注视集中度急剧上升,从2.38%升至15.9%。左_侧窗的百分比则变化不大,如图8所示。由于测试车辆的驾驶座位于左侧,而爱尔兰和英国的驾驶座位于右侧,因此左侧车窗的数值可能高于正常水平。
注视是用于研究驾驶员视觉行为的基本参数之一[47],[48]。注视是指眼睛短暂的停顿,在此期间大脑进行视觉信息的提取。ISO 15007‐1:2014标准[49]规定,注视时间在100毫秒到2000毫秒之间。由于没有确凿证据证明驾驶员看到并理解了他们所注视的区域,因此将最小注视时间视为人类存储视觉信息以供进一步处理的最低要求。在驾驶行为研究中,SmartEye Pro和Tobii等远程眼动仪制造商将200毫秒视为有效注视的最短视线时间,本研究也采用了相同的200毫秒要求。
C. 环岛上的最低注意力
美国国家公路交通安全管理局建议,驾驶员视线偏离道路中心的时间不应超过2秒[19]。为了安全驾驶,驾驶员应在驶入环岛前2秒内获取与驾驶相关的信息。由于目前尚无定量测量员认知状态的方法,本研究认为,当驾驶员决定进入环岛时,会踩下油门踏板。本研究仅评估了在环岛入口处停车的驾驶员,以确定其注视行为。
由于驾驶员必须向前行驶,因此在驶入环岛时,预计驾驶员会向前方观察。如果驾驶员在过去2秒或更长时间内未注视前方区域,且一直在观察右侧的对向交通,则认为该驾驶员未注意到车辆前方的情况,在过去2秒内车辆周围环境可能已发生变化;骑自行车者或行人等其他道路使用者可能已经出现。
D. 驾驶员在环岛上的注视行为
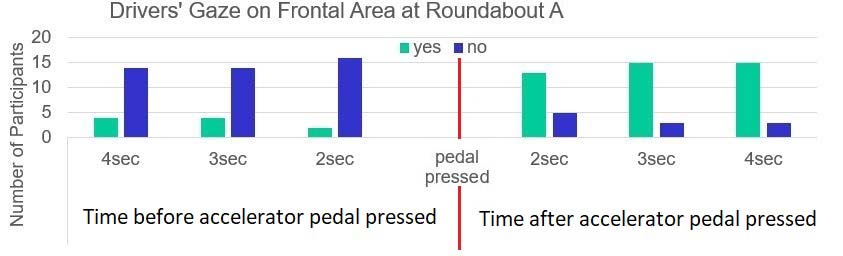
结果表明,在18名在环岛A入口处停车的驾驶员中,有16名驾驶员在发现对向车流中存在合适间隙后,立即踩下油门踏板驶入环岛,但在踩下加速踏板前2秒内并未注视前方区域(即无最小注视时间),如图9所示。由于车辆在环岛入口处已停止,踩下油门踏板时若未向前注视,可能会导致潜在的危险情况。由于踩下油门踏板与车辆开始移动之间存在1.4秒的延迟,因此假设驾驶员仍有约2秒的时间可在车辆获得显著前进动量之前将视线重新回到前方区域。观察发现,部分驾驶员在驶入环岛时向前注视时间不足2秒(通常远长于2秒)。向前注视的时间定义为从首次踩下油门踏板到首次获得前方区域注视点之间的时间间隔。
为了确定驾驶员踩下加速踏板前最后一次注视前方区域的时间,将时间窗口从2秒扩展至踩下加速踏板前后3秒和4秒的时间段。环岛A上驾驶员注视行为的结果已在图9中展示。
观察发现,有14名驾驶员在决定将车辆驶入环岛前3秒内未对前方区域进行视觉关注,即车辆开始向前行驶前,驾驶员对前方区域的注视时间未达到最小注视时间200毫秒。同样数量的驾驶员在向前行驶前4秒内未查看前方侧方区域。数据显示,每位驾驶员仅通过观察车辆一侧的空间信息,并依赖记忆中存储的车辆另一侧先前掌握的信息来决定继续前进。未能观察到车辆另一侧的情况会使其他道路使用者处于危险之中。
观察到踩下加速踏板后的2秒、3秒和4秒时间窗口,结果表明,驾驶员一旦开始向前移动,许多人会迅速将视线转回前方区域。还观察到,有13名驾驶员在决定进入环岛后的两秒内即将视线转回前方区域。在之前做出决策前连续2秒未注视前方区域的16名驾驶员中,共有13名驾驶员在踩下加速踏板后的接下来2秒内将注意力重新转回前方区域。观察发现,有3名驾驶员在踩下油门踏板4秒后仍未对前方区域保持最小注视时间。视频和头部追踪证据显示,这些驾驶员继续朝某个方向看去,在车辆开始移动后的一段时间内,对向车流来自右侧。观察发现,交通较为密集,这些驾驶员在驶入环岛时持续关注对向车流,但未及时获取车辆前方或左侧的信息。
在环岛B上也观察到了类似的行为模式,如图10所示,19名驾驶员中有15名在踩下油门踏板前,对前方区域的注视时间不足2秒。其中14名驾驶员在两秒内将注意力重新转回前方区域。研究发现,许多驾驶员仅通过寻找对向车流中的合适间隙来决定驶入环岛,而在踩油门踏板时忽略了车辆左侧区域。从图9和图10中可以观察到,大多数驾驶员在2秒内重新将注意力转回前方。在环岛B处,所有驾驶员均在4秒内将注意力重新回到前方。
车辆速度在驾驶员首次对前方区域进行最小注视时被记录,如图11所示。车辆速度表明,在每个环岛上有5名驾驶员在首次完成最小向前注视时,车速达到或超过10 km/h,其中有2名驾驶员的车速超过20 km/h。周边视觉未被考虑,因为周边视觉不构成注视[50]。当物体的影像落在视网膜的一个小区域——中央凹上时,该区域覆盖中心视野的2.5°,其感知效果优于落在中央凹区域之外的物体[51]。当人类视觉系统检测到周边区域中某个可能需要关注的区域时,会通过移动眼球位置将其带入中央凹视觉范围内[52]。
在本研究中,为了确定驾驶员对前方区域的真实注视,需要双眼的注视向量都落在注视目标上。必须确认双眼均在观察同一区域。那么可以有把握地推断,驾驶员已将其注意力转移到了该注视目标上。本研究表明,如果驾驶员曾在某一区域内注视,则其更有可能注意到了该区域内的某些事物。布朗等人证明,感知与记忆中的先验知识紧密相关[52],因此,如果驾驶员在2秒内未将注意力重新转回车辆行驶方向,则其他道路使用者可能处于危险之中。
驾驶培训程序建议,驾驶员在驶入环岛前应从车辆的左侧到右侧进行视觉扫描。然而,正如本研究所示,驾驶员往往过于依赖记忆或仅关注一个方向,从而忽视了这些推荐做法。根据目前的分析,建议需要附加技术来支持驾驶员在环岛等场景下的操作。当前的现代车辆配备了多种传感器,可用于在驾驶员对周围情况缺乏意识的场景中提醒驾驶员。关于其他道路使用者对驾驶员注视行为的影响,还需进一步调查,目前该项工作正在进行中。
IV. 结论
通过记录驾驶过程中的眼动追踪数据,对驾驶员注视行为进行了观察和分析。已定义并映射了一组精心选择的注视目标到车辆内部。在环岛上对驾驶员的注视行为进行了观察,特别是在驾驶员并入交通流进入环岛时。观察发现,许多驾驶员会从右侧观察对向车流,假设在其前方和左侧的空间信息在决定前进时未发生变化。当驾驶员接近和进入环岛时,侧窗变得更为重要。驾驶员在驶入环岛时对车辆前方缺乏感知,这对其他道路使用者构成了重大威胁。
需要为驾驶员提供支持,以监控其视线未关注的车辆周围区域,从而可能防止驾驶员采取可能使自己或他人处于危险的行为。配备传感器的车辆可同时监测驾驶员视线,并结合车辆外部传感器对其他道路使用者进行监测,这有助于开发高级驾驶辅助系统,以帮助驾驶员实现安全驾驶。可以开发一种预警系统,帮助驾驶员将其视线转移到需要更多注意的区域。目前正在进行针对其他交通场景(如人行横道、T型交叉路口和左转)的进一步研究,以调查驾驶员在其他复杂的交叉路口和交通状况下的警觉状态。

















 1665
1665

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









