



使用八叉树进行空间分区和搜索操作
八叉树是一种基于树的数据结构,用于管理稀疏的三维数据。每个内部节点都有八个子节点。在本教程中,我们将学习如何使用八叉树对点云数据进行空间分区和邻域搜索。特别是,我们将讲解如何执行 "体素内邻居搜索"、"K 最近邻搜索 "和 "半径内邻居搜索"。
终端输出:
K nearest neighbor search at (54.6875 786.5 19.9375) with K=10
88.75 906.094 56.875 (squared distance: 16827.3)
151.125 886.562 83.8438 (squared distance: 23396.7)
61.9688 932.469 97.75 (squared distance: 27414.7)
188.812 711.719 109.156 (squared distance: 31541.7)
238.906 757.594 55.4688 (squared distance: 36034.6)
217.594 874.125 82.25 (squared distance: 38099.4)
170.062 628.906 0.28125 (squared distance: 38533.5)
173.75 616.719 16.2812 (squared distance: 43014.9)
85.6875 675.156 193.375 (squared distance: 43439)
96.0938 816.375 222.5 (squared distance: 43638.6)
Neighbors within radius search at (54.6875 786.5 19.9375) with radius=113.641这段代码是使用C++编写的,并且利用了PCL(Point Cloud Library,点云库)来进行点云数据的搜索和处理。主要内容包括初始化点云数据,构建八叉树索引,并通过不同的搜索方法来查询点云数据。
具体来说,这段代码首先包含本PCL库中处理点云和八叉树搜索的相关头文件,还有标准输入输出头文件和向量处理头文件。在 main() 函数中完成了以下几个步骤:
初始化一个点云对象
cloud。随机生成1000个点的点云数据,这些点的X、Y、Z坐标值是通过随机数生成的。
创建一个八叉树搜索对象
octree,并设置其分辨率为128。将生成的点云数据添加到八叉树索引中。
生成一个随机的搜索点
searchPoint。执行体素内的邻域搜索,将搜索到的点索引存储在
pointIdxVec向量中,并打印出这些点的坐标。执行K近邻搜索,找到距离
searchPoint最近的K个点(这里K设置为10),并打印出这些点的坐标和它们到搜索点的平方距离。最后执行半径内的邻域搜索,设置一个随机的搜索半径
radius,查找在这个半径内的所有点,并打印出它们的坐标和到搜索点的平方距离。
这段代码演示了PCL中八叉树的基本使用方法,包括八叉树的构建、体素内搜索、K近邻搜索和半径内搜索。八叉树是一种用于空间划分和快速点查找的数据结构,在点云数据处理中广泛应用。
// 包含PCL(点云库)和标准输入输出库头文件
#include <pcl/point_cloud.h> // 引入PCL库的点云定义头文件
#include <pcl/octree/octree_search.h> // 引入PCL库的八叉树搜索相关头文件
#include <iostream> // 引入标准输入输出流库,用于控制台输入输出
#include <vector> // 引入STL的vector容器类
#include <ctime> // 引入C标准库时间函数
int main ()
{
// 初始化随机数种子
srand ((unsigned int) time (NULL));
// 创建一个新的点云指针
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
// 生成点云数据
// 设定点云宽度为1000,高度为1,表示所有点在同一行
cloud->width = 1000;
cloud->height = 1;
// 调整点云总点数
cloud->points.resize (cloud->width * cloud->height);
// 遍历并随机生成点云中的点
for (std::size_t i = 0; i < cloud->size (); ++i)
{
(*cloud)[i].x = 1024.0f * rand () / (RAND_MAX + 1.0f);
(*cloud)[i].y = 1024.0f * rand () / (RAND_MAX + 1.0f);
(*cloud)[i].z = 1024.0f * rand () / (RAND_MAX + 1.0f);
}
// 设置八叉树的分辨率
float resolution = 128.0f;
// 创建八叉树并设置分辨率
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree (resolution);
// 设置输入点云到八叉树
octree.setInputCloud (cloud);
// 从输入点云中添加点到八叉树
octree.addPointsFromInputCloud ();
// 创建并随机生成一个搜索点
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand () / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand () / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand () / (RAND_MAX + 1.0f);
// 体素内近邻搜索
std::vector<int> pointIdxVec;
// 如果搜索点的体素内存在点,则输出这些点的坐标
if (octree.voxelSearch (searchPoint, pointIdxVec))
{
std::cout << "Neighbors within voxel search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z << ")"
<< std::endl;
// 遍历所有在同一体素中的点并输出它们的坐标
for (std::size_t i = 0; i < pointIdxVec.size (); ++i)
std::cout << " " << (*cloud)[pointIdxVec[i]].x
<< " " << (*cloud)[pointIdxVec[i]].y
<< " " << (*cloud)[pointIdxVec[i]].z << std::endl;
}
// 最近的K个邻居搜索
int K = 10;
std::vector<int> pointIdxNKNSearch;
std::vector<float> pointNKNSquaredDistance;
// 进行K邻近搜索,并输出搜索点的坐标以及K的值
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
// 如果找到了则输出每一个近邻点的坐标和它们的平方距离
if (octree.nearestKSearch (searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (std::size_t i = 0; i < pointIdxNKNSearch.size (); ++i)
std::cout << " " << (*cloud)[ pointIdxNKNSearch[i] ].x
<< " " << (*cloud)[ pointIdxNKNSearch[i] ].y
<< " " << (*cloud)[ pointIdxNKNSearch[i] ].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
// 半径内邻居搜索
std::vector<int> pointIdxRadiusSearch; // 用于存储搜索到的点的索引
std::vector<float> pointRadiusSquaredDistance; // 用于存储搜索到的点到搜索点的平方距离
float radius = 256.0f * rand () / (RAND_MAX + 1.0f); // 生成一个随机的搜索半径
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl; // 输出搜索信息,包括搜索点坐标和搜索半径
if (octree.radiusSearch (searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
// 如果搜索到了邻居点,则输出这些点的信息
for (std::size_t i = 0; i < pointIdxRadiusSearch.size (); ++i)
std::cout << " " << (*cloud)[ pointIdxRadiusSearch[i] ].x
<< " " << (*cloud)[ pointIdxRadiusSearch[i] ].y
<< " " << (*cloud)[ pointIdxRadiusSearch[i] ].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}octree.voxelSearch(searchPoint, pointIdxVec)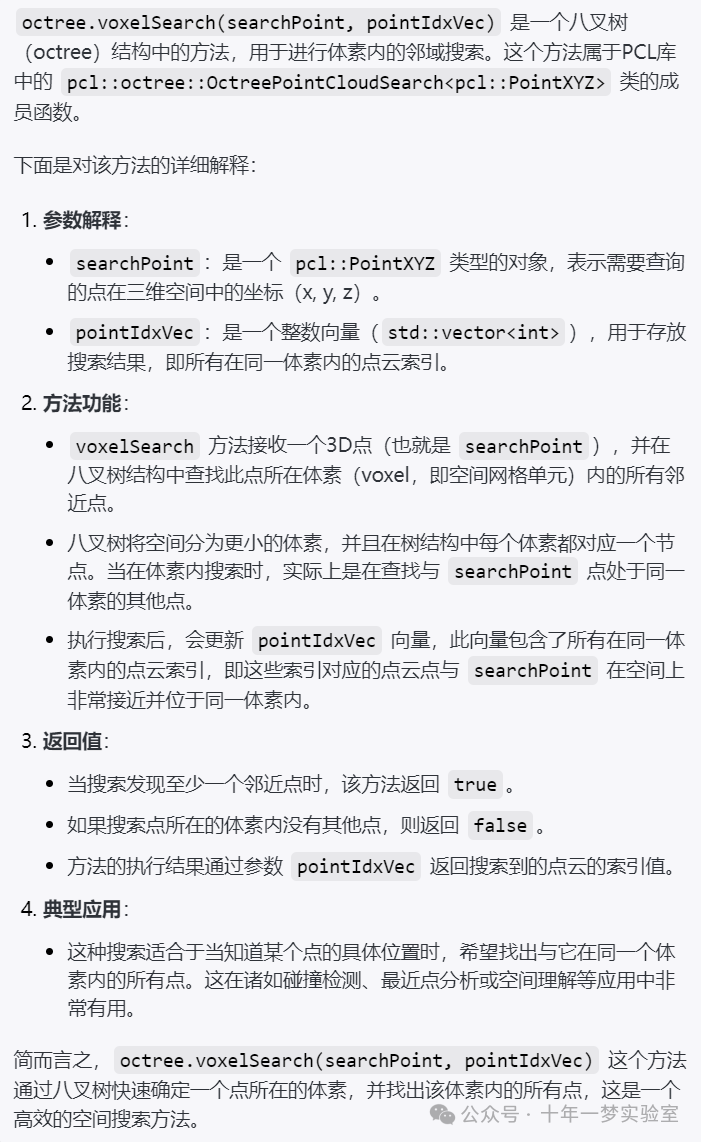
octree.nearestKSearch(
searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance)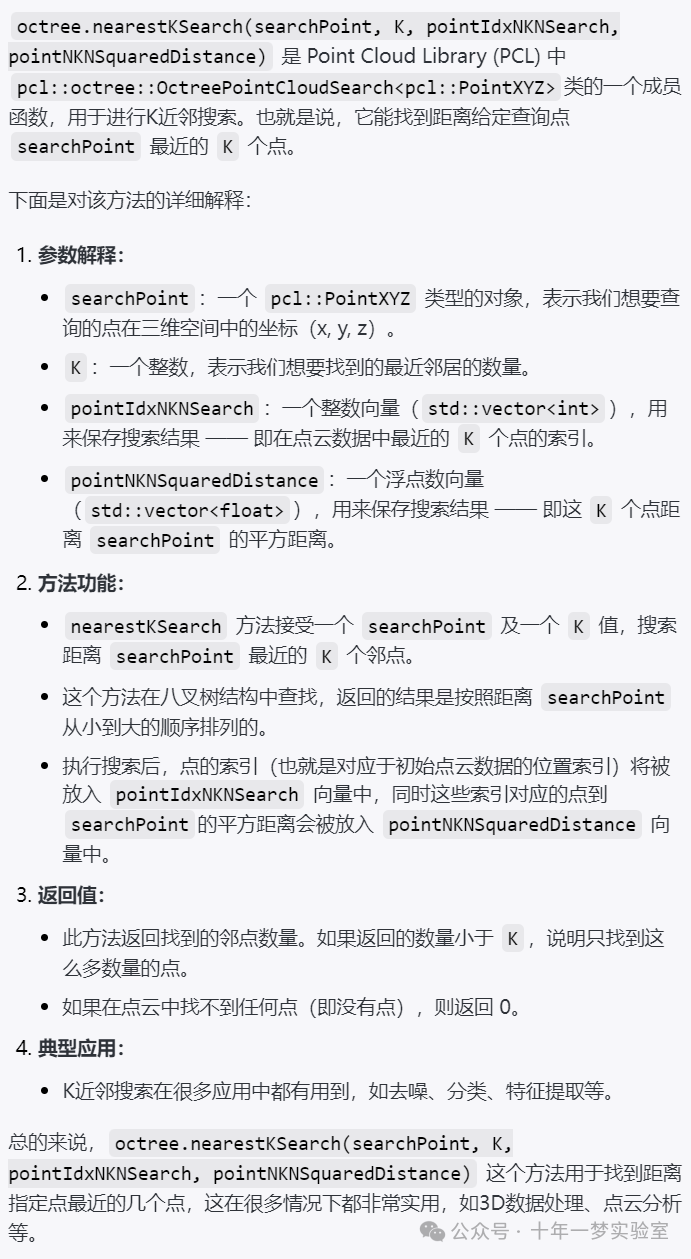
octree.radiusSearch(
searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance)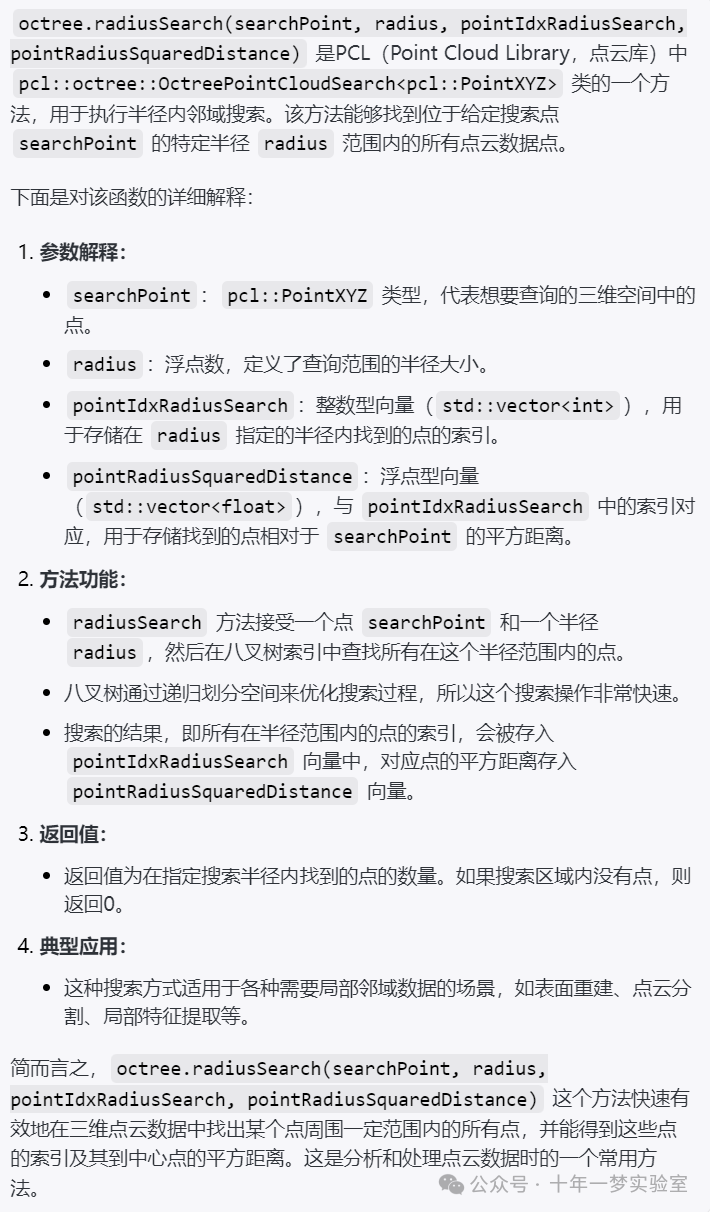

















 3789
3789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









