



 本文作者分享了如何设计并3D打印了一个SPM,作为机械臂的末端执行器,使用BLDC电机和编码器,通过Unity在Linux上进行设置和运动测试。作者还计划公开模型和硬件清单,受到PollenRoboticsOrbita项目启发。
本文作者分享了如何设计并3D打印了一个SPM,作为机械臂的末端执行器,使用BLDC电机和编码器,通过Unity在Linux上进行设置和运动测试。作者还计划公开模型和硬件清单,受到PollenRoboticsOrbita项目启发。

组装视频
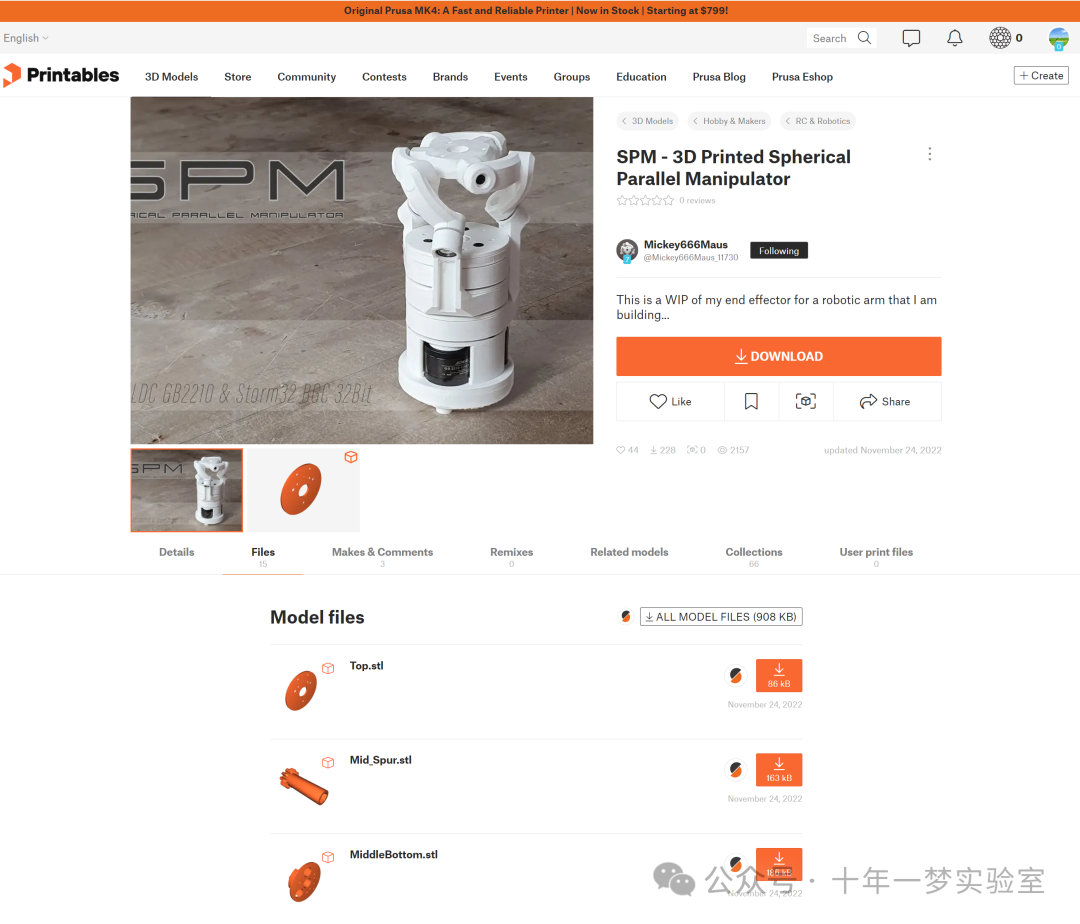
该 3D 打印执行器将用作我的机械臂的末端执行器,其他用例可能用于相机万向节或敏捷眼!
我计划发布打印文件并将更新零件清单......
更多内容敬请关注!
硬件包括
3 个 EMAX GB2210 BLDC
3 个 AS5048A 编码器
和
Storm32 BGC 32位MCU
使用轴承
3 个 61709-ZZ 45x55x6 毫米
12 个 MR128-2RS 8x12x3.5 毫米
6×679 9×14×3毫米
Richard Unger 的 SimpleFOC 和 Python 编码
/ @runger1设置和运动测试
在 Linux 笔记本电脑上使用 Unity 对我的 SPM 设计进行设置和运动测试!
该 3D 打印执行器将用作我的机械臂的末端执行器,其他用例可能用于相机万向节或敏捷眼!
我受到 Pollen Robotics Orbita 联合项目的启发,但由于没有驱动它的板,所以我决定自己构建一个。
该 SPM 在水平轴上具有无限的旋转自由度,由三个 BLDC 电机驱动。IK 在 Unity 中计算并通过串行端口或 Flask 服务器发送到开发板。
Storm32 固件由 runger1101001 提供
https://github.com/runger1101001
我计划发布打印文件并将更新零件清单......
更多内容敬请关注!
0:00-介绍
0:30 - Linux 上的 Unity
2:45 - 硬件设置
3:15 - 软件设置
3:30 - 未来想法 - VR 控制
3:50 - 未来的想法 - 机械臂
4:05 - 动作测试
硬件包括
3 个 EMAX GB2210 BLDC
3 个 AS5048A 编码器
和
Storm32 BGC 32位MCU
使用轴承
3 个 61709-ZZ 45x55x6 毫米
12 个 MR128-2RS 8x12x3.5 毫米
6×679 9×14×3毫米3D打印模型下载地址:
https://www.printables.com/model/323998-spm-3d-printed-spherical-parallel-manipulator/files
该作者主页:
https://www.youtube.com/@swannschilling474/featured
https://www.printables.com/@Mickey666Maus_11730


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









