



C++示教器
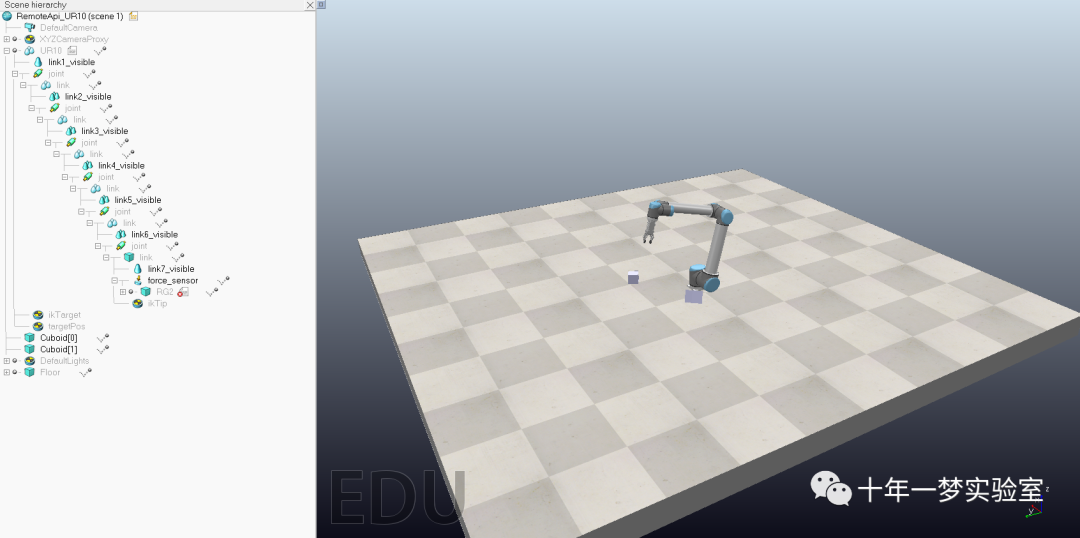
场景截图
视频演示
笔记:
一、用于 VS 2022 .NET 框架的 C++ Windows 窗体
通过用 C++ 编写的 Windows 窗体项目扩展 Visual Studio 2022 。此类项目创建的应用程序具有图形用户界面。它们基于 .NET Framework。您可以使用所有常见的 Windows 控件,如按钮、菜单、文本框等。
与传统 C++ 程序的主要区别在于,它不是使用控制台进行用户交互
cout << "Hello world" << endl;
您可以使用 Windows 控件,例如 TextBox
textBox1->AppendText("Hello World");
安装扩展 https://marketplace.visualstudio.com/items?itemName=RichardKaiser.cppclrwinf
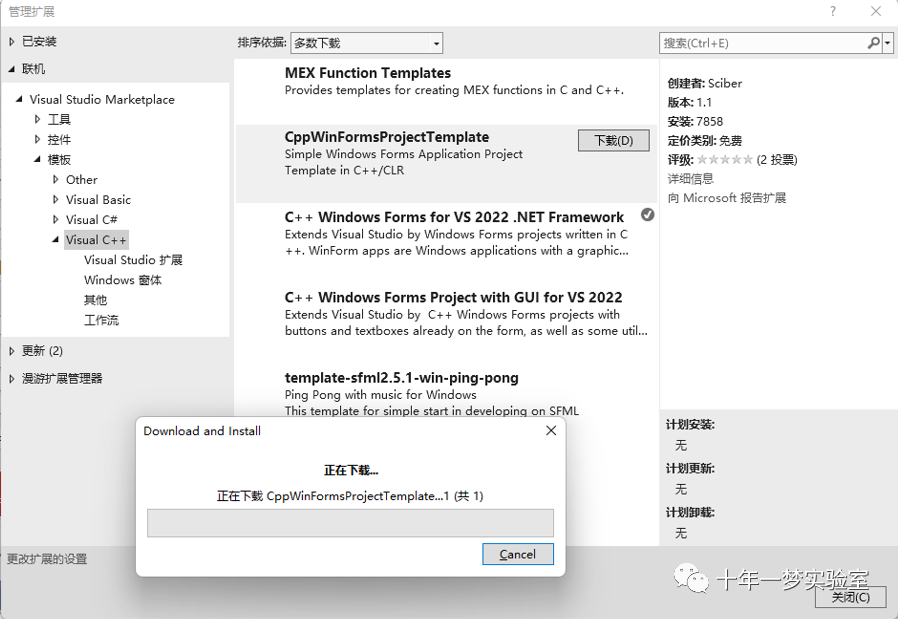

创建项目时选择CppCLR_WinFormsProject
二、coppeliasim类是对remoteApi的封装,可以操作机器人、获取传感器数据.通过调用脚本函数进行任何可能的操作。
.h文件:
#pragma once
/*
NON_MATLAB_PARSING
MAX_EXT_API_CONNECTIONS=255
_CRT_SECURE_NO_WARNINGS
DO_NOT_USE_SHARED_MEMORY
*/
#include <stdlib.h>
#include <iostream>
#include <windows.h>
#include <stdio.h>
#include <process.h>
#include <fstream>
//#include <msclr\marshal_cppstd.h>
extern "C" {
#include "extApi.h"
//#include "simConst.h"
}
using namespace std;
#define RAD_TO_DEG (180/3.141592)
#define DEG_TO_RAD (3.141592/180)
//检索全局句柄 Retrieve global handle;
class CoppeliaSim {
public:
bool connected;//连接状态
int clientID;//客户端id
public:
bool connect(int port);//连接
void disconnect(int clientID);//断开连接
void startSimulation();//开始仿真
void stopSimulation();//停止仿真
};
//类:机器人 Class Robot
class CoppeliaRobot: public CoppeliaSim{
public:
void init(string robot_name);//初始化:机器人名称
void setPosition(float pos[6], bool wait);//设置位置
void setPosition(float x, float y, float z, float w, float p, float r, bool wait);//设置tcp位置 wait
void setPosition(float x, float y, float z, float w, float p, float r);//设置tcp位置
void setJointPosition(float joint[6], bool wait);//设置关节位置
void setJointPosition(float J1, float J2, float J3, float J4, float J5, float J6);//设置所有关节位置
void setJointPosition(int num, float tetha); // 设置单关节位置 Set single joint position
void setPosition2(float pos[6]); //直接设定物体位置(无速度控制) Direct set object position (no speed control)
void readCurrentJointPos(float joint_pos[6]);//读取当前关节位置
void readObjectPosition(string object_name, float current_pos[6]);//读取对象位置
void enableIk(bool enable);//启用IK
bool isMoving();//移动中
void setSpeed(float vel, float ang_vel);//设置速度
void gripperCatch();//夹爪抓取
void gripperRelease();//夹爪释放
void readPosition(float pos[6]);//读取tcp位置
void readForce(float force[6]);//读取六维力
void getObjectMatrix(float M[4][4]);//获取对象位姿矩阵
public:
int joint_handle[6];//机器人6个关节句柄
int forceSensor_handle;//力传感器句柄
simxChar * script_name;//脚本名称
string scriptName;//脚本名
//Ik Handle IK句柄
int ikTargetHandle;//ik目标句柄
int ikTipHandle;//ik tip句柄
int robotHandle;//机器人句柄
int moving;//移动状态
int ftHandle;//力传感器句柄
int targetPosHandle;//目标位置句柄
float __force[3];//三维力
float __torque[3];//三维力矩
float __pos[3];//位置
float __rot[3];//姿态
int __cnt; //输出位置的数量
float* __position;//位置指针
float* __jointpos;//关节位置指针
simxUChar state;//力传感器状态
};
//类:力传感器 Class Force Sensor
class CoppeliaForce{
public:
void init(int clientID, simxChar * obj_name);//初始化力传感器:获取其句柄
void read(float force[6]);//读取六维力
private:
int forceHandle;//力传感器句柄
int clientID;//客户端id
};.cpp文件:
#include "coppeliasim.h"
#include <windows.h>
// Connect to coppelia sim, defaulf port: 19997
/////////////////////////////////////////////////////////////////////
bool CoppeliaSim::connect(int port)
{
if (!connected) {
simxFinish(-1);//最后一个要调用的函数
this->clientID = simxStart((simxChar*)"127.0.0.1", port, true, true, 2000, 5);//连接服务器
if (this->clientID != -1) {
this->connected = true;
printf("> CoppeliaSIM connection success! Client ID : %d \n", clientID);
// Start simulation:
//simxStartSimulation(clientID, simx_opmode_oneshot_wait);
return true;
}
else {
printf("> Simxstart failed!!! \n");
}
}
else {
printf("> CoppeliaSim already connected. Please disconnect first. \n");//已经连接
}
return false;
}
////////////////////////////////////////////////////////////////////
//断开与CoppeliaSim服务器的连接
void CoppeliaSim::disconnect(int clientID)
{
this->connected = false;
simxFinish(clientID);
}
// 开始仿真Start Simulation
void CoppeliaSim::startSimulation() {
simxStartSimulation(clientID, simx_opmode_blocking);
}
//停止仿真
void CoppeliaSim::stopSimulation() {
simxStopSimulation(clientID, simx_opmode_blocking);
}
// 力传感器初始化,获取其句柄 Force Sensor
void CoppeliaForce::init(int clientID, simxChar * obj_name)
{
this->clientID = clientID;
simxGetObjectHandle(this->clientID, obj_name, &forceHandle, simx_opmode_oneshot_wait);//获取力传感器句柄
printf("__INFO___: Coppeliasim force sensor handle ID : %d \n", forceHandle);
}
//读取六维力:力和力矩
void CoppeliaForce::read(float force[6])
{
simxUChar state;//状态
float _torque[3] = {0 ,0 ,0 };//三维力矩
float _force[3] = {0, 0, 0,};//三维力
simxReadForceSensor(this->clientID, forceHandle, &state, _force, _torque, simx_opmode_continuous);//读取力传感器状态
for (int i = 0; i < 3; i++) {
force[i] = _force[i];
}
for (int i = 0; i < 3; i++) {
force[i + 3] = _torque[i];
}
// printf("Force Data: %.3f %.3f %.3f \n", force[0], force[1], force[2]);
}
//机器人类 Robot Class
///////////////////////////////////////////////////////////////////
//启用IK
void CoppeliaRobot::enableIk(bool enable)
{
int dataSend;//要发送的数据
if (enable) dataSend = 1;//启用ik,发送1
else dataSend = 0;//不启用ik,发送0
//调用脚本函数
int result = simxCallScriptFunction(
clientID,
script_name, // 关联对象脚本的名称the name of the associated obejct script
sim_scripttype_childscript, // 脚本的句柄 the handle of the script
"enableIk", // 函数名称 Function name
1, &dataSend, //输入的int数量,输入的int指针 inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot);//单次模式
}
// Robot initialization: retreive some handles:
//////////////////////////////////////////////////////////////////////
//机器人初始化:检索一些句柄:
void CoppeliaRobot::init(string robot_name) {
string temp("/" + robot_name);
scriptName = temp;
string target_obj_name("./" + robot_name + "/ikTarget");//ik目标名称 字符串
string tip_obj_name ("./" + robot_name + "/ikTip");//iktip名称 字符串
string ft_obj_name ("./" + robot_name + "/force_sensor");//力传感器名称 字符串
string targetPos_obj_name("./" + robot_name + "/targetPos");//目标位置对象名称
simxGetObjectHandle(clientID, robot_name.c_str(), &robotHandle, simx_opmode_blocking);//获取机器人句柄
simxGetObjectHandle(clientID, target_obj_name.c_str(), &ikTargetHandle, simx_opmode_blocking);//获取目标对象句柄
simxGetObjectHandle(clientID, tip_obj_name.c_str(), &ikTipHandle, simx_opmode_blocking);//获取tip句柄
simxGetObjectHandle(clientID, ft_obj_name.c_str(), &ftHandle, simx_opmode_blocking);//获取力传感器句柄
simxGetObjectHandle(clientID, targetPos_obj_name.c_str(), &targetPosHandle, simx_opmode_blocking);//获取目标位置句柄
cout << "\n\nSimulation properties:" << endl;
cout << "Robot Handle: " << robotHandle << endl;
cout << "ikTarget : " << ikTargetHandle << endl;
cout << "ikTip : " << ikTipHandle << endl;
cout << "Force Sensor: " << ftHandle << endl;
//启动流数据事务:Start Stream data routine:
simxReadForceSensor(clientID, ftHandle, &state, __force, __torque, simx_opmode_streaming);//获取力传感器数据
simxGetIntegerSignal(clientID, "moving_status", &moving, simx_opmode_streaming);//获取整型信号 moving_status。
//simxGetObjectPosition(clientID, ikTipHandle, robotHandle, __pos, simx_opmode_streaming);
//simxGetObjectOrientation(clientID, ikTipHandle, robotHandle, __rot, simx_opmode_streaming);
// 位置数据流 Stream position data:
simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script 关联的对象脚本名
sim_scripttype_childscript, // the handle of the script 脚本类型:子脚本
"remoteApi_getPosition", // Function name 调用脚本的函数名remoteApi_getPosition
0, NULL, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
&__cnt, &__position, // outFloatCnt, outFloat //浮点数量,浮点数指针
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_streaming);//流操作模式
// 关节位置数据 Stream joint position data:
simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_getJointPosition", // Function name 脚本的获取关节位置函数
0, NULL, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
&__cnt, &__position, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_streaming);
}
//读取力传感器数据
void CoppeliaRobot::readForce(float force[6]) {
simxReadForceSensor(clientID, ftHandle, &state, __force, __torque, simx_opmode_buffer);
for (int i = 0; i < 3; i++) {
force[i] = __force[i];
force[i + 3] = __torque[i];
}
}
// 设置机械臂位置Set robot arm position:
// ////////////////////////////////////////////////////////////////////
void CoppeliaRobot::setPosition(float pos[6], bool wait)
{
setPosition(pos[0], pos[1], pos[2], pos[3], pos[4], pos[5]);
if (wait){
while (isMoving());
}
}
//设置位置
void CoppeliaRobot::setPosition(float x, float y, float z, float w, float p, float r, bool wait)
{
setPosition(x, y, z, w, p, r);
if (wait) {
while (isMoving());
}
}
//设置tcp位置
void CoppeliaRobot::setPosition(float x, float y, float z, float w, float p, float r)
{
//enableIk(true); //启用IK模式 Enable IK mode
float pos[6];
pos[0] = x / 1000; // meter
pos[1] = y / 1000; // meter
pos[2] = z / 1000; // meter
pos[3] = w * DEG_TO_RAD; // rad
pos[4] = p * DEG_TO_RAD; // rad
pos[5] = r * DEG_TO_RAD; // rad
//调用脚本函数
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_movePosition", // Function name 移动位置函数remoteApi_movePosition
0, NULL, // inIntCnt, inInt
6, pos, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot);//单次模式
}
//设置机器人关节位置 Set Robot Joint Position:
///////////////////////////////////////////////////////////////////////////
void CoppeliaRobot::setJointPosition(float joint[6], bool wait) {
setJointPosition(joint[0], joint[1], joint[2], joint[3], joint[4], joint[5]);
if(wait) while (isMoving()); // Wait moving
}
void CoppeliaRobot::setJointPosition(float J1, float J2, float J3, float J4, float J5, float J6)
{
//enableIk(false); // Enable Joint MODE
float joint[6];
joint[0] = J1 * (DEG_TO_RAD);
joint[1] = J2 * (DEG_TO_RAD);
joint[2] = J3 * (DEG_TO_RAD);
joint[3] = J4 * (DEG_TO_RAD);
joint[4] = J5 * (DEG_TO_RAD);
joint[5] = J6 * (DEG_TO_RAD);
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_moveJointPosition", // Function name
0, NULL, // inIntCnt, inInt
6, joint, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot);
}
//设置关节位置:调用脚本函数moveSingleJointPosition
void CoppeliaRobot::setJointPosition(int num, float tetha)
{
enableIk(false); // Enable Joint Mode
float jointAngle = tetha * DEG_TO_RAD;
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"moveSingleJointPosition", // Function name
1, &num, // inIntCnt, inInt
1, &jointAngle, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot_wait);
while (isMoving());//等待到位?
}
//读取当前机器人关节位置 调用脚本函数:remoteApi_getJointPosition Read Current Robot Joint Position:
void CoppeliaRobot::readCurrentJointPos(float joint_pos[6])
{
int cnt;//6个关节
float *jointData;//关节数据指针
int* inData = nullptr;//
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_getJointPosition", // Function name
0, NULL, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
&cnt, &jointData, // outFloatCnt, outFloat 数量,关节数据
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_buffer);
if (jointData==NULL)
{
return;
}
try
{
for (int i = 0; i < 6; i++) {
joint_pos[i] = jointData[i] * RAD_TO_DEG;
}
}
catch (const std::exception& e)
{
//MessageBoxA(NULL,e.what(), "Warn", MB_OK); //winuser.h https://docs.microsoft.com/en-us/windows/win32/api/winuser/nf-winuser-messageboxa
}
}
// Get robot moving status. Return TRUE if the robot is moving and
// return FALSE is robot is stop.
// 获取机器人移动状态。如果机器人正在移动并且返回 TRUE
// 返回 FALSE 是机器人停止。
bool CoppeliaRobot::isMoving() {
Sleep(50);
simxGetIntegerSignal(clientID, "moving_status", &moving, simx_opmode_buffer);//获取移动状态
if (moving) return true;//1:移动中
else return false;//0:未移动
}
//手臂机器人手抓 抓 Arm Robot Gripper Catch
void CoppeliaRobot::gripperCatch()
{
int state = 0;//输入夹爪状态 0
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_setGripper", // Function name
1, &state, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot);
}
//释放夹爪 Arm Robot Gripper Gripper Release
void CoppeliaRobot::gripperRelease()
{
int state = 1;//释放夹爪:1
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_setGripper", // Function name//调用脚本函数:remoteApi_setGripper
1, &state, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot);//单次调用模式
}
// Get Robot Tip Homogeneous Matrix:
/////////////////////////////////////////////////////////////////////////////////
//获取tip位姿矩阵
void CoppeliaRobot::getObjectMatrix(float M[4][4])
{
int cnt;//12
float *pData;//位姿矩阵数据
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"getObjectMatrix", // Function name //获取tip位姿矩阵
0, NULL, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
&cnt, &pData, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_oneshot_wait);
M[0][0] = pData[0];
M[0][1] = pData[1];
M[0][2] = pData[2];
M[0][3] = pData[3];
M[1][0] = pData[4];
M[1][1] = pData[5];
M[1][2] = pData[6];
M[1][3] = pData[7];
M[2][0] = pData[8];
M[2][1] = pData[9];
M[2][2] = pData[10];
M[2][3] = pData[11];
M[3][0] = 0;
M[3][1] = 0;
M[3][2] = 0;
M[3][3] = 1;
}
// 读取当前机器人tip位置 Read Current Robot Tip Position
/////////////////////////////////////////////////////////////////////////////////
void CoppeliaRobot::readPosition(float currentPos[6])
{
/*
simxGetObjectPosition(clientID, ikTipHandle, robotHandle, __pos, simx_opmode_buffer);
simxGetObjectOrientation(clientID, ikTipHandle, robotHandle, __rot, simx_opmode_buffer);
currentPos[0] = __pos[0] * 1000; //mm
currentPos[1] = __pos[1] * 1000; //mm
currentPos[2] = __pos[2] * 1000; //mm
currentPos[3] = __rot[0] * RAD_TO_DEG;
currentPos[4] = __rot[1] * RAD_TO_DEG;
currentPos[5] = __rot[2] * RAD_TO_DEG;
*/
simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_getPosition", // Function name 脚本函数:获取tip位置 remoteApi_getPosition
0, NULL, // inIntCnt, inInt
0, NULL, // inFloatCnt, inFloat
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
&__cnt, &__position, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_buffer);
//位姿数据 转换为合适单位
if (__position != nullptr) {
currentPos[0] = __position[0] * 1000; //mm
currentPos[1] = __position[1] * 1000; //mm
currentPos[2] = __position[2] * 1000; //mm
currentPos[3] = __position[3] * RAD_TO_DEG;
currentPos[4] = __position[4] * RAD_TO_DEG;
currentPos[5] = __position[5] * RAD_TO_DEG;
}
}
//读取对象位置
void CoppeliaRobot::readObjectPosition(string object_name, float currentPos[6]) {
int object_handle;//对象句柄
float position[3], orientation[3];//位置,姿态向量
simxGetObjectHandle(clientID, object_name.c_str(), &object_handle, simx_opmode_oneshot_wait);//获取对象句柄
simxGetObjectPosition(clientID, object_handle, robotHandle, position, simx_opmode_oneshot_wait);//获取对象位置
simxGetObjectOrientation(clientID, object_handle, robotHandle, orientation, simx_opmode_oneshot_wait);//获取对象姿态
currentPos[0] = position[0] * 1000; //mm
currentPos[1] = position[1] * 1000; //mm
currentPos[2] = position[2] * 1000; //mm
currentPos[3] = orientation[0] * RAD_TO_DEG;
currentPos[4] = orientation[1] * RAD_TO_DEG;
currentPos[5] = orientation[2] * RAD_TO_DEG;
}
// 直接设置机器人位置和方向(无速度控制) 需IK模式 Directly set the robot position and orientation (no speed control)
void CoppeliaRobot::setPosition2(float pos[6])
{
float position[3], orientation[3];
for (int i = 0; i < 3; i++) {
position[i] = pos[i] / 1000; // mm
orientation[i] = pos[i + 3] * DEG_TO_RAD;
}
simxSetObjectPosition(clientID, ikTargetHandle, robotHandle, position, simx_opmode_oneshot_wait);//设置机器人位置
simxSetObjectOrientation(clientID, ikTargetHandle, robotHandle, orientation, simx_opmode_oneshot_wait);//设置机器人方向
}
// 设置机器人速度Set Robot Speed : 0 - 100
///////////////////////////////////////////////////////////////////////
void CoppeliaRobot::setSpeed(float vel, float ang_vel)
{
float lin_vel = vel / 1000; //线速度
float rad_vel = ang_vel * DEG_TO_RAD; //角速度
float vel_data[2] = {lin_vel, rad_vel};//速度数组
//调用脚本函数remoteApi_setSpeed
int result = simxCallScriptFunction(
clientID,
scriptName.c_str(), // the name of the associated obejct script
sim_scripttype_childscript, // the handle of the script
"remoteApi_setSpeed", // Function name
0, NULL, // inIntCnt, inInt
2, vel_data, // inFloatCnt, inFloat 2个速度,线速度和角速度
0, NULL, // inStringCnt, inString
0, NULL, // inBufferSize, inBuffer
NULL, NULL, // outIntCnt, outInt
NULL, NULL, // outFloatCnt, outFloat
NULL, NULL, // outStringCnt, outString
NULL, NULL, // outBufferSize, outBuffer
simx_opmode_blocking);
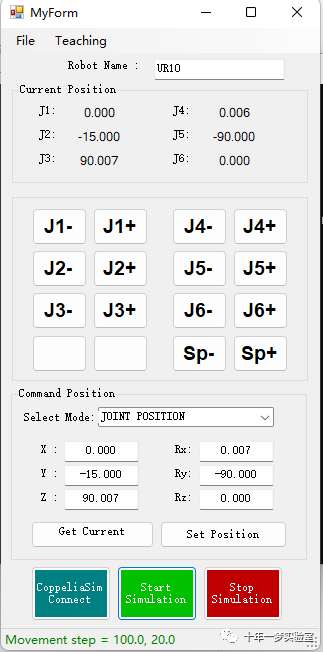
}三、主窗体程序:读取关节位置、tip位置。连接、断开服务器;启动、停止仿真。单关节控制、tip位置控制。
#include "MyForm.h"
#include "TeachingForm.h"
#include "include/coppeliasim.h"
#include "variables.h"
#include <iostream>
#include <windows.h>
using namespace System;
using namespace System::Windows::Forms;
using namespace UI_Demo;
using namespace std;
CoppeliaSim mSim; //仿真器对象
CoppeliaRobot mRobot;//机器人对象
float posData[6];//
int mode = 0;// 0-IK 1-FK
int step_index = 0;
float pos_step_data[6] = { 1, 5, 10, 20, 50, 100};//位置步进数据
float ang_step_data[6] = { 0.5, 1, 2, 5, 10, 20};//角度步进数据
float pos_step = 10;
float ang_step = 0;
// 函数声明Prototype Function
void thread_read_data(void*);
// 初始化对话框 Initialization program
void MyForm::on_init() {
//设置定时器 Initialize timer:
timer1->Interval = 50;
timer1->Enabled = true;
cb_selectmode->SelectedIndex = mode;
_beginthread(thread_read_data, 0, NULL);//开启更新数据线程
label_status->Text = "Initialize program";//初始化程序
}
// 更新变量posData数据 线程 Thread for updating the data
void thread_read_data(void*) {
while (true) {
if (mode == 0) {//ikmode
mRobot.readPosition(posData);//读取tip位姿,得到posData[]
}
else {//关节模式
mRobot.readCurrentJointPos(posData);//读取关节位置 得到posData[]
}
Sleep(50);
}
}
//定时器函数:根据posData更新UI数据 Timer function: update the GUI information
void MyForm::on_timer() {
update_pos_data();//定时更新UI位置数据 tb_pos_x->Text = posData[0].ToString("N3");
}
//连接 端口19997
void MyForm::btn_connect() {
if (mSim.connect(19997)) {
label_status->Text = "Coppeliasim connection success...";
label_status->ForeColor = System::Drawing::Color::Green;
mSim.startSimulation();
mRobot.init("UR10");
}
}
//开始仿真
void MyForm::btn_start_sim() {
mSim.startSimulation();
}
//停止仿真
void MyForm::btn_stop_sim() {
mSim.stopSimulation();
}
//修改标签
void MyForm::change_label() {
mode = cb_selectmode->SelectedIndex;
if (mode == 0) {//IK模式
label_x->Text = "X:";
label_y->Text = "Y:";
label_z->Text = "Z:";
label_rx->Text = "Rx:";
label_ry->Text = "Ry:";
label_rz->Text = "Rz:";
btn_x_min->Text = "X-";
btn_x_plus->Text = "X+";
btn_y_min->Text = "Y-";
btn_y_plus->Text = "Y+";
btn_z_min->Text = "Z-";
btn_z_plus->Text = "Z+";
btn_rx_min->Text = "Rx-";
btn_rx_plus->Text = "Rx+";
btn_ry_min->Text = "Ry-";
btn_ry_plus->Text = "Ry+";
btn_rz_min->Text = "Rz-";
btn_rz_plus->Text = "Rz+";
}
else {//关节模式
label_x->Text = "J1:";
label_y->Text = "J2:";
label_z->Text = "J3:";
label_rx->Text = "J4:";
label_ry->Text = "J5:";
label_rz->Text = "J6:";
btn_x_min->Text = "J1-";
btn_x_plus->Text = "J1+";
btn_y_min->Text = "J2-";
btn_y_plus->Text = "J2+";
btn_z_min->Text = "J3-";
btn_z_plus->Text = "J3+";
btn_rx_min->Text = "J4-";
btn_rx_plus->Text = "J4+";
btn_ry_min->Text = "J5-";
btn_ry_plus->Text = "J5+";
btn_rz_min->Text = "J6-";
btn_rz_plus->Text = "J6+";
}
update_set_data();
}
void MyForm::update_pos_data() {
tb_pos_x->Text = posData[0].ToString("N3");
tb_pos_y->Text = posData[1].ToString("N3");
tb_pos_z->Text = posData[2].ToString("N3");
tb_pos_rx->Text = posData[3].ToString("N3");
tb_pos_ry->Text = posData[4].ToString("N3");
tb_pos_rz->Text = posData[5].ToString("N3");
}
//更新数据
void MyForm::update_set_data() {
float pos[6];
if (mode == 0) {
mRobot.readPosition(pos);//读取tip位姿
}
else {
mRobot.readCurrentJointPos(pos);//读取关节位置
}
tb_set_x->Text = pos[0].ToString("N3");//保留3位小数
tb_set_y->Text = pos[1].ToString("N3");
tb_set_z->Text = pos[2].ToString("N3");
tb_set_rx->Text = pos[3].ToString("N3");
tb_set_ry->Text = pos[4].ToString("N3");
tb_set_rz->Text = pos[5].ToString("N3");
}
//获取当前位置
void MyForm::btn_get_position() {
tb_set_x->Text = tb_pos_x->Text;
tb_set_y->Text = tb_pos_y->Text;
tb_set_z->Text = tb_pos_z->Text;
tb_set_rx->Text = tb_pos_rx->Text;
tb_set_ry->Text = tb_pos_ry->Text;
tb_set_rz->Text = tb_pos_rz->Text;
}
//设置机械臂位置
void MyForm::btn_set_position() {
float cmdPos[6];
cmdPos[0] = Convert::ToDouble(tb_set_x->Text);
cmdPos[1] = Convert::ToDouble(tb_set_y->Text);
cmdPos[2] = Convert::ToDouble(tb_set_z->Text);
cmdPos[3] = Convert::ToDouble(tb_set_rx->Text);
cmdPos[4] = Convert::ToDouble(tb_set_ry->Text);
cmdPos[5] = Convert::ToDouble(tb_set_rz->Text);
mRobot.setSpeed(30, 90);//设置速度:线速度、角速度
if (mode == 0) {
mRobot.setPosition(cmdPos, false);//设置tip位置
}
else {
mRobot.setJointPosition(cmdPos, false);//设置关节位置
}
}
//运动控制:单关节控制 或者 tip单维度控制
void MyForm::movement_control(int id) {
if (mode == 0) {//IK模式
float pos[6];
mRobot.readPosition(pos);
// x
if (id == 1) pos[0] -= pos_step;
else if (id == 2) pos[0] += pos_step;
// y
else if (id == 3) pos[1] -= pos_step;
else if (id == 4) pos[1] += pos_step;
// z
else if (id == 5) pos[2] -= pos_step;
else if (id == 6) pos[2] += pos_step;
// w
else if (id == 7) pos[3] -= ang_step;
else if (id == 8) pos[3] += ang_step;
// p
else if (id == 9) pos[4] -= ang_step;
else if (id == 10) pos[4] += ang_step;
// r
else if (id == 11) pos[5] -= ang_step;
else if (id == 12) pos[5] += ang_step;
mRobot.setPosition(pos, false);
}
else {//关节模式
float pos[6];
mRobot.readCurrentJointPos(pos);//读取当前关节位置
// x
if (id == 1) pos[0] -= ang_step;
else if (id == 2) pos[0] += ang_step;
// y
else if (id == 3) pos[1] -= ang_step;
else if (id == 4) pos[1] += ang_step;
// z
else if (id == 5) pos[2] -= ang_step;
else if (id == 6) pos[2] += ang_step;
// w
else if (id == 7) pos[3] -= ang_step;
else if (id == 8) pos[3] += ang_step;
// p
else if (id == 9) pos[4] -= ang_step;
else if (id == 10) pos[4] += ang_step;
// r
else if (id == 11) pos[5] -= ang_step;
else if (id == 12) pos[5] += ang_step;
mRobot.setJointPosition(pos, false);
}
}
//减小步进量
void MyForm::step_decrease() {
char str[128];
step_index--;
if (step_index < 0) step_index = 0;
pos_step = pos_step_data[step_index];
ang_step = ang_step_data[step_index];
sprintf(str,"Movement step = %.1f, %.1f", pos_step, ang_step);
label_status->Text = gcnew String(str);
}
//增加步进量
void MyForm::step_increase() {
char str[128];
step_index++;
if (step_index > 5) step_index = 5;//共6个步进模式
pos_step = pos_step_data[step_index];
ang_step = ang_step_data[step_index];
sprintf(str,"Movement step = %.1f, %.1f", pos_step, ang_step);
label_status->Text = gcnew String(str);
}
//显示示教窗口
void MyForm::show_teaching_form() {
TeachingForm ^ form = gcnew TeachingForm;//实例化示教窗口
form->Show();
}四、示教窗口:指令(集合)操作
#include "TeachingForm.h"
#include "variables.h" //外部数据定义
#include <msclr\marshal_cppstd.h>
using namespace System;
using namespace System::Windows::Forms;
using namespace UI_Demo;
using namespace std;
using namespace msclr::interop;
vector<record_t> recorded_pos;//指令集
//示教窗口初始化
void TeachingForm::on_init() {
char str[256];
record_t mPos;//一条指令数据
int size = recorded_pos.size();//指令集数量
//遍历所有指令
for (int i = 0; i < size; i++) {
mPos = recorded_pos[i];
sprintf(str, "[%d] %s = %.3f, %.3f, %.3f, %.3f, %.3f, %.3f",
mode, mPos.label.c_str(),
mPos.pos[0],
mPos.pos[1],
mPos.pos[2],
mPos.pos[3],
mPos.pos[4],
mPos.pos[5]
);
listBox1->Items->Add(gcnew String(str));//列表显示所有指令
}
}
//添加指令
void TeachingForm::btn_add() {
char str[256];
record_t mPos;
for(int i = 0; i < 6; i++)
mPos.pos[i] = posData[i];//当前位置数据
mPos.label = marshal_as<string>(textBox1->Text);//标签 :用户输入
if (mPos.label == "")
mPos.label = "recorded_pos";//默认标签
mPos.mode = mode;//指令模式
sprintf(str, "[%d] %s = %.3f, %.3f, %.3f, %.3f, %.3f, %.3f",
mode, mPos.label.c_str(),
mPos.pos[0],
mPos.pos[1],
mPos.pos[2],
mPos.pos[3],
mPos.pos[4],
mPos.pos[5]
);//指令字符串
printf(str);
listBox1->Items->Add(gcnew String(str));//显示
recorded_pos.push_back(mPos);//添加到指令集
}
//移除到选择的指令数据
void TeachingForm::btn_move() {
record_t mPos;
int index;
mRobot.setSpeed(30, 30);//设置速度
index = listBox1->SelectedIndex;//选择记录索引
mPos = recorded_pos[index];//指令数据
float cmdPos[6];
for (int i = 0; i < 6; i++)
cmdPos[i] = mPos.pos[i];//指令位置
if (mPos.mode == 0)
mRobot.setPosition(cmdPos, false);//移动tip位置
else
mRobot.setJointPosition(cmdPos, false);//移动关节位置
}
//删除
void TeachingForm::btn_delete() {
}五、全局变量variables.h
#pragma once
#include <iostream>
#include <vector>
#include "include/coppeliasim.h"
//该类定义了全局变量
using namespace std;
//一条记录:指令记录
typedef struct record_t {
int mode;//模式
float pos[6];//位置
string label;//标签
};
extern vector<record_t> recorded_pos;//指令集
extern float posData[6];//位置数组:tip位姿或者关节位置
extern int mode;//当前模式
extern CoppeliaSim mSim;//仿真器句柄
extern CoppeliaRobot mRobot;//机器人句柄六、Lua脚本函数:C++可以调用
-- ======================================================
-- RemoteApi Functions
-- ======================================================
-- Set Robot Speed --
function remoteApi_setSpeed(inInt,inFloat,inString,inBuffe)
local linear_vel=inFloat[1]
local angular_vel=inFloat[2]
local ikMaxVel={linear_vel, linear_vel, linear_vel, angular_vel}
local fkMaxVel={angular_vel, angular_vel, angular_vel, angular_vel, angular_vel, angular_vel}
print('Remote API -> Set robot speed = ', ikMaxVel)
ik_data.maxVel = ikMaxVel
fk_data.maxVel = fkMaxVel
end
-- Move Robot Position --
function remoteApi_movePosition(inInt,inFloat,inString,inBuffer)
targetPos={}
targetPos[1]=inFloat[1]
targetPos[2]=inFloat[2]
targetPos[3]=inFloat[3]
targetPos[4]=inFloat[4]
targetPos[5]=inFloat[5]
targetPos[6]=inFloat[6]
moveIkMode=true
end
-- Move Robot Joint Position --
function remoteApi_moveJointPosition(inInt,inFloat,inString,inBuffer)
targetJoint={}
for i=1,6,1 do
targetJoint[i] = inFloat[i]
end
moveJointMode=true
end
-- Get Object Position --
function remoteApi_getPosition()
--val = sim.getFloatSignal('forceX')
local pos=sim.getObjectPosition(simTip, simRobot)
local rot=sim.getObjectOrientation(simTip, simRobot)
local endpos = {pos[1],pos[2],pos[3],rot[1],rot[2],rot[3]}
return {},endpos,{},''
end
-- Get Object Joint Position --
function remoteApi_getJointPosition()
local jointPos={}
for i=1,6,1 do
jointPos[i]=sim.getJointPosition(simJoints[i])
end
return {},jointPos,{},''
end
-- Set Gripper --
function remoteApi_setGripper(state)
velocity=0.11
force=20
if state[1]==0 then
velocity=-velocity
end
local dat={}
dat.velocity=velocity
dat.force=force
sim.writeCustomDataBlock(simGripper,'activity',sim.packTable(dat))
end
-- ========================================================
-- Kinematic Functions
-- ========================================================
-- Inverse Kinematic --
function moveToPoseCallback(q,velocity,accel,auxData)
sim.setObjectPose(simTarget,-1,q)
simIK.applyIkEnvironmentToScene(auxData.ikEnv,auxData.ikGroup)
end
function moveToPose_viaIK(auxData, pose)
local pos = {pose[1], pose[2], pose[3]}
local ori = {pose[4], pose[5], pose[6]}
sim.setObjectPosition(simTargetPos, simRobot, pos)
sim.setObjectOrientation(simTargetPos, simRobot, ori)
local targetQ = sim.getObjectPose(simTargetPos,-1)
local currentQ = sim.getObjectPose(simTip,-1)
return sim.moveToPose(-1,currentQ,auxData.maxVel,auxData.maxAccel,auxData.maxJerk,targetQ,moveToPoseCallback,auxData,nil)
end
-- Forward Kinematic --
function moveToConfigCallback(config,velocity,accel,auxData)
for i=1,#auxData.joints,1 do
local jh=auxData.joints[i]
if sim.isDynamicallyEnabled(jh) then
sim.setJointTargetPosition(jh,config[i])
else
sim.setJointPosition(jh,config[i])
end
end
end
function moveToConfig_viaFK(auxData, goalConfig)
local startConfig={}
for i=1,#auxData.joints,1 do
startConfig[i]=sim.getJointPosition(auxData.joints[i])
end
sim.moveToConfig(-1,startConfig,nil,nil,auxData.maxVel,auxData.maxAccel,auxData.maxJerk,goalConfig,nil,moveToConfigCallback,auxData,nil)
end七、Lua脚本主函数
function coroutineMain()
simJoints={}
for i=1,6,1 do
simJoints[i]=sim.getObject('./joint',{index=i-1})
end
-- FK movement data:
local initConf={0,0,0,0,0,0}
local vel=180
local accel=40
local jerk=80
local maxVel={vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180}
local maxAccel={accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180}
local maxJerk={jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180}
local initConf={}
local maxConfVel={}
local maxConfAccel={}
local maxConfJerk={}
for i=1,#simJoints,1 do
initConf[i]=sim.getJointPosition(simJoints[i])
maxConfVel[i]=3*math.pi/180
maxConfAccel[i]=1.15
maxConfJerk[i]=0.4
end
fk_data={}
fk_data.maxVel=maxConfVel
fk_data.maxAccel=maxConfAccel
fk_data.maxJerk=maxConfJerk
fk_data.joints=simJoints
-- IK movement data:
local ikMaxVel={0.45,0.45,0.45,4.5}
local ikMaxAccel={0.8,0.8,0.8,0.9}
local ikMaxJerk={0.6,0.6,0.6,0.8}
ik_data={}
ik_data.maxVel=ikMaxVel
ik_data.maxAccel=ikMaxAccel
ik_data.maxJerk=ikMaxJerk
ik_data.ikEnv=ikEnv
ik_data.ikGroup=ikGroup
set_speed(50)
-- Test IK Movement:
--ik_command_demo()
--fk_command_demo()
--sim.wait(5)
--sim.stopSimulation()
while true do
if moveIkMode then
moveIkMode=false
sim.setInt32Signal('moving_status',1) -- Trigger for C++
sim.setStringSignal('moving_signal', 'MOVING') -- Trigger for Python
moveToPose_viaIK(ik_data, targetPos)
sim.setInt32Signal('moving_status',0)
sim.setStringSignal('moving_signal', 'NOT_MOVING')
end
if moveJointMode then
moveJointMode=false
sim.setInt32Signal('moving_status',1)
sim.setStringSignal('moving_signal', 'MOVING')
moveToConfig_viaFK(fk_data, targetJoint)
sim.setInt32Signal('moving_status',0)
sim.setStringSignal('moving_signal', 'NOT_MOVING')
end
end
end参考:
https://marketplace.visualstudio.com/items?itemName=RichardKaiser.cppclrwinf
The End





















 到【灌水乐园】发言
到【灌水乐园】发言







