 帧间差分法实现背景提取
帧间差分法实现背景提取







 该博客介绍了使用OpenCV库通过帧间差分法进行背景提取的实验过程。首先将BMP图像转换为灰度图,然后计算两帧之间的绝对差值并设置阈值,接着进行膨胀和腐蚀操作以增强目标区域。最后展示处理后的图像。代码还包含了对视频帧处理的注释,展示了如何应用相同的方法处理连续帧来检测运动区域。
该博客介绍了使用OpenCV库通过帧间差分法进行背景提取的实验过程。首先将BMP图像转换为灰度图,然后计算两帧之间的绝对差值并设置阈值,接着进行膨胀和腐蚀操作以增强目标区域。最后展示处理后的图像。代码还包含了对视频帧处理的注释,展示了如何应用相同的方法处理连续帧来检测运动区域。


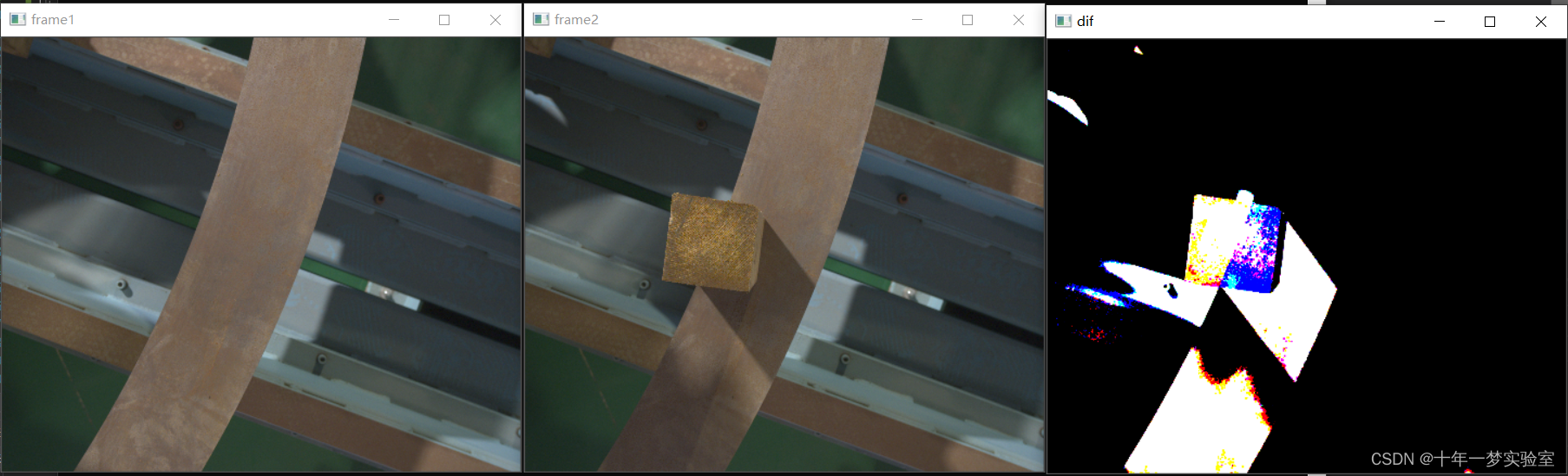

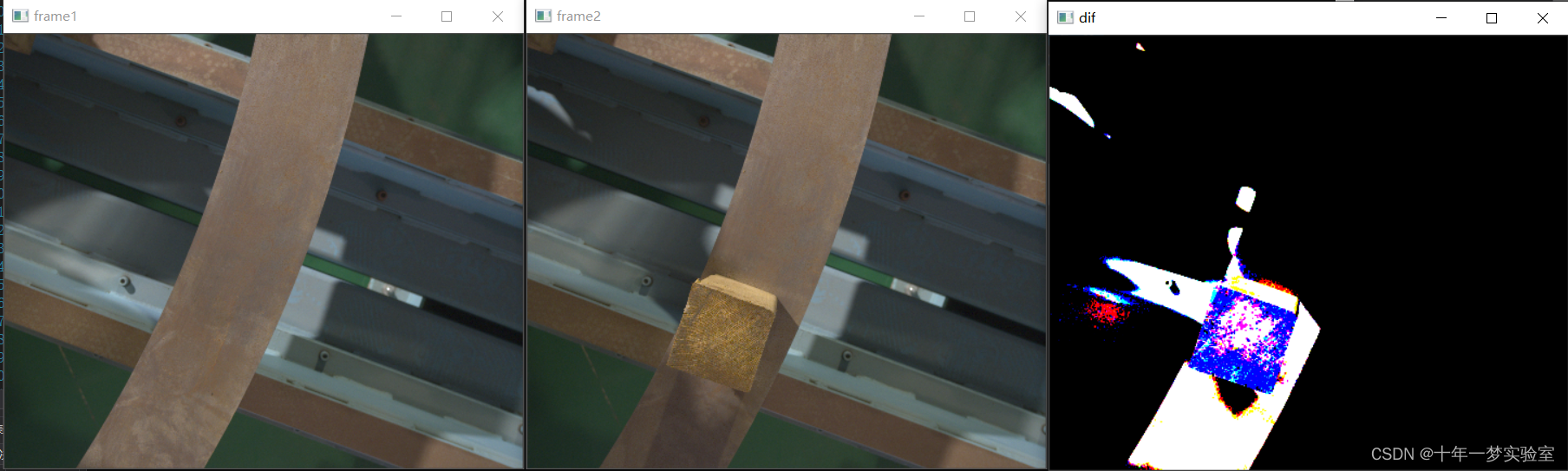
实验效果
源码:
/*=================================================
* Version:
* v1.0: 原版程序由IplImage转换为Mat
===================================================
*/
#include <opencv2/highgui.hpp>
#include <opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char* argv[])
{
Mat frame1, frame2, gray1, gray2, dif;
frame1 = imread("0.bmp");
frame2 = imread("3.bmp");
cvtColor(frame1, gray1, COLOR_BGR2GRAY);
cvtColor(frame2, gray2, COLOR_BGR2GRAY);
//Mat C1frame1, C2frema2;
//C1frame1.create(frame1.size(), CV_8UC1);
//C2frema2.create(frame2.size(), CV_8UC1);
Mat F1frame1, F1frame2;
F1frame1.create(frame1.size(), CV_32FC1);
F1frame2.create(frame2.size(), CV_32FC1);
dif.create(frame1.size(), CV_32FC1);
frame1.convertTo(F1frame1, CV_32FC1);
frame2.convertTo(F1frame2, CV_32FC1);
absdiff(F1frame1, F1frame2, dif);
dif.convertTo(dif, CV_8UC1);
threshold(dif, dif, 30, 255, cv::THRESH_BINARY);
int g_nStructElementSize = 3; //结构元素(内核矩阵)的尺寸//
// 获取自定义核
Mat element = getStructuringElement(MORPH_RECT,
Size(2 * g_nStructElementSize + 1, 2 * g_nStructElementSize + 1),
Point(g_nStructElementSize, g_nStructElementSize));
// 膨胀//
dilate(dif, dif, element);
// 腐蚀//
erode(dif, dif, element);
resize(frame1, frame1, Size(478, 400));
resize(frame2, frame2, Size(478, 400));
resize(dif, dif, Size(478, 400));
imshow("frame1", frame1);
imshow("frame2", frame2);
imshow("dif", dif);
if (waitKey(0) != -1)
{
destroyAllWindows();
}
//VideoCapture capture;
//capture = VideoCapture("./Camera Road 01.avi");
//if (!capture.isOpened())
//{
// capture = VideoCapture("../Video/Camera Road 01.avi");
// if (!capture.isOpened())
// {
// capture = VideoCapture("../../Video/Camera Road 01.avi");
// if (!capture.isOpened())
// {
// cout << "ERROR: Did't find this video!" << endl;
// return 0;
// }
// }
//}
//// 用于遍历capture中的帧,通道数为3,需要转化为单通道才可以处理//
//Mat tmpFrame, tmpFrameF;
//// 当前帧,单通道,uchar / Float
//Mat currentFrame, currentFrameF;
//// 上一帧,单通道,uchar / Float
//Mat previousFrame, previousFrameF;
//int frameNum = 0;
//capture >> tmpFrame;
//while (!tmpFrame.empty())
//{
// capture >> tmpFrame;
// //tmpFrame=cvQueryFrame(capture);
// frameNum++;
// if (frameNum == 1)
// {
// //第一帧先初始化各个结构,为它们分配空间//
// previousFrame.create(tmpFrame.size(), CV_8UC1);
// currentFrame.create(tmpFrame.size(), CV_8UC1);
// currentFrameF.create(tmpFrame.size(), CV_32FC1);
// previousFrameF.create(tmpFrame.size(), CV_32FC1);
// tmpFrameF.create(tmpFrame.size(), CV_32FC1);
// }
// if (frameNum >= 2)
// {
// //转化为单通道灰度图,此时currentFrame已经存了tmpFrame的内容//
// cvtColor(tmpFrame, currentFrame, cv::COLOR_BGR2GRAY);
// currentFrame.convertTo(tmpFrameF, CV_32FC1);
// previousFrame.convertTo(previousFrameF, CV_32FC1);
// //做差求绝对值//
// absdiff(tmpFrameF, previousFrameF, currentFrameF);
// currentFrameF.convertTo(currentFrame, CV_8UC1);
// /*
// 在currentFrameMat中找大于20(阈值)的像素点,把currentFrame中对应的点设为255
// 此处阈值可以帮助把车辆的阴影消除掉
// */
// // threshold(currentFrameF, currentFrame, 20, 255.0, CV_THRESH_BINARY);
// threshold(currentFrame, currentFrame, 30, 255, cv::THRESH_BINARY);
// int g_nStructElementSize = 3; //结构元素(内核矩阵)的尺寸//
// // 获取自定义核
// Mat element = getStructuringElement(MORPH_RECT,
// Size(2 * g_nStructElementSize + 1, 2 * g_nStructElementSize + 1),
// Point(g_nStructElementSize, g_nStructElementSize));
// // 膨胀//
// dilate(currentFrame, currentFrame, element);
// // 腐蚀//
// erode(currentFrame, currentFrame, element);
// }
// //把当前帧保存作为下一次处理的前一帧//
// cvtColor(tmpFrame, previousFrame, cv::COLOR_BGR2GRAY);
// // 显示图像
// imshow("Camera", tmpFrame);
// imshow("Moving Area", currentFrame);
// waitKey(25);
//}
// destroyAllWindows();
}

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









