




 本文深入探讨了一款基于多阶段决策的动态规划(DP)问题,重点讲解了如何利用DP解决赛道游戏中能量管理和时间优化的问题。文章分析了游戏规则中关于能量获取与消耗的特殊情况,提出了一种状态表示方法,并设计了状态转移方程,有效避免了非法状态的出现,最终实现了最短用时的计算。
本文深入探讨了一款基于多阶段决策的动态规划(DP)问题,重点讲解了如何利用DP解决赛道游戏中能量管理和时间优化的问题。文章分析了游戏规则中关于能量获取与消耗的特殊情况,提出了一种状态表示方法,并设计了状态转移方程,有效避免了非法状态的出现,最终实现了最短用时的计算。
多阶段决策dp。
这道题题意上需要注意两点:(这两点都与实际游戏相悖,这题出的那年06年我就在玩了)
- 加速行驶的那一段赛道是不会获得能量的。
- 可以认为,判断当前是否废掉一个能量槽(触发条件:当前赛道普通行驶 且 上一段赛道末尾能量值为
14,则直接减去4(+1-5)点能量)是在当前赛道的末尾进行的,而下一段赛道是否使用加速卡也是在下一段赛道的末尾进行的。
也就是说,不允许有那种极限操作(当前已有两个加速且能量刚满,然后瞬间使用一个加速且又得到一个加速,没有任何浪费)。
这道题我想到了用dp[100*100][15]这样来表示状态。但是没注意到以上两点。由以上可知,每段末尾的能量值可以是0,最多是14,不能有15的情况(出现15瞬间变为10)。
由此得知,每段赛道只有在自己赛道末尾这个时机去更新当前能量值,且只关心自己这段赛道的情况。更新只有三种情况,-5(当前使用加速了)或+1(当前没使用加速)或-4(当前没加速,因为卡槽和能量槽都满了所以废掉能量槽)。
所以,dp[i][j]表示从起点行驶到第i段赛道末尾(已更新能量值),当前的能量值为j的情况下的最短用时。
由此可以设计出状态转移。必须注意数组越界的情况,而且这些情况往往意味着无效状态(但无效状态可能并不止这些),所以j==0和j>9的情况都只对应着当前赛道一定加速和一定没加速。但别忘了j==10还有可能来源于能量废掉。
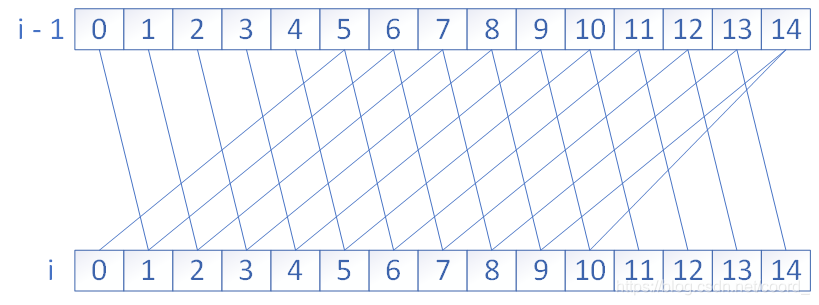
其实还有很多状态是非法的,比如dp[0][1],dp[1][2],dp[2][1]这些,说不完的,但至少可以保证数组不越界了。这些为什么不会出幺蛾子?其实可以这样想:我先把dp全部弄成INF(因为取最小),然后把唯一的初始状态dp[0][0]=0设为合法,可以想到“通过合法状态转移到的状态都是合法状态(体会下图)”,所以其逆否命题也成立(非法状态一定由非法状态得到)。
#include <cstdio>
#include <iostream>
#include <algorithm>
#include <vector>
#include <cstring>
#include <string>
#include <queue>
using namespace std;
const int INF = 0x3f3f3f3f;
int L, N;
int A[10000], B[10000];
int dp[10000][15]; //
int ans;
void init()
{
memset(dp, 0x3f, sizeof dp);
dp[0][0] = 0;
ans = INF;
}
int main()
{
for (; ~scanf("%d%d", &L, &N);)
{
init();
for (int i = 1; i <= L; i++)
scanf("%d", &A[i]);
for (int i = 1; i <= L; i++)
scanf("%d", &B[i]);
N *= L;
A[0] = A[L]; // 这里很重要。模L的结果是0~L-1,而下标为0的值没有被赋予
B[0] = B[L];
for (int i = L + 1; i <= N; i++)
{
A[i] = A[i%L];
B[i] = B[i%L];
}
for (int i = 1; i <= N; i++)
{
for (int j = 0; j <= 14; j++)
{
if (j == 0) dp[i][j] = dp[i - 1][j + 5] + B[i];
else if (j > 10) dp[i][j] = dp[i - 1][j - 1] + A[i];
else if (j == 10) dp[i][j] = min(dp[i - 1][j - 1] + A[i], dp[i - 1][14] + A[i]); //
else dp[i][j] = min(dp[i - 1][j - 1] + A[i], dp[i - 1][j + 5] + B[i]);
}
}
for (int j = 0; j <= 14; j++)
ans = min(ans, dp[N][j]);
printf("%d\n", ans);
}
return 0;
}
/* 如果你觉得dp[x][y]一定小于dp[x][y+z] (z>0),可以试试这个例子(样例去掉了最后一段),让最后的每个dp[N][j]都输出出来
17 1
9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9 9
8 8 8 8 8 8 8 8 8 8 8 8 8 8 1 1 8
*/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









