




 本文详细介绍了ROS中costmap_2d库中的几个关键数学函数,包括sign函数、distance函数、distanceToLine函数以及intersects函数。这些函数涉及点到点、点到线段的距离计算,以及判断点是否在多边形内部或多边形间是否相交的算法,对于理解ROS中的路径规划和避障功能至关重要。
本文详细介绍了ROS中costmap_2d库中的几个关键数学函数,包括sign函数、distance函数、distanceToLine函数以及intersects函数。这些函数涉及点到点、点到线段的距离计算,以及判断点是否在多边形内部或多边形间是否相交的算法,对于理解ROS中的路径规划和避障功能至关重要。

1、内联函数[double sign(double x)]
功能:输入x如果小于0返回-1,否则返回1。
2、内联函数[double sign0(double x)]
功能:输入x如果小于0返回-1,如果大于0返回1,否则返回0。
3、内联函数[double distance(double x0, double y0, double x1, double y1)]
功能:输入坐标点P0(x0,y0)、P1(x1,y1),返回|P0P1|距离。
4、函数[double distanceToLine(double pX, double pY, double x0, double y0, double x1, double y1)]
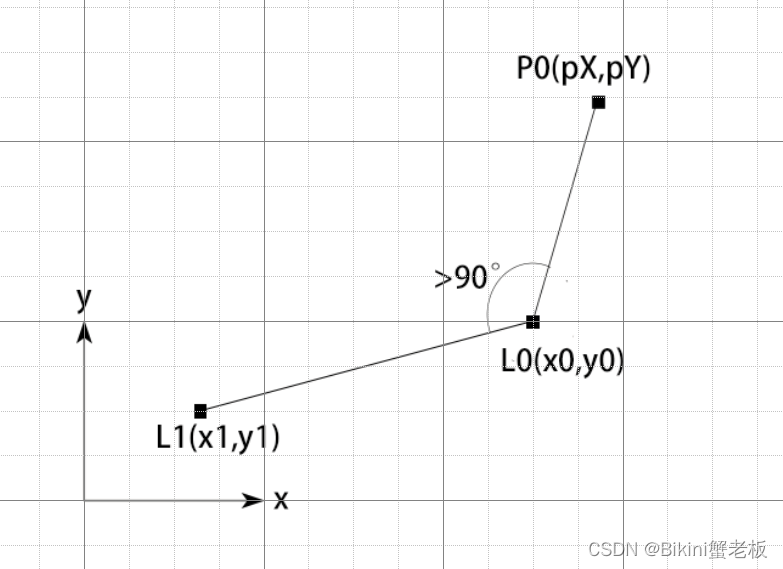
功能:输入坐标点P0(pX,pY)与线段L的坐标点L0(x0,y0)、L1(x1,y1),返回P0到线段的距离。
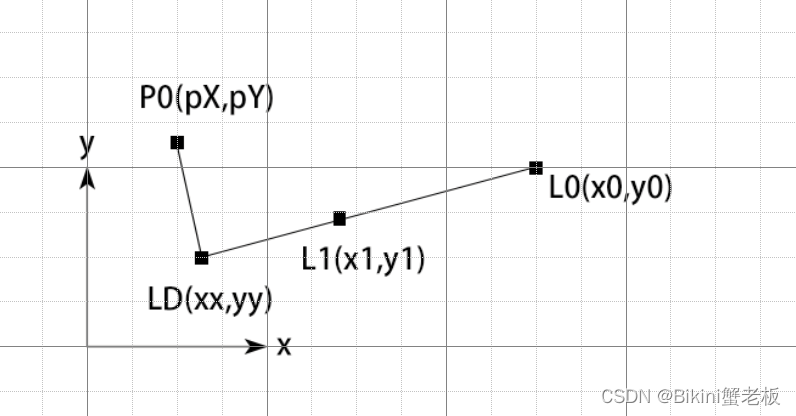
设垂点LD(xx,yy),dot为向量L0P0·L0L1(即|L0L1|和L0P0的投影长度的乘积),len_sq为向量L0L1·L0L1(即|L0L1|和L0L1的投影长度的乘积,其实就是向量L0L1模的平方),param即为L0LD与L0L1模长比例。
当L0P0·L0L1的夹角大于90°时param<0,此时P0距离线段L最近点为L0;
当L0LD的模比L0L1的模大时param>1,此时P0距离线段L最近点为L1;
剩下的情况通过比例可求得垂点为最近点;
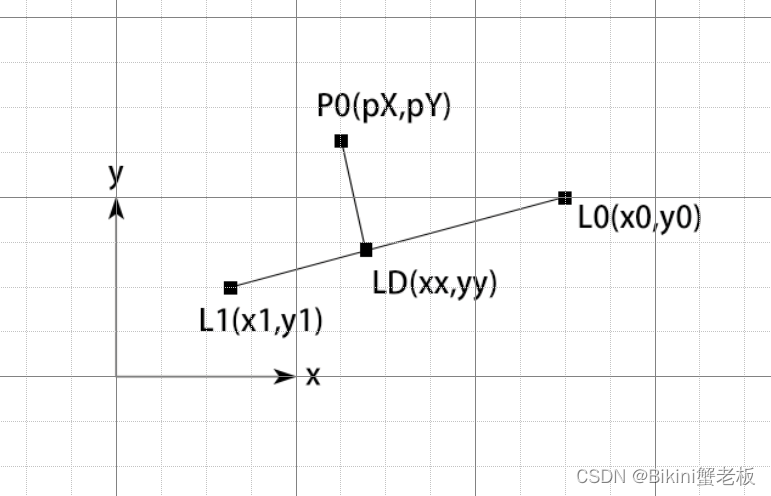
由此可求得垂点LD,通过求垂点LD与P0的距离可得P0到直线得距离。
5、函数[bool intersects(std::vector<geometry_msgs::Point>& polygon, float testx, float testy)]
功能:输入多边形顶点集和test点,返回该点是否与多边形相交
判断一个点是否在多边形内部,可以使用引射线的方法
测试点Ptest(testx,testy)
条件1:(yi > testy) != (yj > testy)
只有当yi<esty<yj或者yj<testy<yi时条件成立。
条件2:testx < (xj - xi) * (testy - yi) / (yj - yi) + xi
只有当测试点Ptest在线段i,j下方时,即过测试点Ptest向上画射线(Y轴),条件1、2同时成立时射线与线段i,j相交。
遍历多边形的边,每次条件1和条件2同时成立时(即射线与边相交)把布尔量取反;当相交次数为奇数时,测试点Ptest在多边形内,否则不在多边形内。(参考PNPoly算法)
6、函数[bool intersects(std::vector<geometry_msgs::Point>& polygon1, std::vector<geometry_msgs::Point>& polygon2)]
功能:输入两个多边形顶点集,返回两个多边形是否相交
分别取polygon1的每个顶点判断是否在多边形polygon2内部,然后再分别取polygon2的每个顶点判断是否在多边形polygon1内部。

















 6091
6091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









