




1、topic数据格式
map与costmap都是以nav_msgs::OccupancyGrid类型发布其topic。
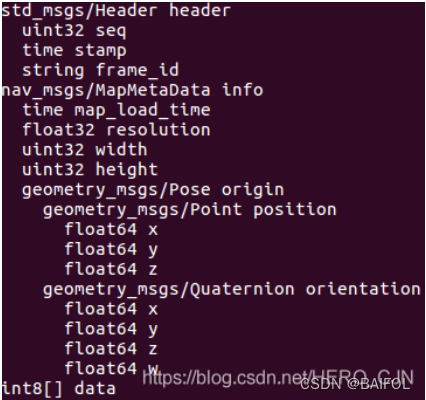
其中整张地图的障碍物信息存放在data数据成员中,data是一个int8类型的vector向量,即一维数组。假设一张pgm的map地图,宽:width,高:height,单位为像素,分辨率为resolution,左下角像素点在世界坐标系下的位置为:(origin_x,origin_y),单位米,那么世界坐标系下一点(x,y)单位米,假设其在地图中,那么该点对应的data中的索引index为:
index = (int)((x - origin_x) / resolution) + ((int)((y - origin_y) / resolution)) * width;
那么该点在地图中的信息即为data[index]
即:data是按照那张地图图片的自底向上,自左至右逐个像素点存储的
map中data存储的格式如下:
0:空白区域
100:障碍物
-1:未知
1-99:根据像素的灰度值转换后的值,代表有障碍物的概率
costmap中的data 由0-255转换至0-100。
2、costmap表示格式
ROS的代价地图(costmap)采用网格(grid)形式,每个网格的值(cell cost)从0~255。分成三种状态:被占用(有障碍)、自由区域(无障碍)、未知区域。虽然代价地图中每个cell可用255个不同值中任何一个值,可是下层数据结构仅需要3个值。 具体来说在这种下层结构中,每个cell仅需要3个值来表示cell的3种状态:free,occupied,unknown。
NO_INFORMATION = 255 未知空间
LETHAL_OBSTACLE = 254 说明该单元格中存在一个实际的障碍。若机器人的中心在该单元格中,机器人必然会跟障碍物相撞
INSCRIBED_INFLATED_OBSTACLE = 253 说明该单元格离障碍物的距离小于机器人内切圆半径。若机器人的中心位于等于或高于"Inscribed" cost的单元格,机器人必然会跟障碍物相撞
FREE_SPACE = 0 没有障碍的空间
Map Updates
代价地图以参数update_frequency 指定的周期进行地图更新。每个周期获取传感器数据后,代价地图底层占用结构都会执行标记和清除操作,并且将该结构投影到代价图且附上相应代价值。然后,每个代价值为costmap_2d::LETHAL_OBSTACLE的单元格都会执行障碍物膨胀操作,即从每个占用单元格向外传播代价值,直到用户定义的膨胀半径为止。
联系:13835327580(微信同号)

















 4474
4474

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









