




 本文介绍了开源点云可视化工具CloudCompare的安装及使用方法。包括通过Snap安装CloudCompare的过程,如何用Python生成txt格式的点云数据,并利用CloudCompare进行加载与查看。
本文介绍了开源点云可视化工具CloudCompare的安装及使用方法。包括通过Snap安装CloudCompare的过程,如何用Python生成txt格式的点云数据,并利用CloudCompare进行加载与查看。
点云可视化工具CloudCompare
cloudcompare是一个开源的网站:https://www.cloudcompare.org/
安装方法为:
1安装snap
sudo apt-get install snapd
2安装cloudcompare
snap install cloudcompare
3启动软件:
cloudcompare.CloudCompare
原文链接:
参考教程
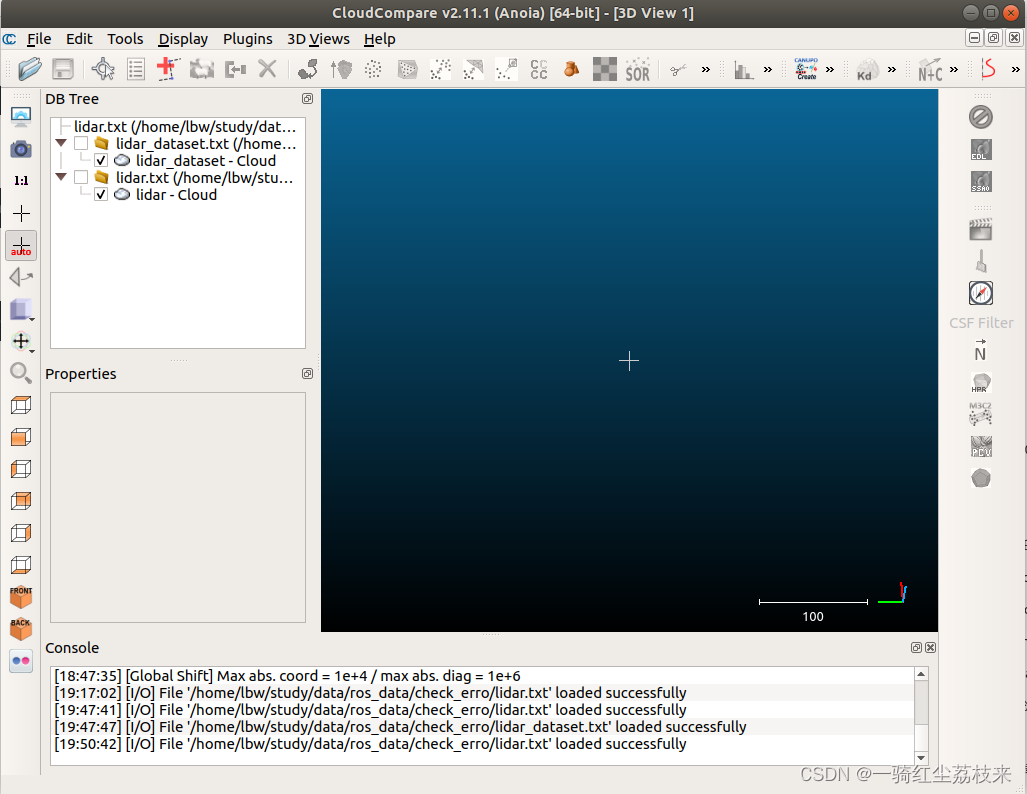
打开后界面如下:
python中将numpy保存成txt
import numpy as np
lidar_data = np. 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 187
187


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








