




 该博客介绍了浙大开源代码中GridMap类的实现,其通过智能指针封装简化实例创建和管理。通过订阅d435i深度话题及odom实现建图,还阐述了初始化栅格地图的参数和数据结构,以及两个主要定时器更新地图占据信息、可视化地图等内容。
该博客介绍了浙大开源代码中GridMap类的实现,其通过智能指针封装简化实例创建和管理。通过订阅d435i深度话题及odom实现建图,还阐述了初始化栅格地图的参数和数据结构,以及两个主要定时器更新地图占据信息、可视化地图等内容。
浙大这套开源的代码写得很nice 很值得借鉴 , 对于 GridMap 类的实现。该类通过智能指针的封装简化了 GridMap 实例的创建和管理过程。一旦通过 GridMap::initMap(ros::NodeHandle &nh) 方法初始化,就可以方便地调用 GridMap 及其所有相关功能
它主要订阅了d435i的深度话题以及odom来实现的建图
typedef std::shared_ptr<GridMap> Ptr;
单独写一个node试一下
#include <ros/ros.h>
#include "plan_env/grid_map.h"
GridMap::Ptr grid_map_test_ ;
int main(int argc, char** argv)
{
ros::init(argc, argv, "gridmap_test_node");
ros::NodeHandle nh_("~");
grid_map_test_.reset(new GridMap) ;
grid_map_test_->initMap(nh_) ;
ros::spin();
return 0;
}
然后再在原来的基础上搞一个launch
<launch>
<node pkg="ego_planner" name="gridmap_test_node" type="gridmap_test_node" output="screen">
<remap from="~grid_map/odom" to="/mavros/local_position/odom"/>
<remap from="~grid_map/cloud" to="nouse2"/>
<remap from="~grid_map/pose" to = "nouse1"/>
<remap from="~grid_map/depth" to = "/iris/realsense/depth_camera/depth/image_raw"/>
<param name="grid_map/resolution" value="0.15" />
<param name="grid_map/map_size_x" value="50" />
<param name="grid_map/map_size_y" value="25" />
<param name="grid_map/map_size_z" value="3.0" />
<param name="grid_map/local_update_range_x" value="5.5" />
<param name="grid_map/local_update_range_y" value="5.5" />
<param name="grid_map/local_update_range_z" value="4.5" />
<param name="grid_map/obstacles_inflation" value="0.299" />
<param name="grid_map/local_map_margin" value="10"/>
<param name="grid_map/ground_height" value="-0.01"/>
<!-- camera parameter -->
<param name="grid_map/cx" value="376.0"/>
<param name="grid_map/cy" value="240.0"/>
<param name="grid_map/fx" value="319.9988245765257"/>
<param name="grid_map/fy" value="319.9988245765257"/>
<!-- depth filter -->
<param name="grid_map/use_depth_filter" value="true"/>
<param name="grid_map/depth_filter_tolerance" value="0.15"/>
<param name="grid_map/depth_filter_maxdist" value="5.0"/>
<param name="grid_map/depth_filter_mindist" value="0.2"/>
<param name="grid_map/depth_filter_margin" value="2"/>
<param name="grid_map/k_depth_scaling_factor" value="1000.0"/>
<param name="grid_map/skip_pixel" value="2"/>
<!-- local fusion -->
<param name="grid_map/p_hit" value="0.65"/>
<param name="grid_map/p_miss" value="0.35"/>
<param name="grid_map/p_min" value="0.12"/>
<param name="grid_map/p_max" value="0.90"/>
<param name="grid_map/p_occ" value="0.80"/>
<param name="grid_map/min_ray_length" value="0.3"/>
<param name="grid_map/max_ray_length" value="5.0"/>
<param name="grid_map/visualization_truncate_height" value="1.8"/>
<param name="grid_map/show_occ_time" value="false"/>
<param name="grid_map/pose_type" value="2"/>
<param name="grid_map/frame_id" value="world"/>
</node>
<node pkg="odom_visualization" name="drone_odom_visualization" type="odom_visualization" output="screen">
<remap from="~odom" to="/mavros/local_position/odom"/>
<param name="color/a" value="1.0"/>
<param name="color/r" value="0.0"/>
<param name="color/g" value="0.0"/>
<param name="color/b" value="0.0"/>
<param name="covariance_scale" value="100.0"/>
<param name="robot_scale" value="1.0"/>
<param name="tf45" value="false"/>
<param name="drone_id" value="0"/>
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find ego_planner)/launch/gridmap_test.rviz" required="true" />
</launch>
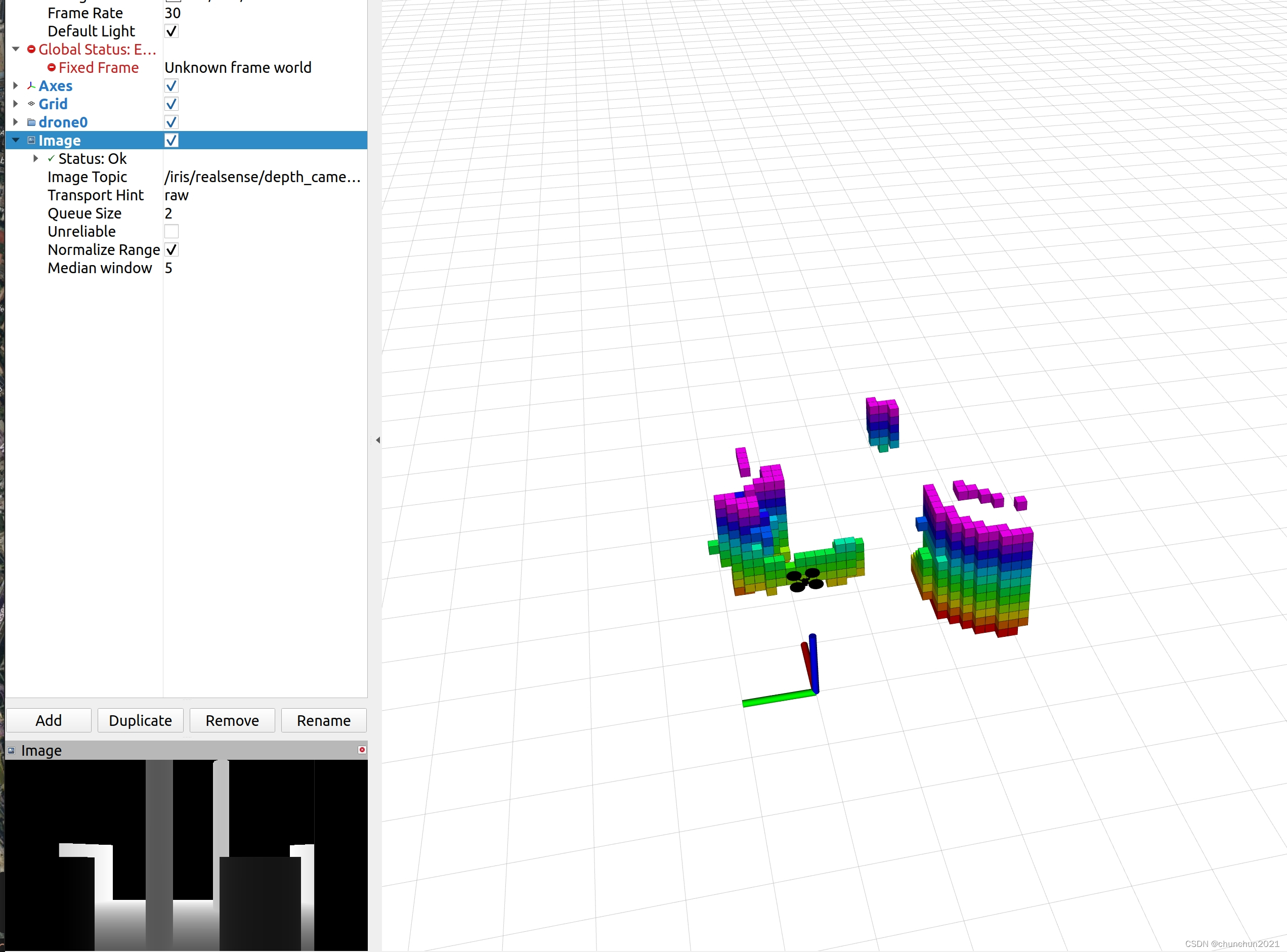
最后用gazebo进行仿真
1. 在整个ego中调用的地方
// 位于/home/Fast-Drone-250/src/planner/plan_manage/src/planner_manager.cpp下的29行
grid_map_.reset(new GridMap);
//GridMap::Ptr grid_map_; 在h文件声明 , 这里使用了c++ 智能指针 , 将grid_map_ 指向一个新的对象 原来的对象(如果有的话)将被销毁。
grid_map_->initMap(nh);//传入nh 开始初始化Gridmap
bspline_optimizer_->a_star_.reset(new AStar);
bspline_optimizer_->a_star_->initGridMap(grid_map_, Eigen::Vector3i(100, 100, 100));//将该指针传入到a_star_->initGridMap
2. 初始化栅格地图GridMap::initMap(ros::NodeHandle &nh)
初始化地图的相关参数(mp_) 以及数据结构(md_) , 以及ros的回调函数以及消息发布器
void GridMap::initMap(ros::NodeHandle &nh)
{
node_ = nh;
/* get parameter */
double x_size, y_size, z_size;
node_.param("grid_map/resolution", mp_.resolution_, -1.0);
node_.param("grid_map/map_size_x", x_size, -1.0);
node_.param("grid_map/map_size_y", y_size, -1.0);
node_.param("grid_map/map_size_z", z_size, -1.0);
node_.param("grid_map/local_update_range_x", mp_.local_update_range_(0), -1.0);
node_.param("grid_map/local_update_range_y", mp_.local_update_range_(1), -1.0);
node_.param("grid_map/local_update_range_z", mp_.local_update_range_(2), -1.0);
node_.param("grid_map/obstacles_inflation", mp_.obstacles_inflation_, -1.0);
node_.param("grid_map/fx", mp_.fx_, -1.0);
node_.param("grid_map/fy", mp_.fy_, -1.0);
node_.param("grid_map/cx", mp_.cx_, -1.0);
node_.param("grid_map/cy", mp_.cy_, -1.0);
node_.param("grid_map/use_depth_filter", mp_.use_depth_filter_, true);
node_.param(</ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+






 到【灌水乐园】发言
到【灌水乐园】发言







