






 本教程介绍如何使用MATLAB结合VisualSFM工具箱,对360度环绕拍摄的图像序列进行点云提取和三维重建。内容涵盖软件版本选择、三维重建理论、算法步骤、工具箱下载及MATLAB编程实现,包括图片读取、图像配准、工具箱调用等关键步骤。
本教程介绍如何使用MATLAB结合VisualSFM工具箱,对360度环绕拍摄的图像序列进行点云提取和三维重建。内容涵盖软件版本选择、三维重建理论、算法步骤、工具箱下载及MATLAB编程实现,包括图片读取、图像配准、工具箱调用等关键步骤。
欢迎订阅《FPGA学习入门100例教程》、《MATLAB学习入门100例教程》
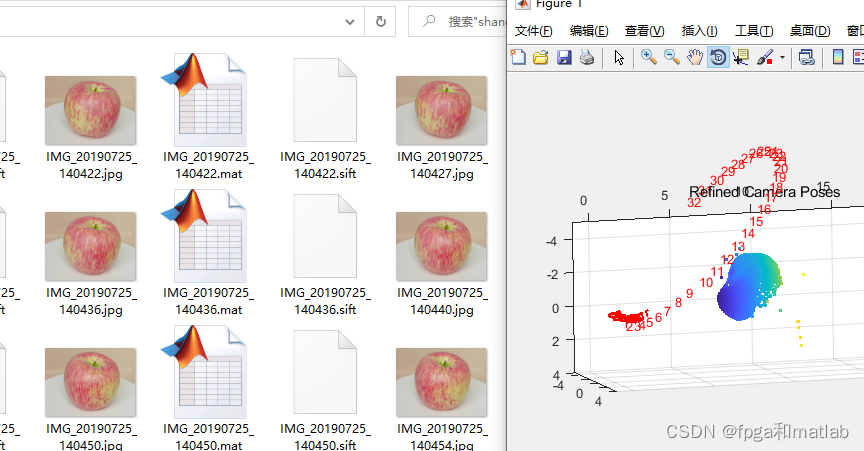
本课程学习成果预览
(二维图像序列与对应的目标三维重建效果,相机位于目标上方,所以重建目标上半部分)
目录
1.软件版本
MATLAB2017b(VisualSFM工具箱高版本MATLAB可能会有bug,所以这里采

欢迎订阅《FPGA学习入门100例教程》、《MATLAB学习入门100例教程》
目录
MATLAB2017b(VisualSFM工具箱高版本MATLAB可能会有bug,所以这里采

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























