




 本文介绍了基于终端约束的模型预测控制(MPC)在稳定性与可行性方面的分析。通过数据驱动的方法,终端约束可以增强MPC的性能,不仅与数据驱动结合,还能扩大可行域。文章提供了计算安全集和终端约束的代码示例,并对比了有无终端约束的轨迹效果,强调了终端约束在控制策略中的重要性。
本文介绍了基于终端约束的模型预测控制(MPC)在稳定性与可行性方面的分析。通过数据驱动的方法,终端约束可以增强MPC的性能,不仅与数据驱动结合,还能扩大可行域。文章提供了计算安全集和终端约束的代码示例,并对比了有无终端约束的轨迹效果,强调了终端约束在控制策略中的重要性。
关于MPC终端约束问题,其实就是稳定性与可行性的分析,欢迎感兴趣的一起交流探讨,如有错误,还请指正,不胜感激。
基于终端约束的MPC控制,理论部分可以参考资料:
【Linear MPC入门】Model Predictive Control Algorithm, Feasibility and Stability - 知乎
这里,终端约束数据可以用数据驱动来代替,这样就可以把MPC与数据驱动相结合起来,但是好处不仅仅是为了与数据驱动联合,终端约束有什么好处呢?上面的参考资料也给出了参考。
对于一般MPC而言,相当于零点为终点,不过,使用Zero Terminal Constraint是非常苛刻的,导致可行域减少了很多。同时,MPC的预测的步数N越少,可行域也越少。
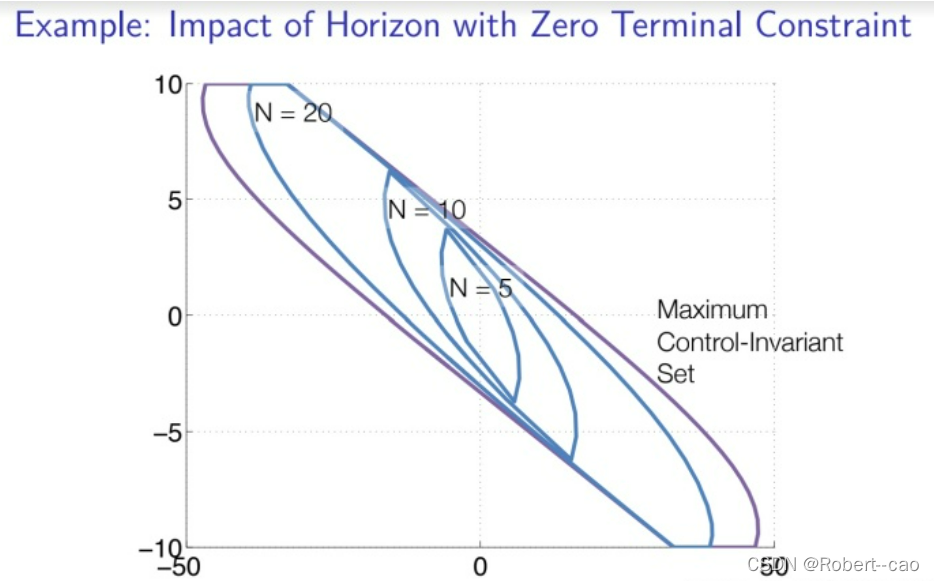
对于可行域使用凸多面体表示,如上图:
function [ invariantGoalSet ] = computeInvariantGoalSet( A, B, Q, R )
[K,~,~] = dlqr(A,B,Q,R);
Acl = A-B*K;
w_max = 0.05;
W = Polyhedron([w_max w_max; w_max -w_max; -w_max -w_max; -w_max w_max]);
X{1} = zeros(size(Acl,1),1); % Initialize the set
for i = 1:10000
Set = Acl*X{i} + W; % Propagate  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5903
5903





 到【灌水乐园】发言
到【灌水乐园】发言







