




关于真实水下定位系统的测距、测角等观测量的误差特性,基于鲁棒性布局定位锚点,结合节点间的协同来进行路径规划、导航,给出课题推荐
通过将协同路径规划与自适应粒子滤波深度融合,构建了完整的水下协同导航技术框架。协同路径规划基于GDOP优化改善几何构型,自适应粒子滤波通过鲁棒性设计和参数自适应应对真实海洋误差特性。MATLAB仿真例程提供了可运行的实现参考,为后续研究和工程应用奠定基础。
课题介绍
协同路径规划
协同路径规划( C o l l a b o r a t i v e P a t h P l a n n i n g Collaborative Path Planning CollaborativePathPlanning)是指在多个水下平台(如水下机器人或自主潜航器)之间进行协调,以优化整个任务的执行效率和定位精度。对于水下平台的协同路径规划,需要考虑以下几个方面:
- 避免碰撞与冲突:多个水下平台需要在同一环境中协作,因此,路径规划算法必须避免平台之间的碰撞,并根据任务需求进行调整。
- 信息共享与位置协调:水下平台之间需要共享位置信息,以确保每个平台在协作过程中保持一定的间距,同时避免冗余覆盖区域。
- 任务与环境适应:路径规划必须根据任务目标(如采集数据、探测海底物体等)和实时环境(如水流、障碍物等)进行动态调整。
常见的协同路径规划方法包括基于图的算法、基于最优控制的算法和基于分布式算法的路径规划方法。目标是通过优化各平台的路径,使得每个平台在协作过程中能够更高效地完成任务。
自适应粒子滤波(APF)
自适应粒子滤波(Adaptive Particle Filter, APF)是一种扩展粒子滤波的方法,具有自适应性,可以根据系统动态和噪声特性实时调整粒子的权重或数目,从而提高滤波精度和计算效率。其主要优点是能够应对高度非线性、非高斯噪声和多模态的环境,广泛应用于水下定位、目标跟踪和导航等领域。
自适应粒子滤波的工作流程:
- 初始化粒子:根据初始状态分布生成粒子,粒子数目通常较多,保证覆盖整个状态空间。
- 粒子传播:使用系统动态模型将粒子传播到下一个时刻,生成预测的粒子位置。
- 自适应权重调整:根据观测信息(例如水下传感器的数据)更新粒子的权重。自适应调整策略会根据系统噪声变化动态调整粒子的分布。
- 重采样:对粒子进行重采样,保留权重较高的粒子,去除权重较低的粒子,确保有效粒子的数量。
关键词
自适应粒子滤波( A P F APF APF),水下定位,协同路径规划
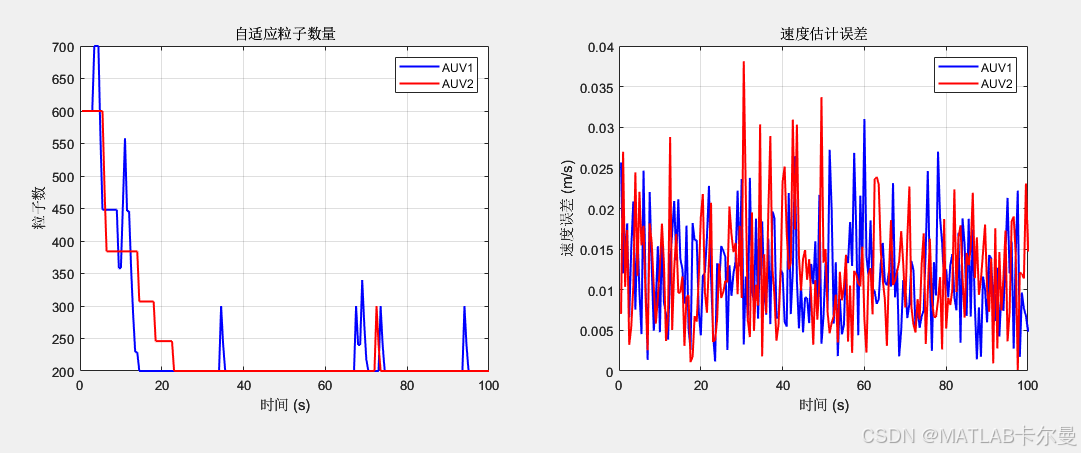
MATLAB例程演示结果
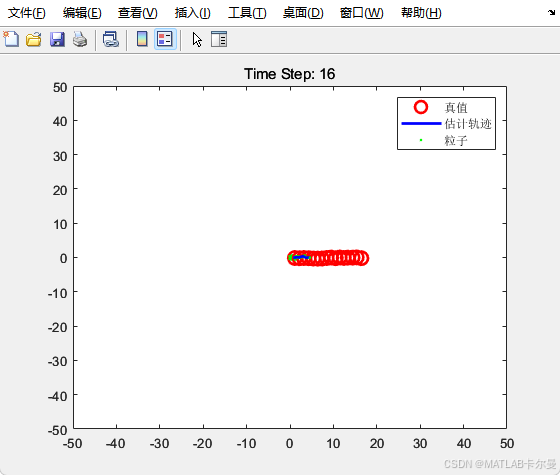
粒子滤波的动态绘图:
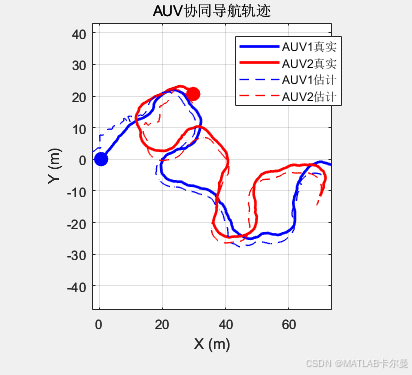
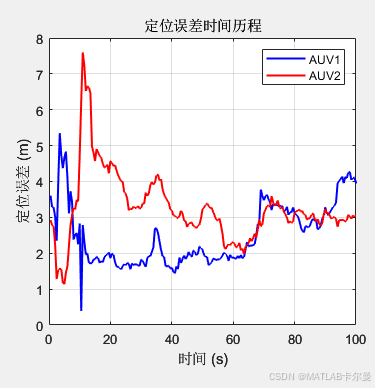
AUV协同导航的轨迹(真值与估计值对比):
本文是当前前沿研究的课题推荐,基于大量的数据整合、识别、归纳和一些个人的想法。试图在导航、定位的方向研究中提供有价值的研究问题,为项目选题奠定基础。
个人观点,仅供参考,也欢迎大家共同讨论
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 3640
3640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











