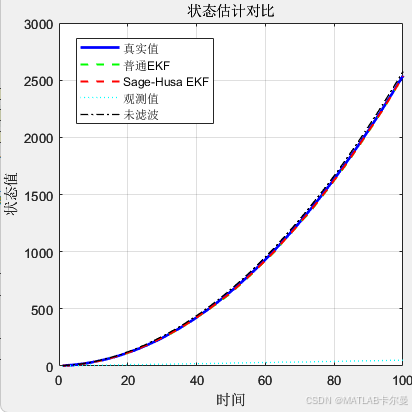
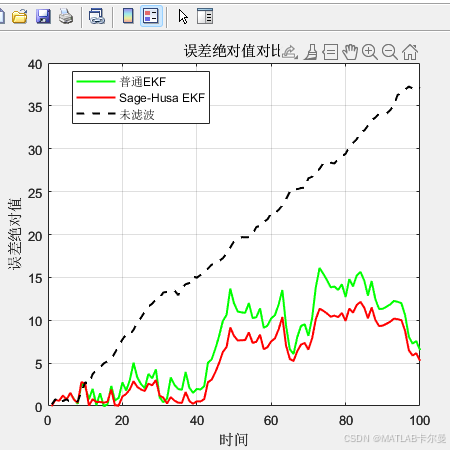
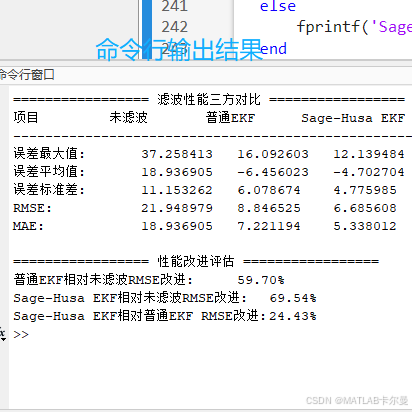
使用Sage Husa方法,给EKF添加未知Q和R情况下对QR的自适应。使用一维的状态量和观测量为基准,对比了滤波前、标准EKF和本文的的Sage Husa自适应EKF的误差。 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行 文章目录 运行结果 MATLAB源代码 程序详解 主要算法 结果与性能评估 运行结果 状态对比曲线: 误差对比曲线: 命令行输出的误差统计特性: MATLAB源代码 完整代码如下: % 一维非线性状态、非线性观测的Sage Husa自适应EKF例程 % 作者:matlabfilter % 2025-09-28/Ver1 clear; %清空工作区变量 clc;
 1002
176
1002
176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文

























