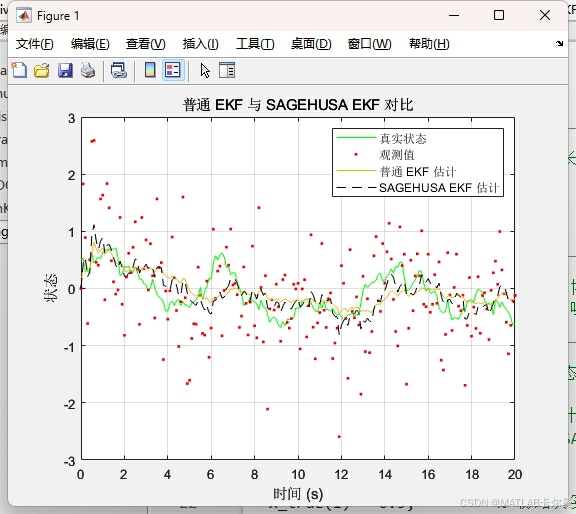
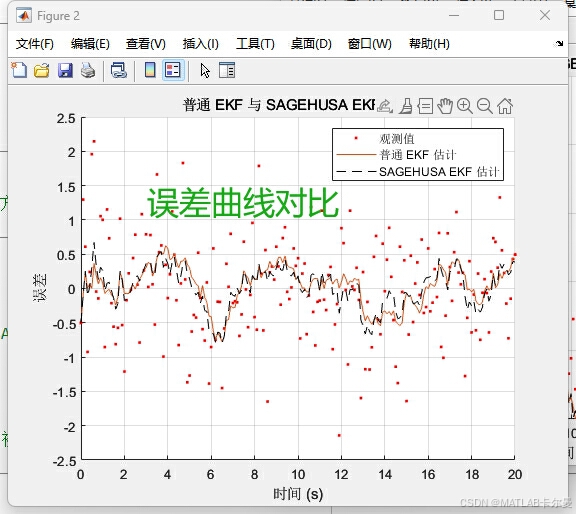
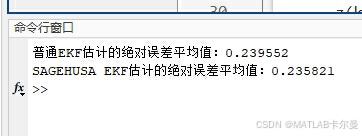
本文给出一个MATLAB代码,基于扩展卡尔曼滤波器(EKF)的Sage-Husa滤波算法编写,主要用于对非线性系统状态的估计。以下是代码的详细介绍,包括主要功能、实现步骤及其应用场景。 文章目录 代码运行结果 源代码 代码解析 代码功能概述 主要参数设置 初始化状态 系统模型和观测值模拟 EKF和Sage-Husa滤波的实现 结果可视化 误差分析 应用场景 总结 代码运行结果 估计值对比: 估计误差对比: 绝对误差的对比曲线: 误差平均值输出: 源代码 下面的源代码复制粘贴到MATLAB空脚本中,即可运行: % 基于EKF的sage-husa滤波例程 =% 2024-11-12/Ver1




 3197
2421
3197
2421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言







 订阅专栏 解锁全文
订阅专栏 解锁全文

























