




三维状态量的UKF例程(严格的组合导航推导)使用基于15维误差状态模型:位置(3)、速度(3)、姿态(3)、陀螺偏差(3)、加速度计偏差(3);观测量为6维:位置(3)、速度(3)
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
文章目录
- 运行结果
- MATLAB源代码
- 程序详解
-
- 状态建模
- 真实轨迹与传感器数据生成
- 纯IMU积分解算
- UKF滤波流程
- 结果与对比
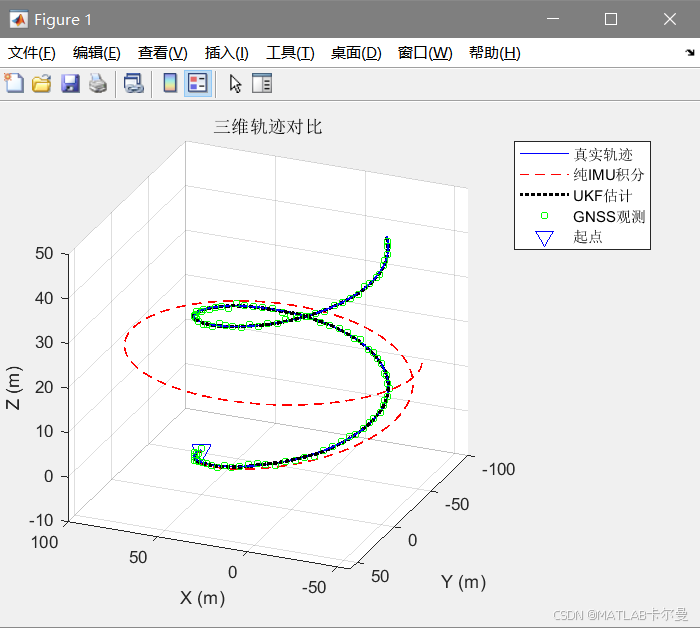
运行结果
三轴轨迹对比:
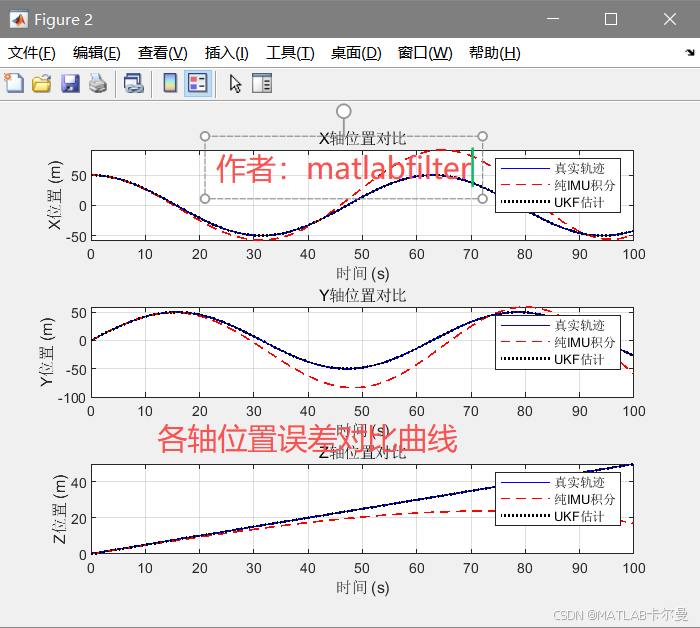
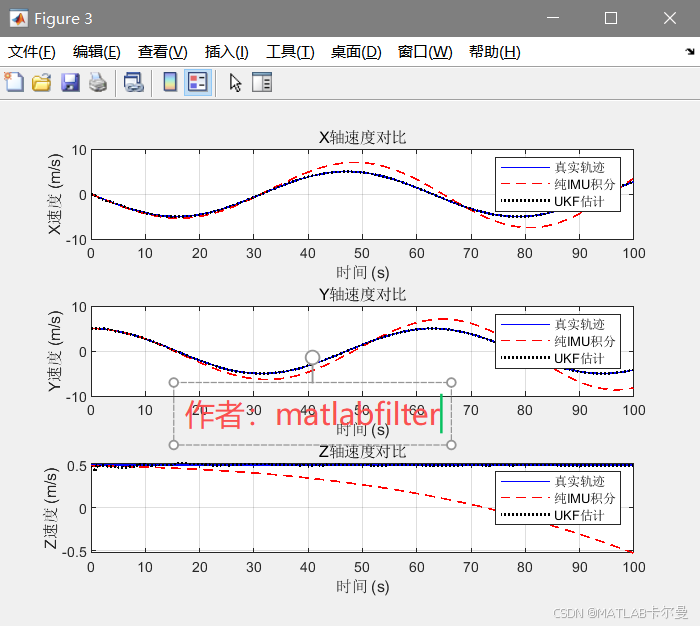
各轴位置和速度变化曲线:
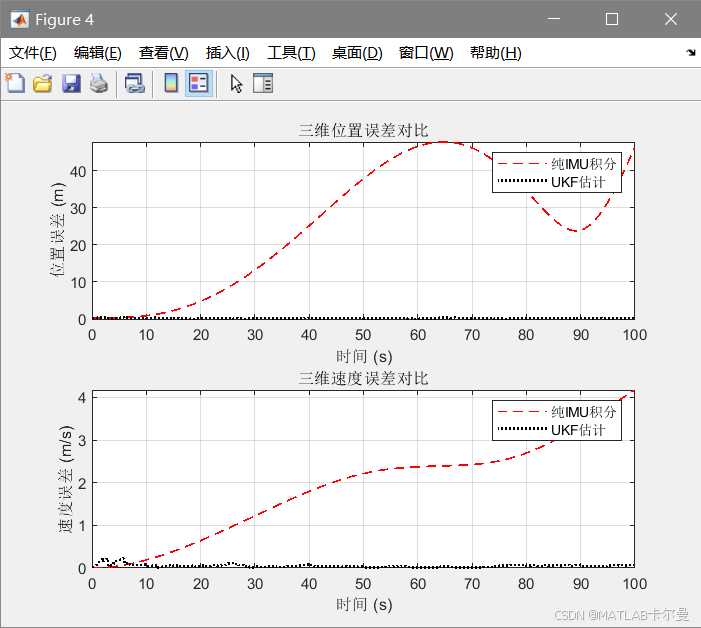
三维空间中的位置误差、速度误差变化曲线:
MATLAB源代码
完整代码如下:
% 三维状态量的UKF例程(严格的组合导航推导)
% 基于15维误差状态模型:位置(3)、速度(3)、姿态(3)、陀螺偏差(3)、加速度计偏差(3)
% 作者:matlabfilter
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 248
248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











