




该MATLAB代码实现了基于无迹卡尔曼滤波器(UKF)的交互式多模型(IMM)滤波算法,旨在跟踪目标在不同运动模式下的状态,例如匀速直线运动(CV)和匀速圆周运动(CT)。
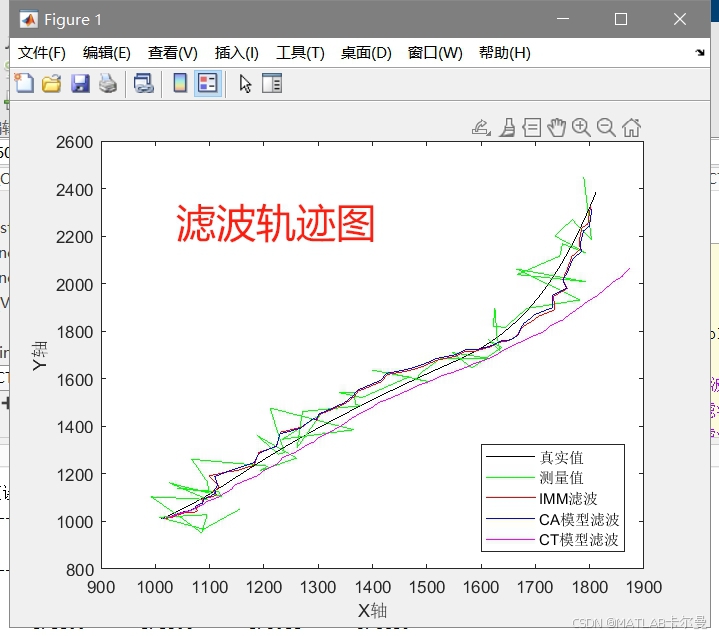
使用 plot 函数展示真实值、测量值和不同模型(IMM、CV、CT)滤波后的结果,比较各模型的估计误差。
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
文章目录
- 运行结果
- MATLAB源代码
- 程序详解
-
- 🧠 程序核心思想
- 📐 模型介绍与公式
-
- 1. 匀速运动模型(CV)
- 2. 匀速转弯模型(CT)
- 📊 主要功能模块
-
- ✅ 模拟真实轨迹
- ✅ 单模型 UKF 滤波
- ✅ IMM UKF 滤波
运行结果
轨迹真值与不同方法得到的对比:
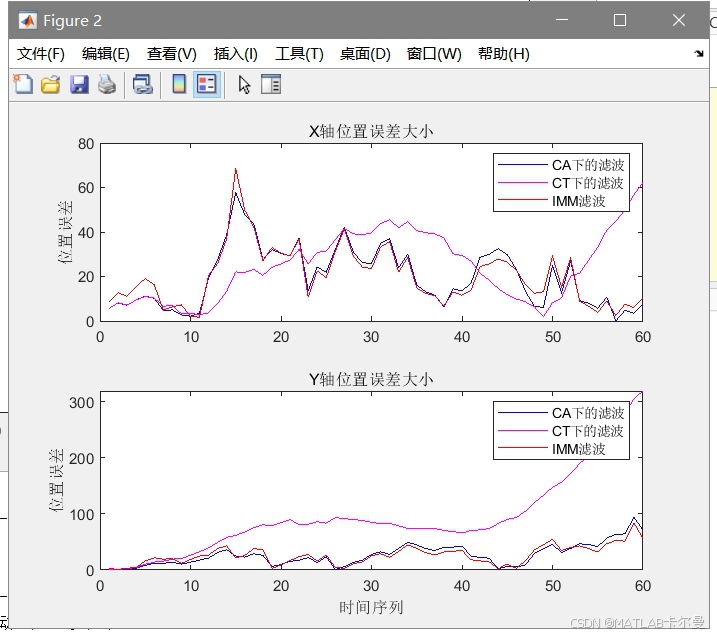
位置误差对比曲线:
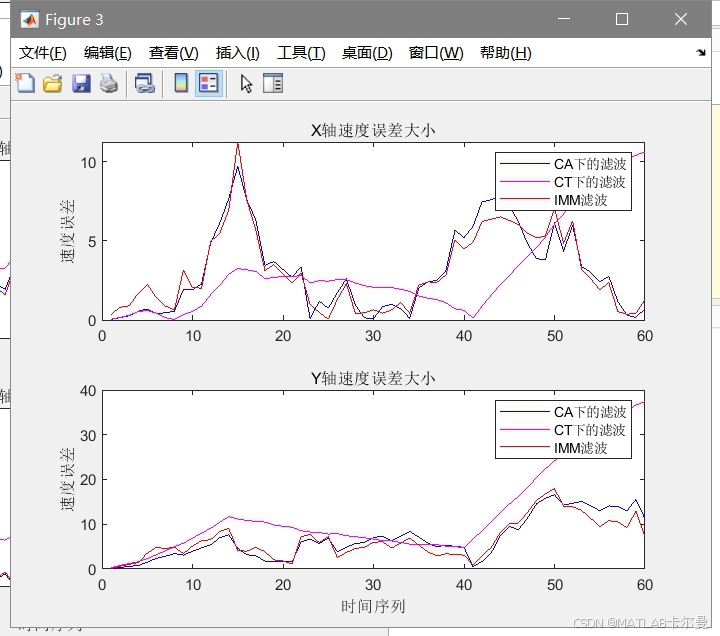
速度误差对比曲线:
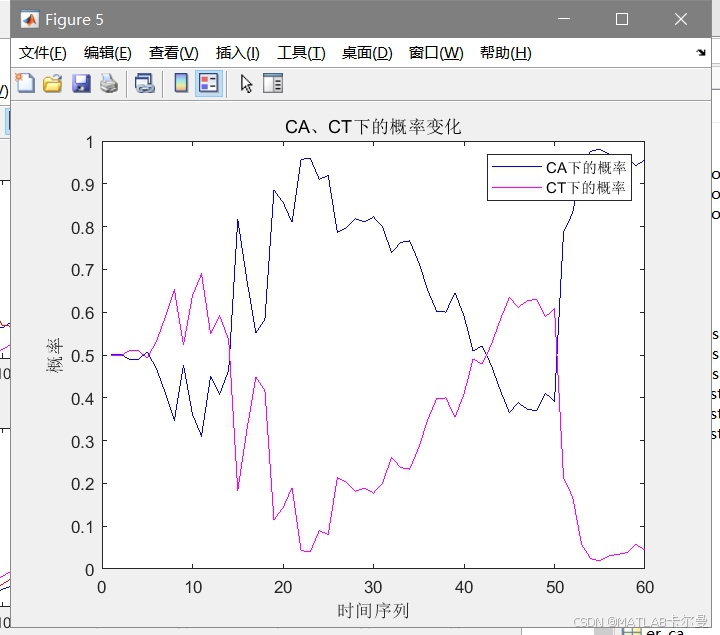
模型的概率曲线:
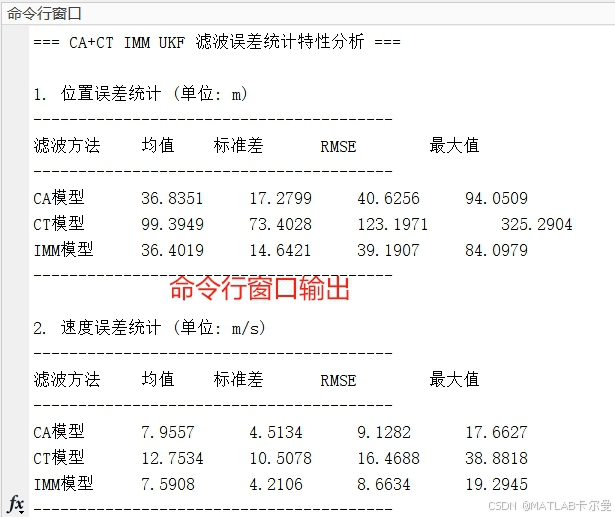
命令行窗口输出的误差统计特性对比:
MATLAB源代码
完整代码如下:
% CV和CT模型组成的IMM UKF
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 500
500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











