




该MATLAB代码实现了基于无迹卡尔曼滤波器(UKF)的交互式多模型(IMM)滤波算法,旨在跟踪目标在不同运动模式下的状态,例如匀速直线运动(CV)和匀速圆周运动(CT)。
运行结果
各方法估计的轨迹:

两个轴的位置误差曲线:

X轴和Y轴速度误差曲线:

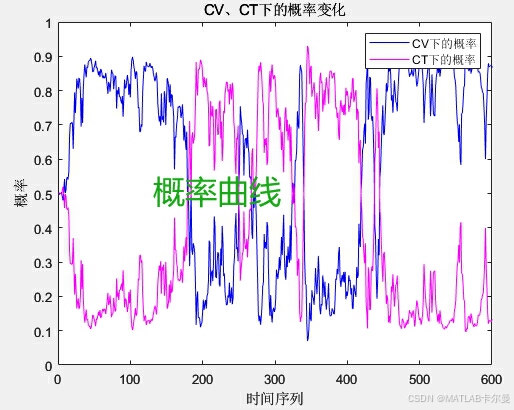
两部分的概率曲线:
源代码
以下为部分源代码:
% CV和CT模型组成的IMM UKF
% 2024-11-06/Ver1
%% 建模
clear; %清空工作区
clc; %清空命令行
close all; %关闭所有窗口(主窗口除外)
rng(0); %固定随机种子,让每次运行得到的结果相同
N = 600; %定义仿真时间为600
T = 1; %定义采样间隔为1
x0 = [1000,10,1000,10]'; %状态初始化,四项为别为x轴位置、速度、y轴位置、速度
xA = []; %预定义输出的状态
% CV匀速运动
% x = A1*x + G1*sqrt(Q1)*[randn,randn]';
A1 = []; %定义匀速运动时的状态转移矩阵
G1=[] ; %设置匀速运动时的输入向量转移矩阵
Q1=0.01*diag([1,1]); %设置状态转移协方差矩阵
% CT匀速圆周运动
程序介绍
以下是代码的主要组成部分和功能介绍:
1. 初始化和参数设定
- 清理环境:通过
clear、clc和close all命令清空工作区、命令行和关闭所有图形窗口。 - 随机种子:使用
rng(0)固定随机种子,以确保每次运行代码时产生相同的随机数。 - 仿真设置:定义仿真时间
N、采样间隔T,并初始化目标状态x0,包括位置和速度。
2. 运动模型定义
- CV模型:设置匀速运动的状态转移矩阵
A1和输入矩阵G1,以及状态协方差矩阵Q1。 - CT模型:通过自定义函数
CreatCTF和CreatCTT生成匀速圆周运动的状态转移矩阵和输入矩阵,并设置相应的协方差矩阵Q2。
3. 生成真实轨迹数据
- 使用循环生成目标的真实位置数据
xA,首先模拟目标进行匀速直线运动,然后切换到匀速圆周运动,最后再返回匀速直线运动。
4. IMM滤波器实现
- 观测模型:构建观测矩阵
H,并设置观测噪声协方差矩阵R。 - 模型初始化:定义初始状态的转移概率矩阵
Pi,初始概率u1和u2,以及初始协方差矩阵P0。 - 卡尔曼滤波:分别实现 CV 和 CT 模型的UKF滤波,更新状态和协方差。
5. 状态预测和更新
- 在主循环中,使用混合概率计算每个模型的状态预测,并根据观测更新状态估计和协方差。
- 最终融合各个模型的状态,输出综合状态估计
X_imm。
6. 结果可视化
- 使用
plot函数展示真实值、测量值和不同模型(IMM、CV、CT)滤波后的结果,比较各模型的估计误差。
7. UKF函数
- 状态转移矩阵函数:
CreatCTF和CreatCTT用于生成CT模型的状态转移矩阵和输入矩阵。 - UKF实现:
UKF函数用于执行无迹卡尔曼滤波,包括状态预测、观测更新等步骤。
结论
该代码实现的IMM UKF算法有效地融合了不同运动模型的信息,适用于动态目标跟踪。通过不同运动模型的切换与更新,能够提高对目标状态的估计精度和稳定性。用户可以根据需要调整参数和模型,以适应特定的应用场景。
如有程序定制、答疑等需求,可联系作者:


















 497
497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











