




本文所述代码实现了一个一维容积卡尔曼滤波(CKF)算法,针对强非线性系统的状态估计问题。通过构建包含周期性驱动项和非线性饱和效应的动态模型(
2.5x/(1+x²) + 8cos(1.2t)),以及非线性观测方程(x²/20),展示了CKF在无需雅可比矩阵线性化的情况下,利用确定性采样点(容积点)精确传递状态分布的能力。代码对比了滤波前后的状态误差,验证了CKF在抑制噪声和提升估计精度上的有效性。订阅专栏后,可查看完整的代码,可复制粘贴,粘贴到MATLAB空脚本中即可直接运行
文章目录
- 运行结果
- 代码介绍
-
- 初始化与动态模型
- CKF算法实现
- 结果分析与可视化
- 代码特点
- 改进方向
- 核心公式说明
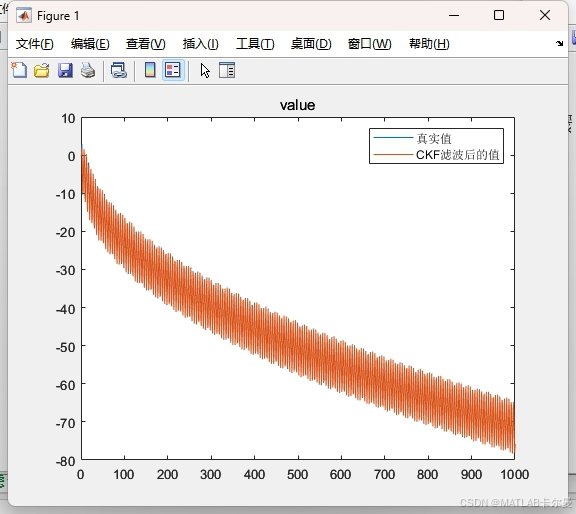
运行结果
状态量曲线(两个颜色离得近,不容易看出来区别,区别在误差图里面更明显):
- 状态误差曲线:
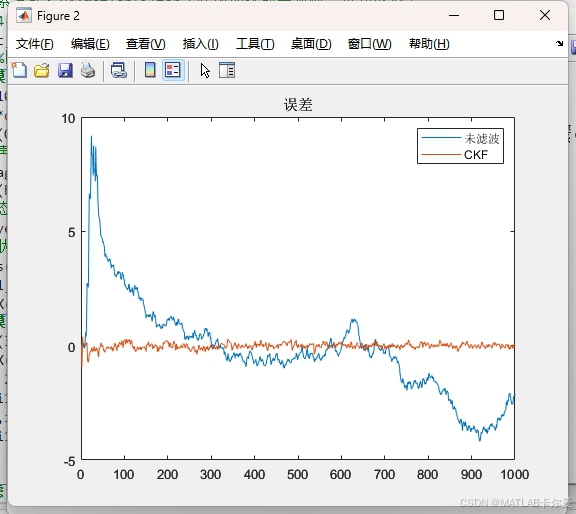
-
滤波前后CDF图像:
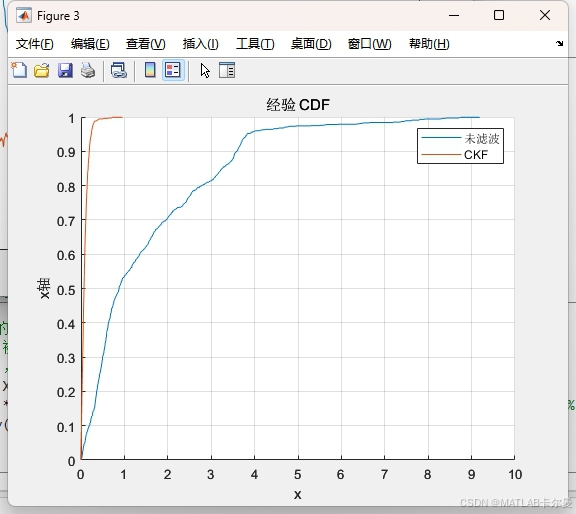
-
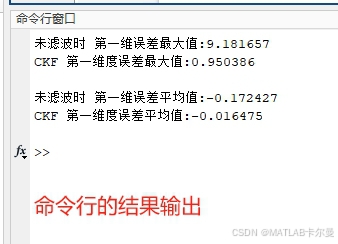
命令行输出结果的截图:
代码介绍
初始化与动态模型
- 噪声设置:一维过程噪声协方差
Q=0.01和观测噪声协方差R=1,生成对应的高斯噪声序列w和<

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











