




本程序通过采用多重观测下的EKF算法,结合航向角、三轴速度、三轴位置等数据,提供了一种高效的状态估计解决方案,适用于各种动态定位需求。通过实时数据处理和精确估计,能够显著提升目标跟踪和导航的性能。
概述
本程序以位置、速度和航向角为观测量,构造157(15维状态量、7维观测量)的滤波,采用扩展卡尔曼滤波(EKF)进行状态估计。
主要模块
-
数据输入:
- 接收位置、速度和航向角的观测数据。
- 数据格式化,准备进行滤波处理。
-
状态预测:
- 根据运动模型预测目标的下一个状态。
- 计算状态转移矩阵和过程噪声协方差。
-
测量更新:
- 将观测数据与预测状态进行融合,更新状态估计。
- 计算卡尔曼增益,最小化估计误差。
-
结果输出:
- 输出估计的状态信息,包括位置、速度和航向角。
- 可视化结果,便于分析和评估滤波性能。
改进点
- 本程序在传统速度观测的基础上,进一步引入位置和航向角的观测数据,通过优化EKF算法,提高了状态估计的准确性和鲁棒性。
- 针对动态环境和非线性特性,进行了算法优化,确保在各种条件下都能保持良好的性能。
运行结果
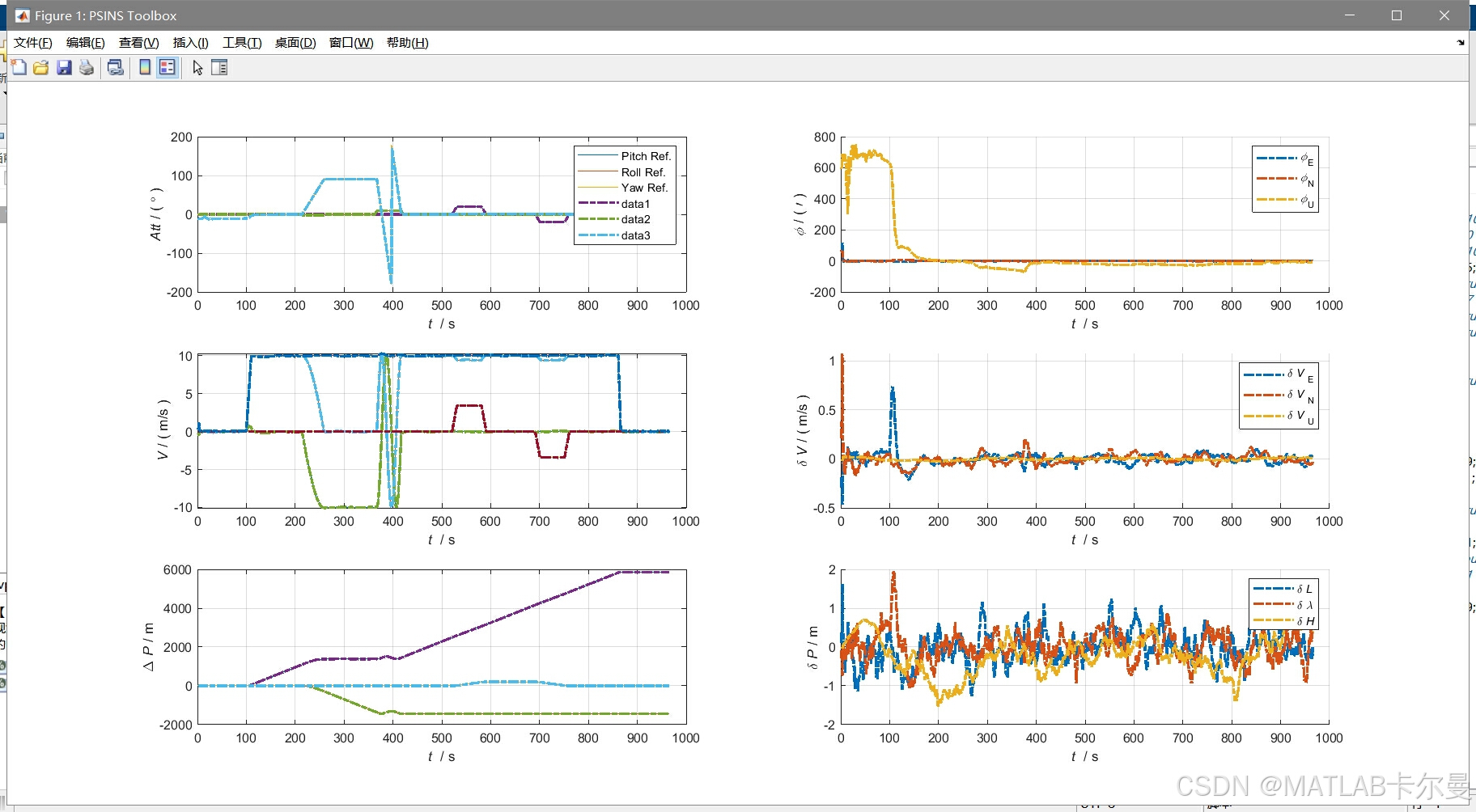
AVP及其误差曲线:
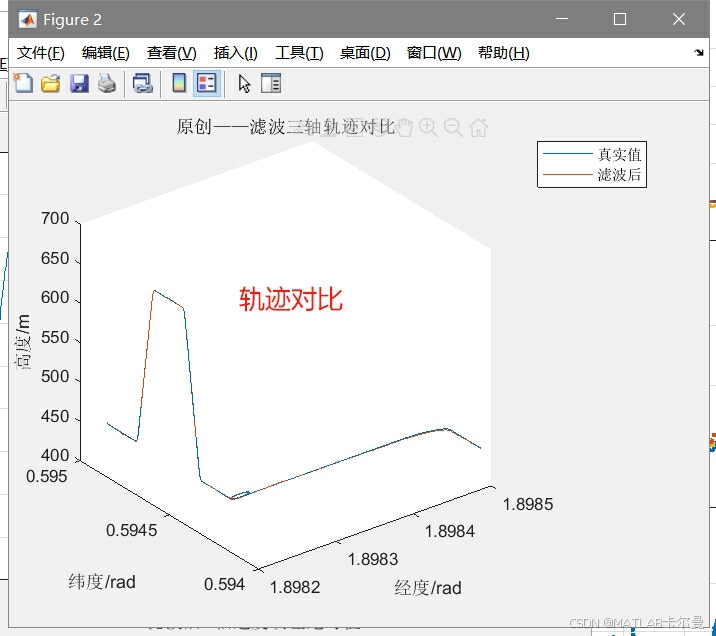
三维轨迹曲线:
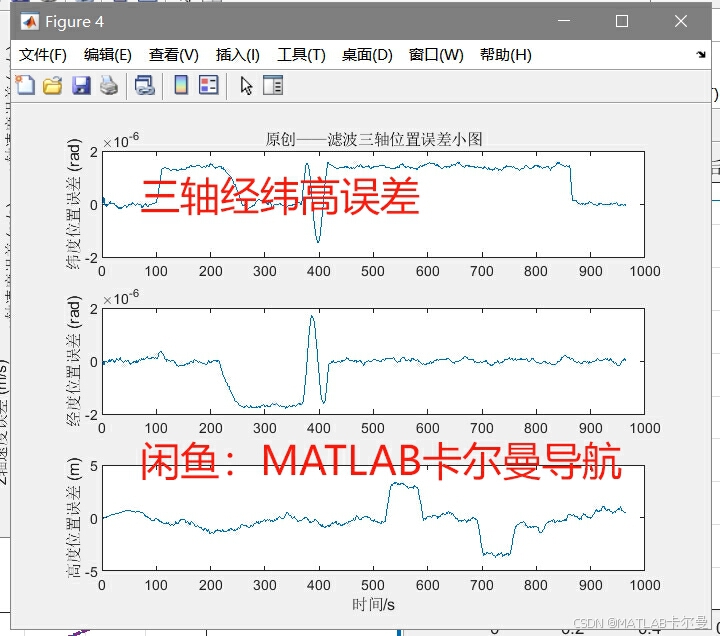
位置误差曲线:
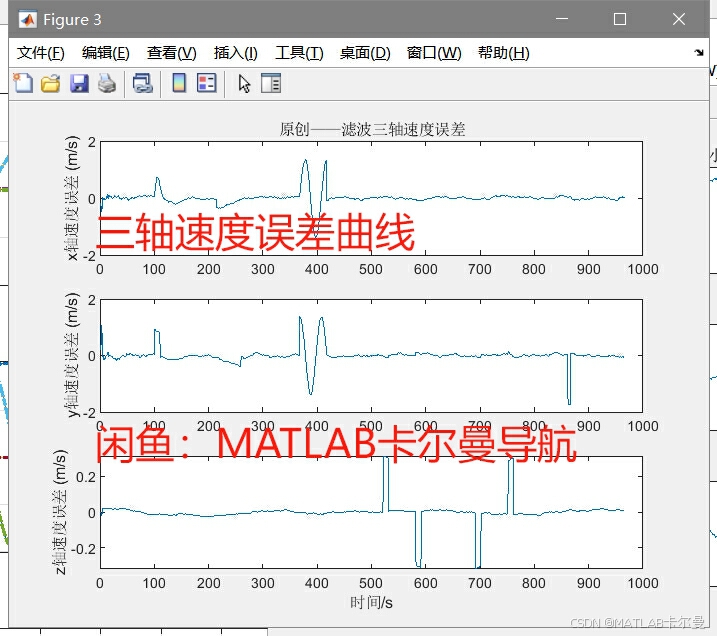
速度误差曲线:
部分代码
% 【PSINS】位置、速度、航向角为观测的157,EKF。从速度观测的EKF153改进而来
% 2025-01-24/Ver1:位置与速度为观测量
% 清空工作空间,清除命令窗口,关闭所有图形窗口
clear; clc; close all;
rng(0); % 设置随机数种子为0,以确保结果可重复
glvs % 调用全局变量设置
psinstypedef(153); % 设置PSINS类型
% 读取轨迹文件
trj = trjfile('trj10ms.mat');
% 初始设置
[nn, ts, nts] = nnts(2, trj.ts); % 获取时间序列的参数
% imuerr = imuerrset(0.03, 100, 0.001, 5); % (注释掉的)设置IMU误差参数
imuerr = imuerrset(8, 14, 0.18, 57); % 设置IMU误差参数
imu = imuadderr(trj.imu, imuerr); % 对IMU数据添加误差
% imuplot(imu); % (注释掉的)绘制IMU数据
% 设置初始姿态误差
davp0 = avperrset([1; 1; 10]*60, 0, [1; 1; 3]*0);
%% 速度观测EKF
ins = insinit(avpadderr(trj.avp0, davp0), ts); % 初始化惯性导航系统
rk = [1;1; 1; 1; poserrset([1;1;3])]; % 观测噪声的权重
kf = kfinit(ins, davp0, imuerr, rk); % 初始化卡尔曼滤波器
% 设置卡尔曼滤波器的噪声协方差矩阵
kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9, 1)])^2; % IMU过程噪声
kf.Rk = diag(rk)^2; % 观测噪声
kf.Pxk = diag([davp0; imuerr.eb; imuerr.db]*1.0)^2; % 状态协方差矩阵
kf.Hk = [1,zeros(1,14);
zeros(3, 3), eye(3), zeros(3, 9);
zeros(3, 6), eye(3) , zeros(3, 6)]; % 修改观测方程
kf.Pmin = [avperrset(0.01, 1e-4, 0.1); gabias(1e-3, [1, 10])].^2; % 最小协方差
kf.pconstrain = 1; % 约束条件
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/90311241
如有需求,可通过下方卡片联系作者


















 1155
1155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











