三种滤波(EKF、UKF、CKF)的对比,含MATLAB源代码




于 2024-05-01 14:25:18 首次发布

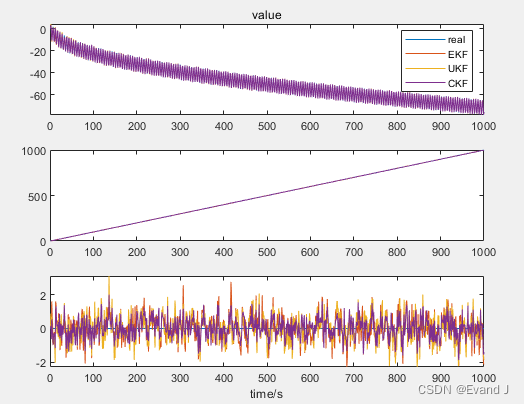
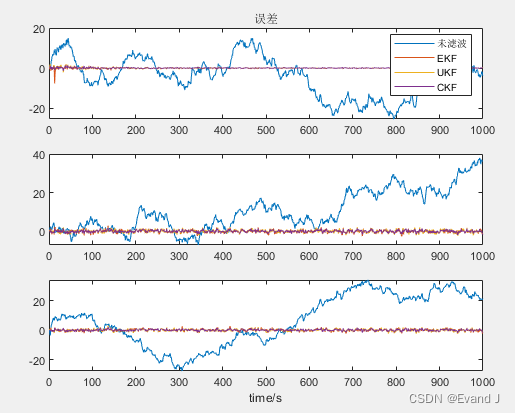
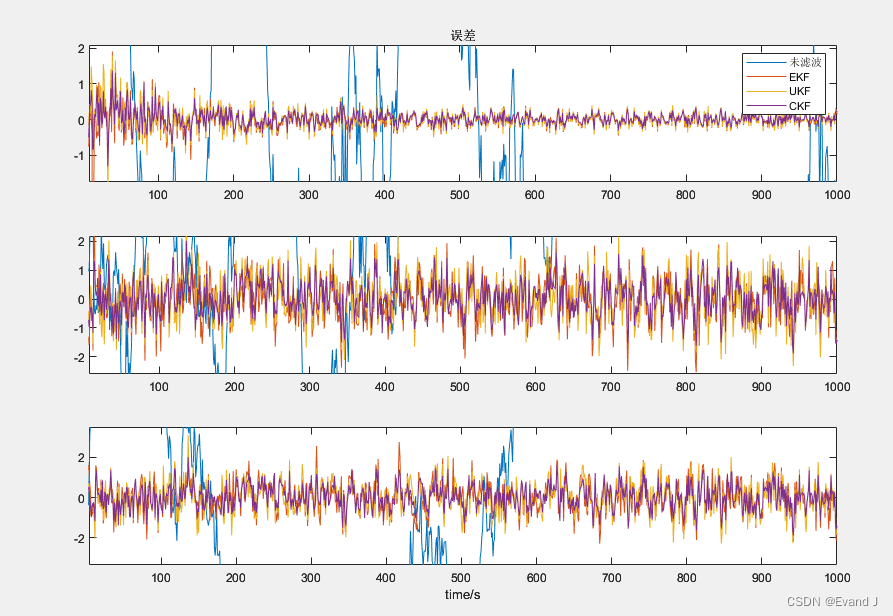
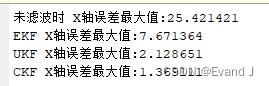
 该博客通过MATLAB模拟了三维空间中的扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF),在非线性状态更新和观测更新条件下进行。结果显示CKF在滤波效果上表现最佳,适用于高机动性的组合导航系统,如GPS+DVL。博客提供了运行结果、误差输出和程序源码供学习参考。
该博客通过MATLAB模拟了三维空间中的扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF),在非线性状态更新和观测更新条件下进行。结果显示CKF在滤波效果上表现最佳,适用于高机动性的组合导航系统,如GPS+DVL。博客提供了运行结果、误差输出和程序源码供学习参考。
该博客通过MATLAB模拟了三维空间中的扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF),在非线性状态更新和观测更新条件下进行。结果显示CKF在滤波效果上表现最佳,适用于高机动性的组合导航系统,如GPS+DVL。博客提供了运行结果、误差输出和程序源码供学习参考。
该博客通过MATLAB模拟了三维空间中的扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF),在非线性状态更新和观测更新条件下进行。结果显示CKF在滤波效果上表现最佳,适用于高机动性的组合导航系统,如GPS+DVL。博客提供了运行结果、误差输出和程序源码供学习参考。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1814
1814







