




1. 公式推导
双边TOF与双向TOF计算两次TOF的平均值不同,双边TOF是基于单边TOF测量,修正了设备之间的时钟相对偏差,双边TOF流程如下: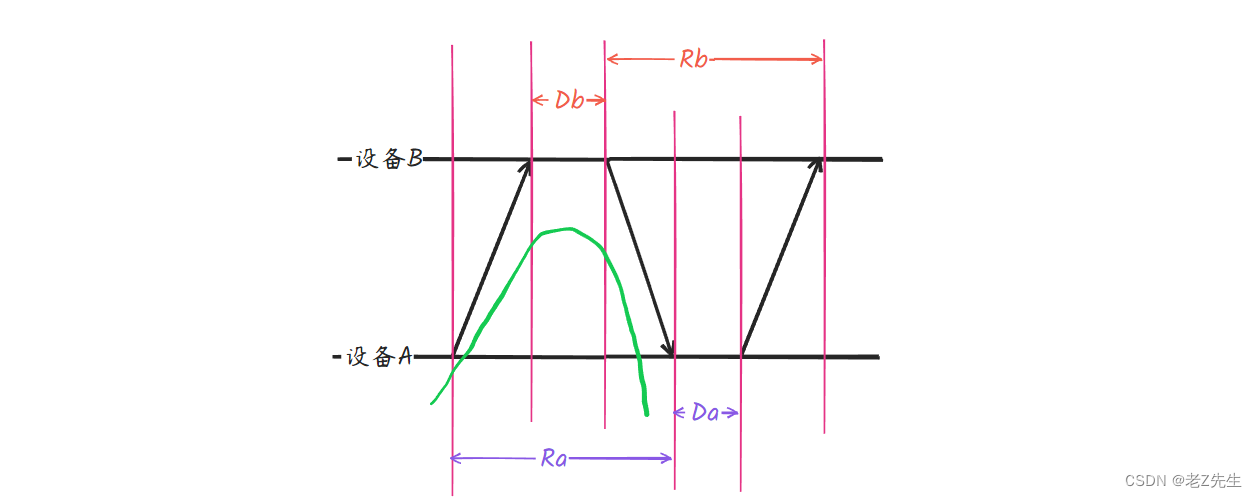
计算公式如下:
在上式中若系数k=1则双边TOF计算公式与单边TOF计算公式一致,系数k为设备时钟的相对偏差系数,可通过上面两次发送时间与两次接收时间的比值计算得到。
2. 误差推导
对双边TOF距离公式进行整理:
整理后:
双边TOF与双向TOF计算两次TOF的平均值不同,双边TOF是基于单边TOF测量,修正了设备之间的时钟相对偏差,双边TOF流程如下:
计算公式如下:
在上式中若系数k=1则双边TOF计算公式与单边TOF计算公式一致,系数k为设备时钟的相对偏差系数,可通过上面两次发送时间与两次接收时间的比值计算得到。
对双边TOF距离公式进行整理:
整理后:
 718
6576
5918
5742
718
6576
5918
5742

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















 到【灌水乐园】发言
到【灌水乐园】发言






