







 超级会员免费看
超级会员免费看
 本文介绍了PID控制理论,包括开环和闭环控制的区别,详细解析了PID的组成部分和不同类型,如位置式和增量式PID。接着,文章探讨了串级PID的优势及其在实际应用中的场景。最后,通过平衡小车的实例,阐述了如何运用PID控制来实现平衡,重点讲解了平衡原理和控制策略。
本文介绍了PID控制理论,包括开环和闭环控制的区别,详细解析了PID的组成部分和不同类型,如位置式和增量式PID。接着,文章探讨了串级PID的优势及其在实际应用中的场景。最后,通过平衡小车的实例,阐述了如何运用PID控制来实现平衡,重点讲解了平衡原理和控制策略。
开环控制
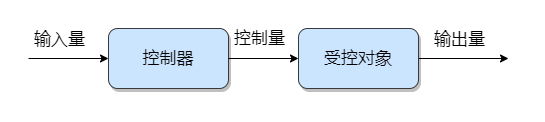
开环控制,全称开环控制系统(Open Loop Control System),又称为无反馈系统。即系统的输入可以影响输出,但是 输入不受输出影响 的系统。输入到输出的信号是单向传递的。
以下为生活中的例子:
| 控制系统 |
输入量 |
控制器 |
受控对象 |
开环控制,全称开环控制系统(Open Loop Control System),又称为无反馈系统。即系统的输入可以影响输出,但是 输入不受输出影响 的系统。输入到输出的信号是单向传递的。
以下为生活中的例子:
| 控制系统 |
输入量 |
控制器 |
受控对象 |

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























