




大家好,我是爱酱。本篇将会系统梳理卷积神经网络(CNN)中的池化(Pooling)与下采样(Downsampling)机制,包括原理、数学表达、主流方法、实际案例、可视化代码演示与工程应用建议,配合数学公式,帮助你全面理解CNN特征压缩与空间不变性的关键技术。
注:本文章含大量数学算式、详细例子说明及大量代码演示,大量干货,建议先收藏再慢慢观看理解。新频道发展不易,你们的每个赞、收藏跟转发都是我继续分享的动力!
一、什么是池化与下采样?
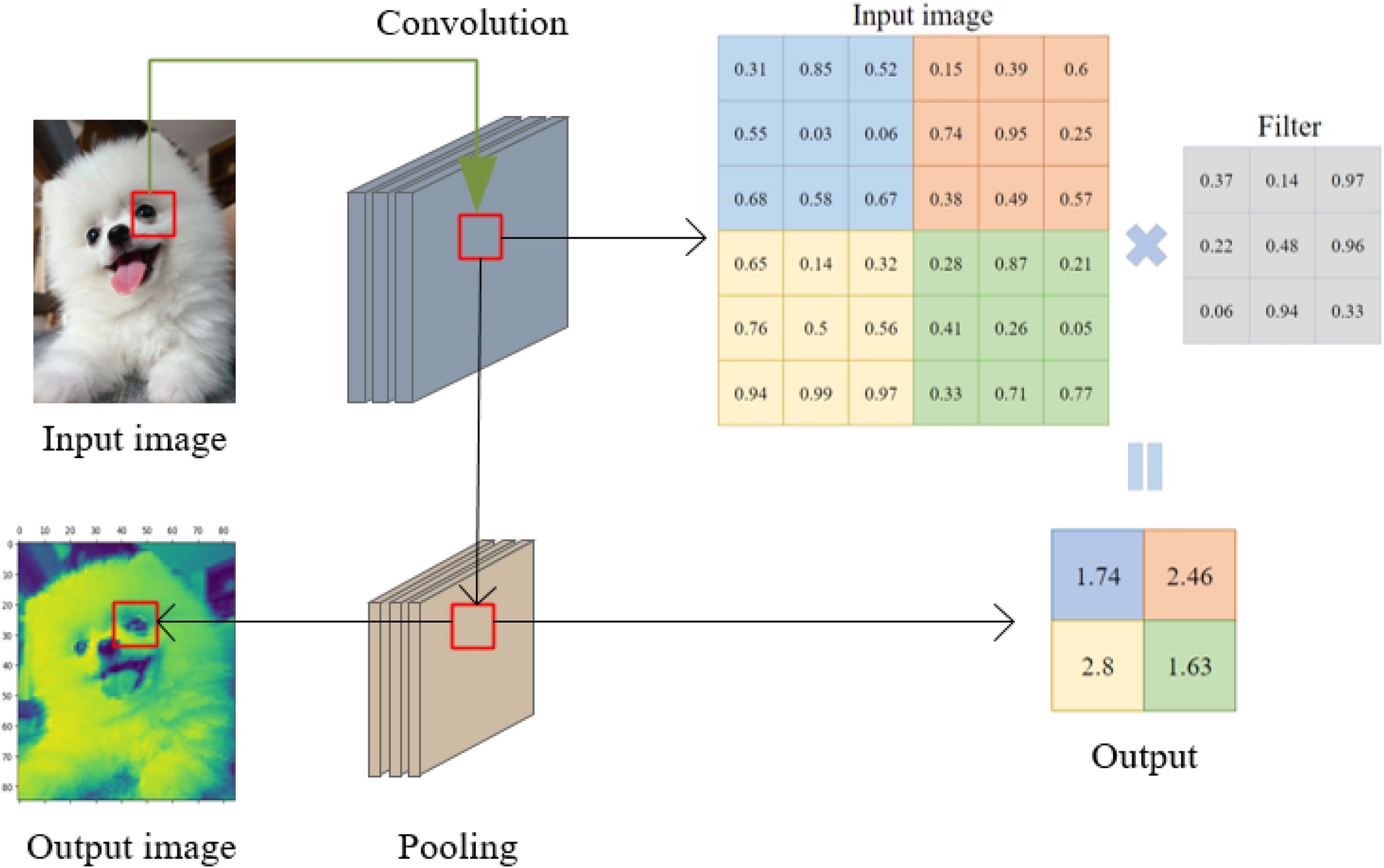
池化(Pooling)是CNN中用于降低特征图空间尺寸、减少参数和计算量、提升特征鲁棒性的重要操作。
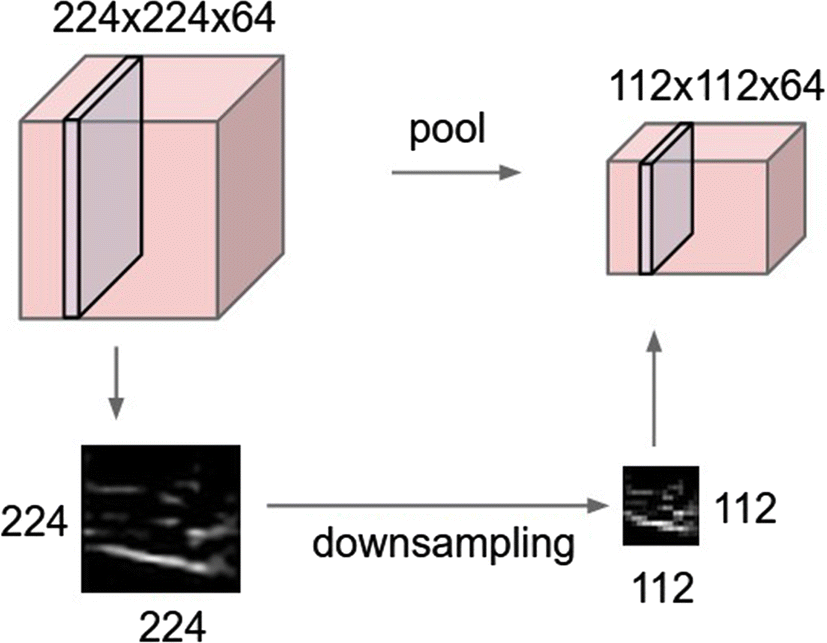
下采样(Downsampling)泛指所有降低数据分辨率的操作,池化是其最常见实现方式。
-
英文专有名词:Pooling, Downsampling, Max Pooling, Average Pooling, Global Pooling, Strided Convolution
-
本质作用:
-
压缩特征图尺寸,减少后续层计算负担
-
提取局部统计信息,提升模型对平移、旋转等扰动的鲁棒性
-
防止过拟合,增强泛化能力
-
二、主流池化方法与数学表达
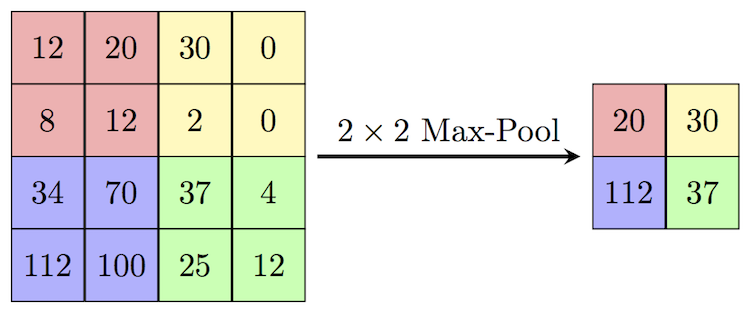
1. 最大池化(Max Pooling)
-
原理:在每个池化窗口内取最大值,突出显著特征。
-
数学表达:
其中
为池化窗口,
为输入特征图,
为池化后输出。
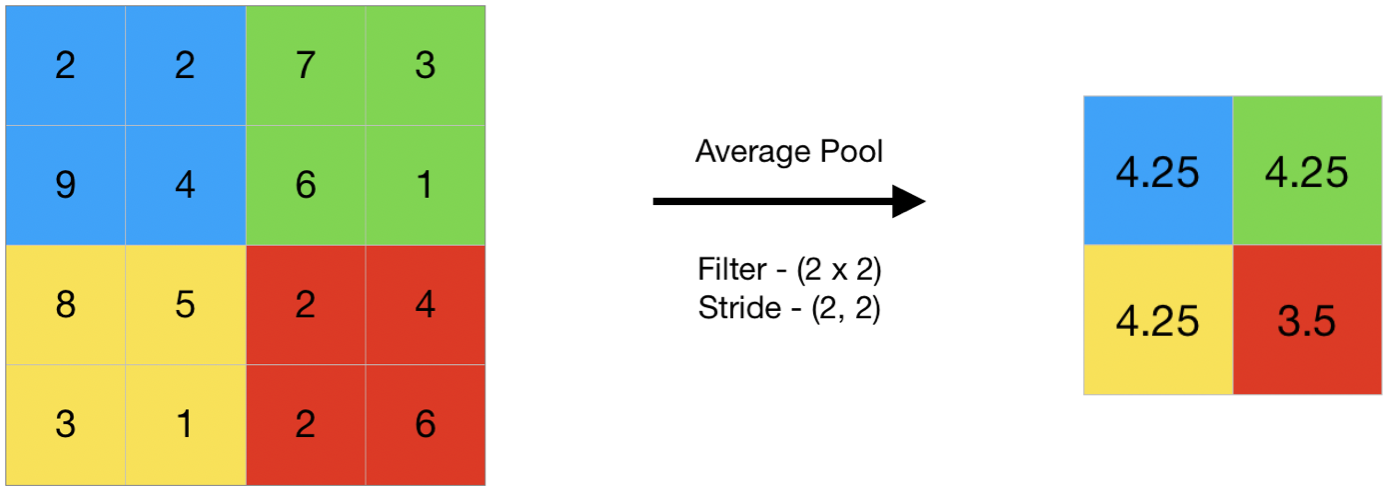
2. 平均池化(Average Pooling)
-
原理:在每个池化窗口内取均值,平滑特征响应。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1487
1487

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









