



 这篇博客介绍了ROS2如何在Windows平台上与CoppeliaSim无缝集成,为机器人和人工智能爱好者提供了全新的学习资源。内容包括Webots+ROS2+Windows的教程链接,展示了工业机器人协作、巡线小车等丰富案例。现在CoppeliaSim也支持ROS2,并且之前的ROS2案例可以直接导入使用。Windows平台的一键安装教程和即将推出的CoppeliaSim+ROS2+Windows教程为学习者带来更多便利。
这篇博客介绍了ROS2如何在Windows平台上与CoppeliaSim无缝集成,为机器人和人工智能爱好者提供了全新的学习资源。内容包括Webots+ROS2+Windows的教程链接,展示了工业机器人协作、巡线小车等丰富案例。现在CoppeliaSim也支持ROS2,并且之前的ROS2案例可以直接导入使用。Windows平台的一键安装教程和即将推出的CoppeliaSim+ROS2+Windows教程为学习者带来更多便利。
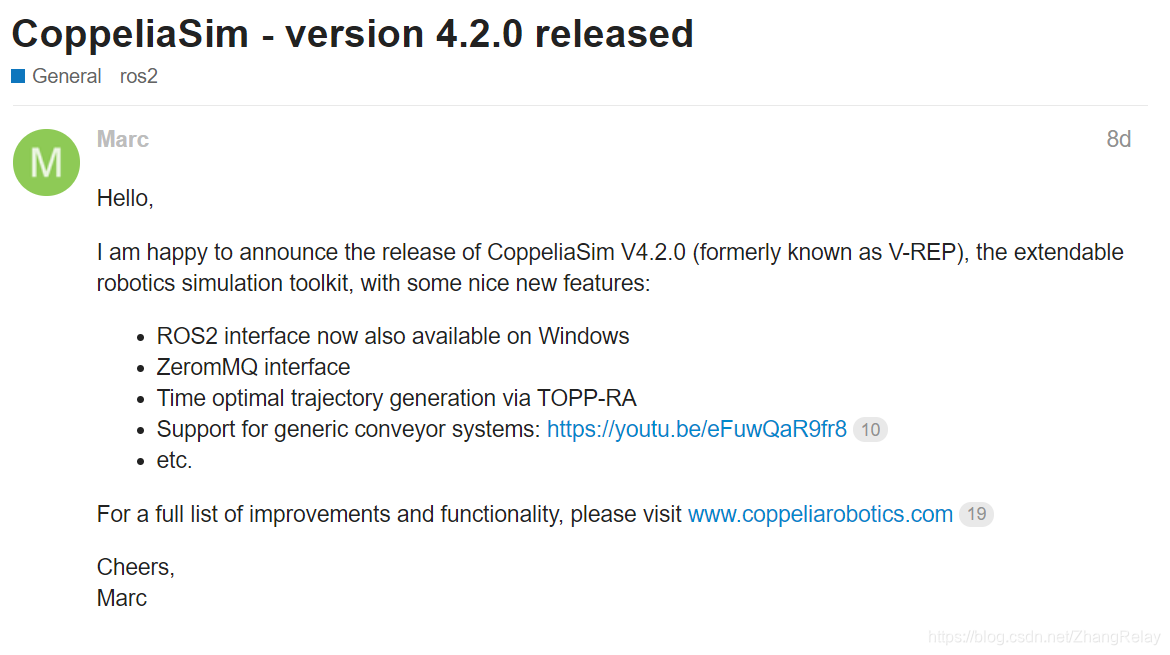
新版内容适用于Windows+Linux,其实大部分机器人和人工智能爱好者还是经常用win平台,机器人操作系统ROS已经完美无缝全兼容win平台,现在CoppeliaSim也加入这一阵营之中,相关趣味案例后续更新。
Webots+ROS2+Windows教程可以参考如下博文:
涵盖工业机器人协作,巡线小车,视觉导引和激光SLAM导航机器人等丰富案例!



如有兴趣点击上述链接查看案例,此处仅给出一个链接^_^
现在又加入了
CoppeliaSim
CoppeliaSim
CoppeliaSim
CoppeliaSim
之前的ROS2案例可以直接导入并使用的!!!
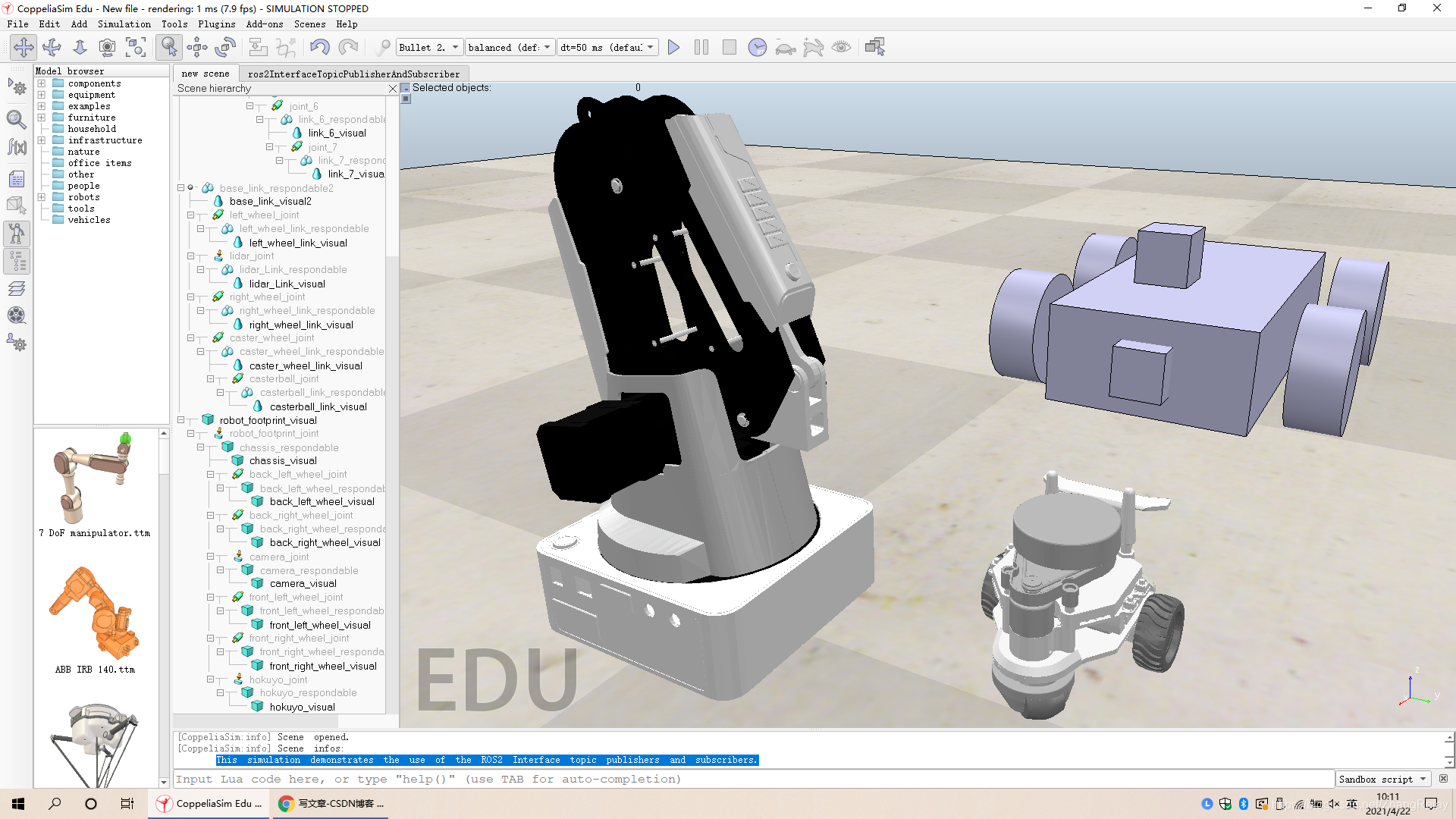
天宝迷你(tianbotmini),魔术手,和土味mobot,都全部支持ROS2仿真学习,愉快玩耍不可或缺!
一切尽在windows平台,一键安装教程参考如下(ROS2安装):
提供离线安装包,双击安装方便省心^_^如遇问题自助解决,加班太多实在抱歉。。。
CoppeliaSim+ROS2+Windows的教程晚些时候测试后推出,欢迎各位朋友多多提建议!感谢感恩。


















 1315
1315

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











