




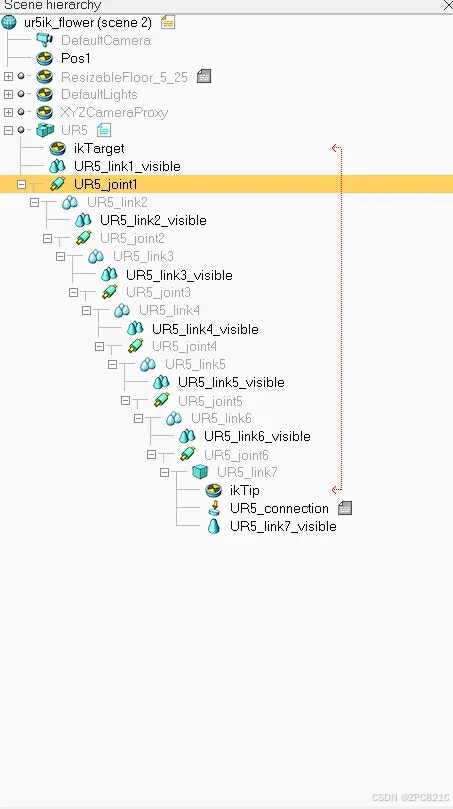
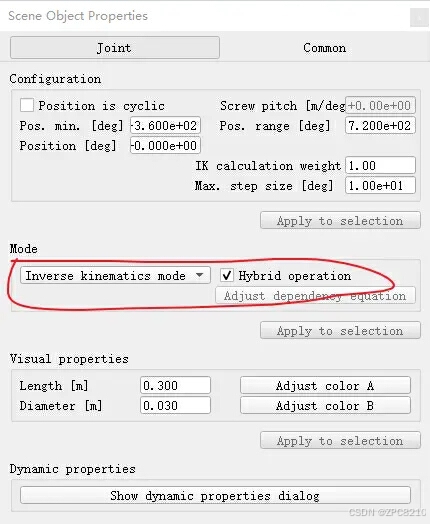
1.点击UR5_joint1上的图标,弹出scene object properties,再设置mode,将其设置为inverse kinematics mode,并且勾选上hybrid oper
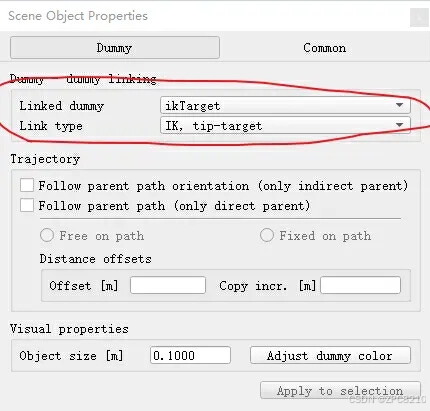
2.为机械臂设置dummy对
点击菜单栏---add,选中dummy,更改名称。创建两个dummy,一个命名为ikTip,另一个命名为ikTarget。在点击dummy,设置 配对。选择需要配对的对象即可。
3.创建ik group
选中ur5,再点击tool,选择calculation module properties 。
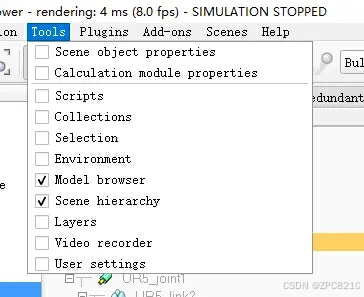
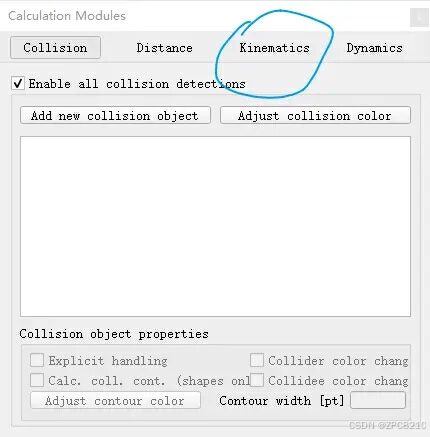
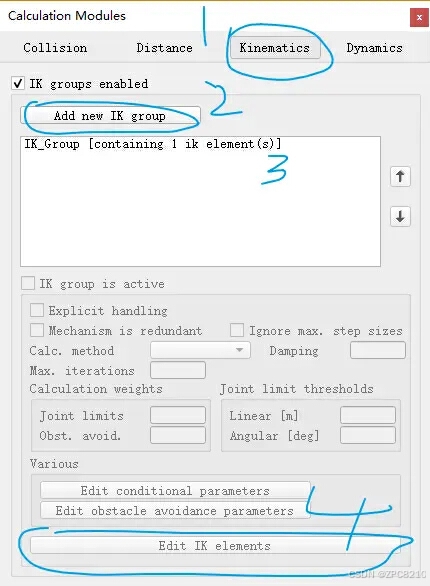
点击kinematics,再点击add new ik group,空白框出现IK_Group,可以选择命名。第四步,点击edit IK elements.
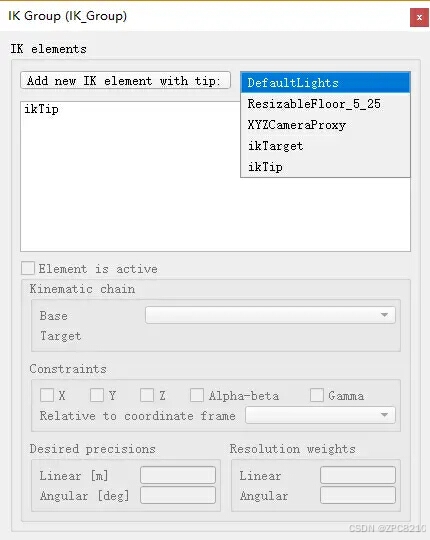
IK elements中先选择需要添加的tip,再点击添加即可。
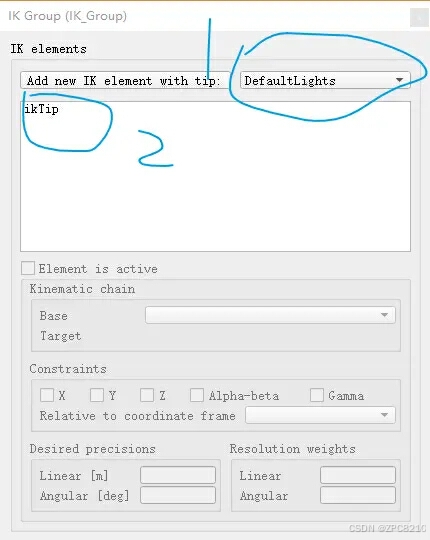
完成之后,再设置target的位置。应当把target的位置设置在ur5机械臂的工作空间中。<如果,没有这样设置,会导致机械臂走不到目标点,而随处旋转。>


















 1107
1107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









