



本章旨在通过分析三个不同领域(民用航空、工业物联网与军事电子战)的具体案例,深入探讨信号检测、参数估计与信息融合理论在实际系统中的应用与挑战。我们将重点对每个案例中的核心技术问题进行数学建模,并详细推导其背后的算法原理与关键约束。
12.1 航电数据链探测需求与约束(空域安全案例)
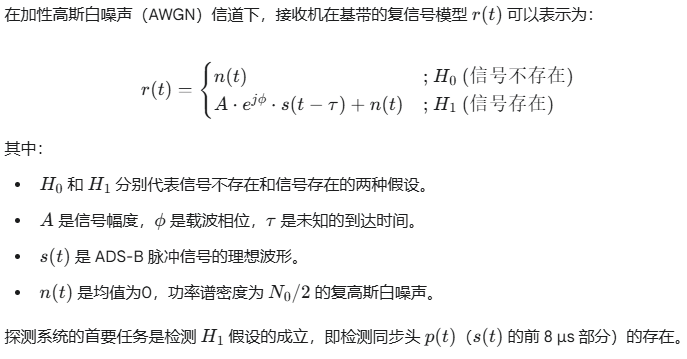
民用空域安全监测系统(如被动监视雷达或频谱管理系统)的核心需求之一是有效探测和解码非合作的航电数据链信号,其中广播式自动相关监视(ADS-B)1090 ES(Extended Squitter)信号是最具代表性的目标。
12.1.1 信号模型与检测问题
ADS-B 1090 ES 信号是一种基于脉冲位置调制(PPM)的下行链路信号,其数据包(Packet)由一个固定的8微秒(μs)同步头(Preamble)和112比特的数据块(Data Block)组成。同步头由4个脉冲构成,其精确位置在 0, 2, 3.5, 4.5 μs(或 1, 3, 8, 10 μs,取决于参考点)。
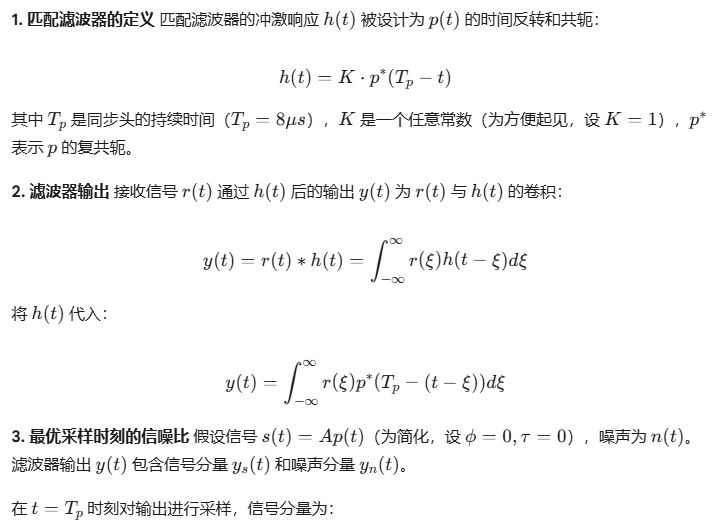
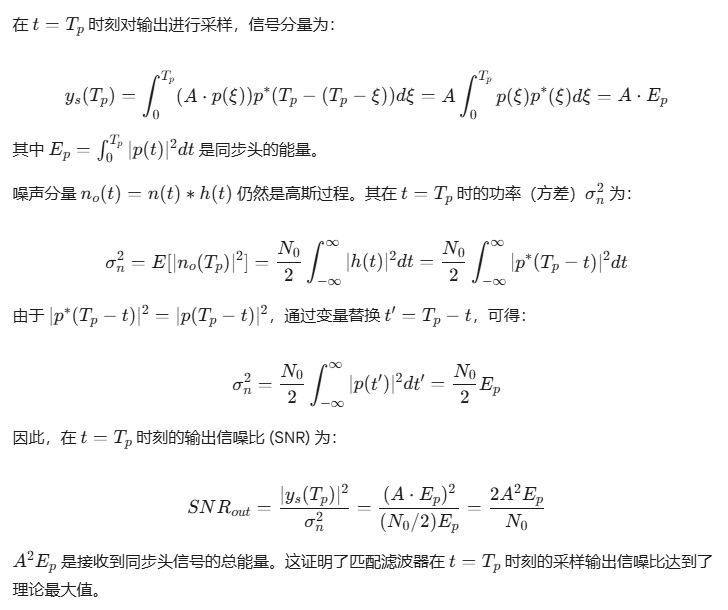
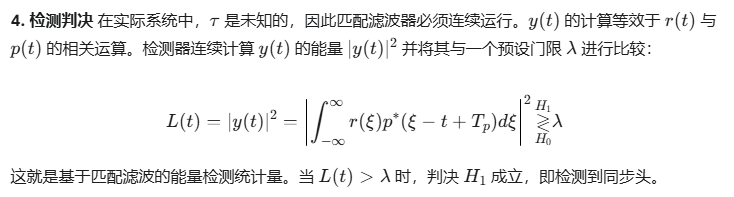
12.1.2 基于匹配滤波的检测原理推导
对于在AWGN中检测已知波形 $p(t)$ 的问题,**匹配滤波器(Matched Filter)**是实现最大输出信噪比(SNR)的最优线性时不变(LTI)系统。
1. 匹配滤波器的定义
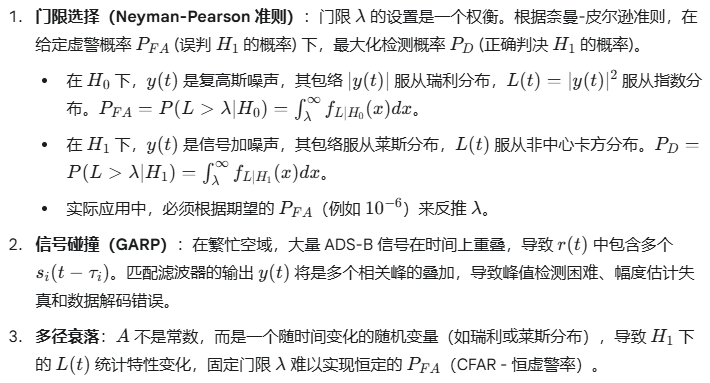
12.1.3 核心约束与挑战
12.2 工业物联网(远程控制链路)检测示例
工业物联网(IIoT)场景(如远程阀门控制、环境监测)通常使用低功耗广域网(LPWA)技术,如 LoRa(Long Range)。LoRa 采用线性扩频(Chirp Spread Spectrum, CSS)技术,以极低的信噪比(SNR)实现远距离通信。检测此类信号是 IIoT 安全监控的关键。
12.2.1 LoRa 信号模型
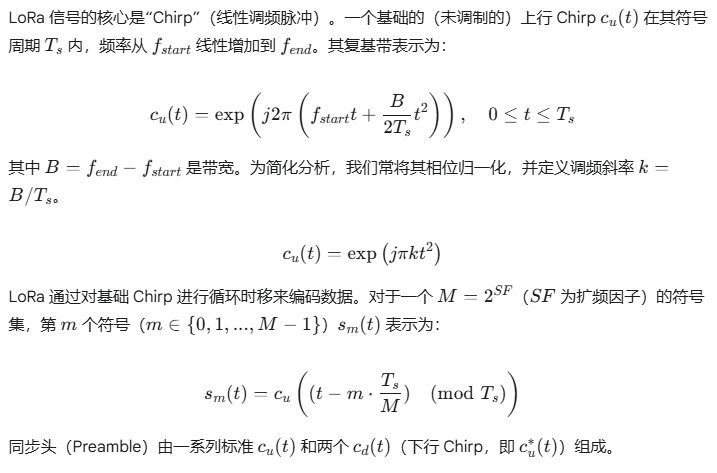
12.2.2 基于去调频(De-Chirping)的检测原理
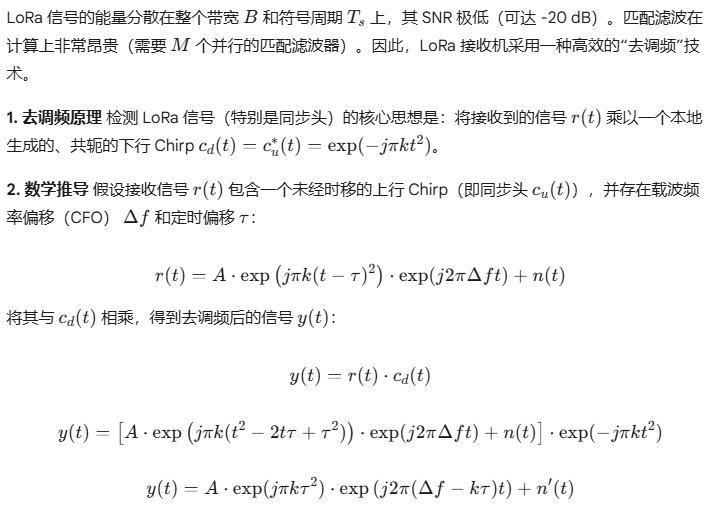
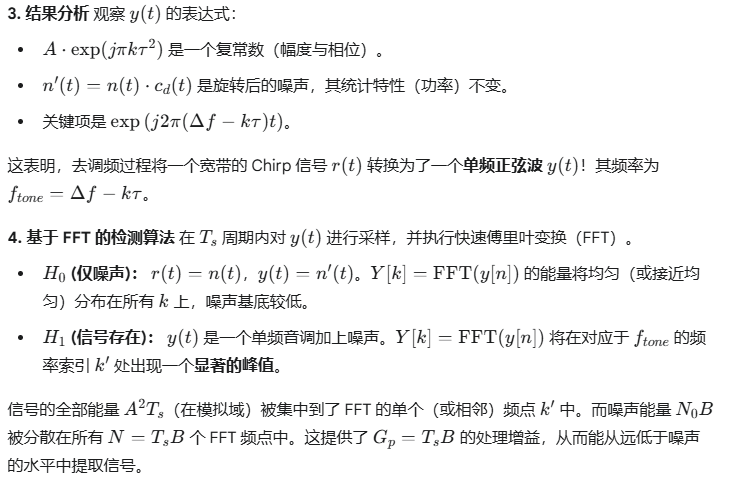
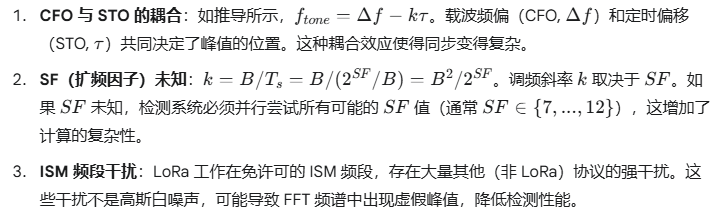
12.2.3 核心约束与挑战
12.3 军事电子战与友我识别(IFF)集成问题
在现代战场上,电子战(EW)系统和敌我识别(IFF)系统是态势感知的核心。EW 系统(特别是电子支援措施,ESM)是被动、非合作的,而 IFF 是主动、合作的。二者的集成旨在提高识别的准确性和鲁棒性,但也引入了复杂的信息融合挑战。
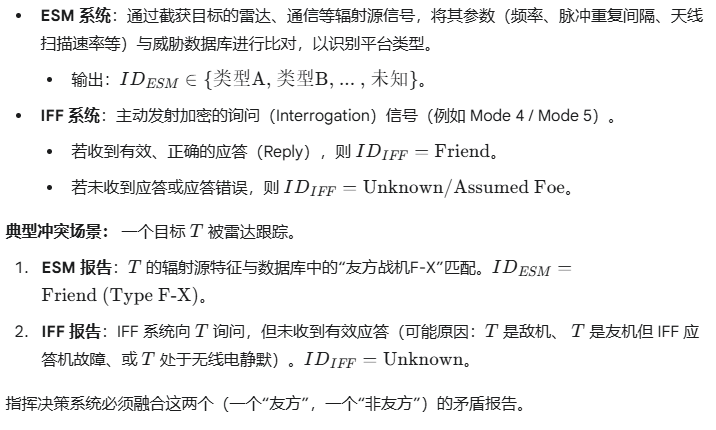
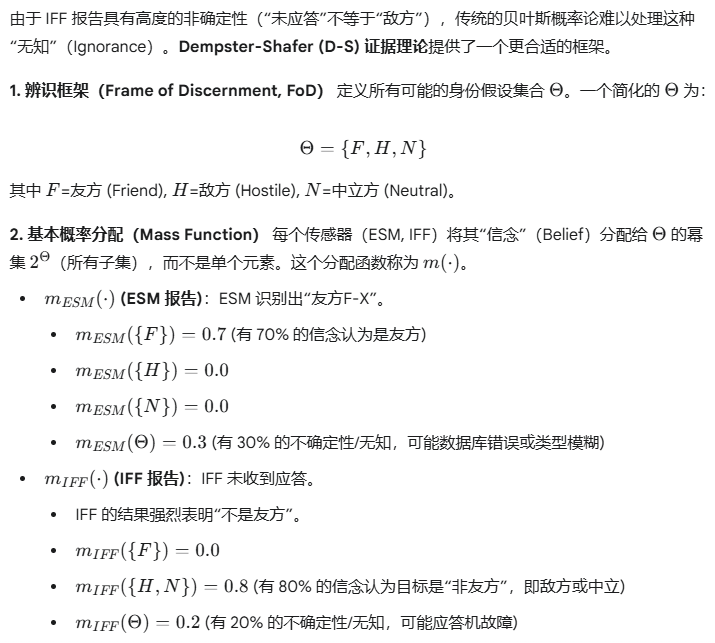
12.3.1 问题描述:数据冲突
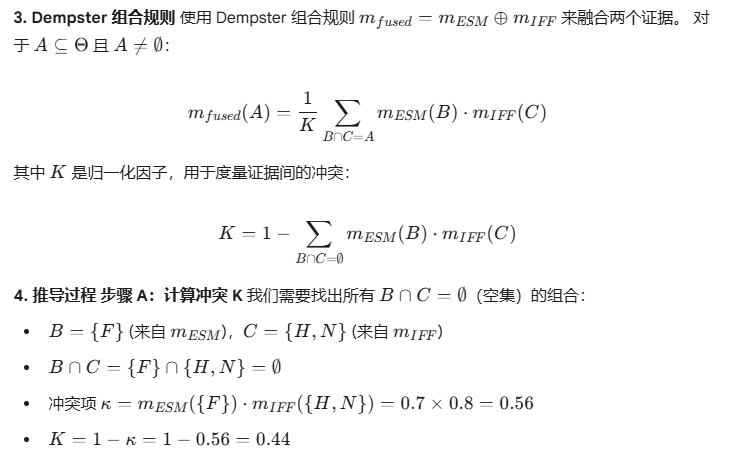
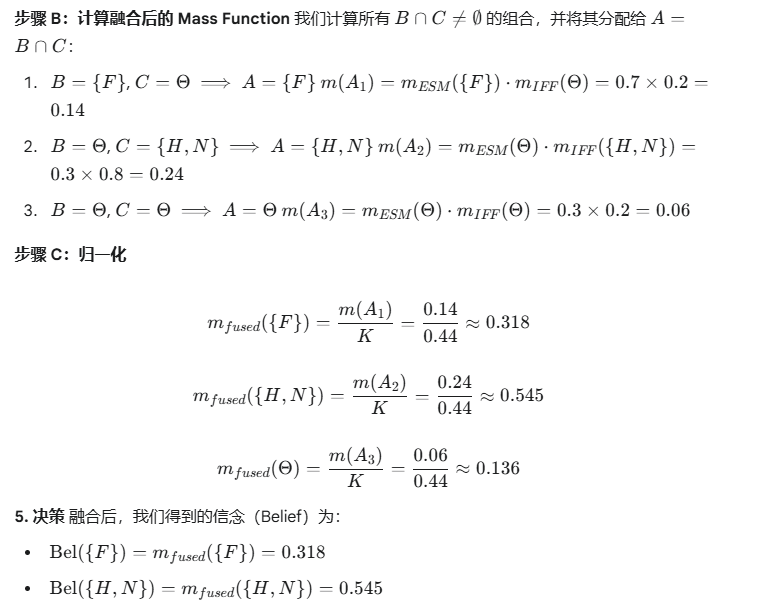
12.3.2 基于 Dempster-Shafer 理论的融合推导

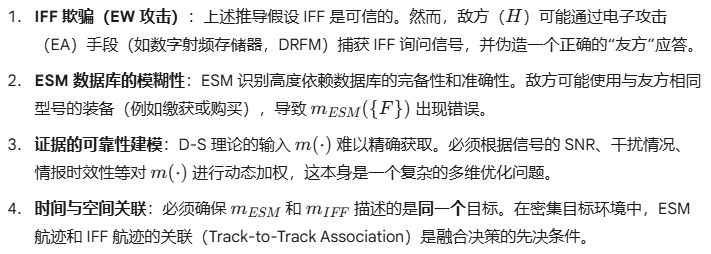
12.3.4 核心约束与挑战

















 445
445

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









