




本人今年年初才搭好的px4仿真,本来想着能用这个多写几个无人机的算法玩玩,一来能积累项目经验,二来能在日后的比赛中想着直接把之前写好的代码块搬到实机上去,比赛就能省事不少。但贴主本人也是吃了Linux Ubuntu的高开源性以及ros生态的高速迭代好大一亏,经常因为各种文件架构和教程不匹配啊、版本对不上啊种种疑难杂症而整的焦头烂额。而贴主本人大二由于平时学业较为繁忙并没有太多时间投入在不断的纠错改正纠错改正当中去,因此想通过这个在px4仿真上部署单目相机的案例来将贴主平日里积累的经验保存下来,分享出去。
本文章的食用前提是你的px4仿真已经搭的没问题了,能够正常使用;由于本篇文章主要是教大家怎么在px4仿真上搭摄像头的所以大家想知道px4如何搭建可以先移步别的大佬专门讲px4仿真搭建的文章。我后期也会给小伙伴们分享自己的搭建流程滴。
首先,ctrl+alt+t打开终端,在终端输入
roslaunch px4 mavros_posix_sitl.launch这时gazebo仿真会被打开,此时能看到一架无人机停在中间。
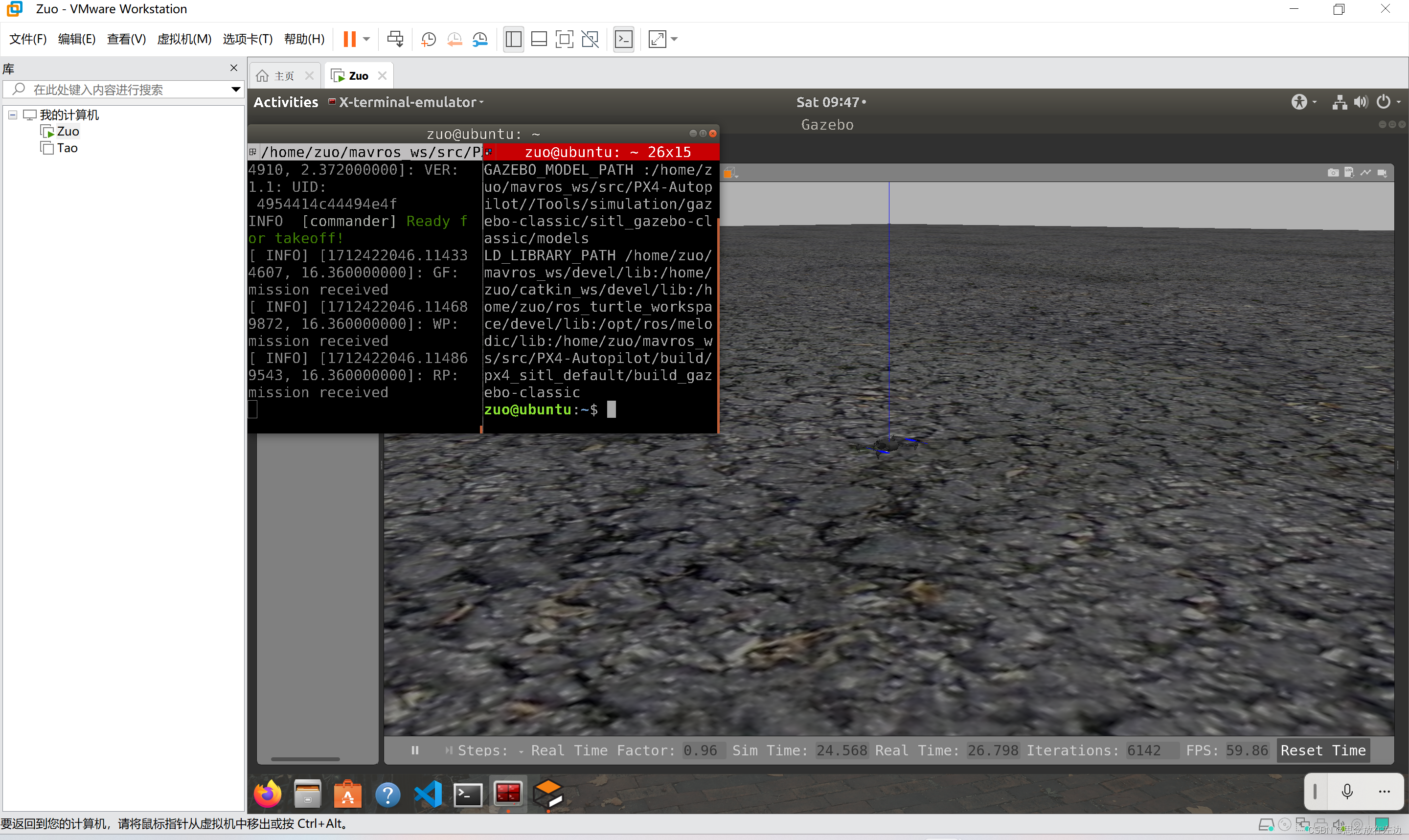 随后我们来草草验证一下这个仿真能不能正常运作,在刚刚roslaunch px4 mavros_posix_sitl.launch的终端窗口中输入
随后我们来草草验证一下这个仿真能不能正常运作,在刚刚roslaunch px4 mavros_posix_sitl.launch的终端窗口中输入
commander takeoff此时无人机会飞行到半空中2.5m左右,如果正常则证明px4仿真搭建的基本上没什么问题。(贴主已经部署过单目摄像头了所以这里会显示四条白线,如果你没有那没关系)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3286
3286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









