




 本文介绍了如何使用ORBBEC®Dabai深度相机与LIMO系统配合,实现视觉+雷达的建图和导航功能。通过启动和配置相关软件及设备,利用rtabmap算法进行实时建图和定位,最终实现机器人的自主导航。
本文介绍了如何使用ORBBEC®Dabai深度相机与LIMO系统配合,实现视觉+雷达的建图和导航功能。通过启动和配置相关软件及设备,利用rtabmap算法进行实时建图和定位,最终实现机器人的自主导航。
limo搭配ORBBEC®Dabai,可以实现视觉+雷达的建图导航功能。下面将介绍这款深度相机的使用方法。
7.1 ORBBEC®Dabai的介绍与使用
ORBBEC®Dabai 是基于双目结构光 3D 成像技术的深度相机,主要包括左红外相机(IR camera1)、右红外相机(IR camera2)、一个红外投影仪(IR projector)以及深度计算处理器(depth processor)。红外投影仪用于向目标场景(Scene)投射结构光图案(散斑图案),左红外相机以及或红外相机分别采集目标的左红外结构光图像以及右红外结构光图像,深度计算处理器接收左红外结构光图像、右红外结构光图像后执行深度计算算法并输出目标场景的深度图像。
参数名称 | 参数指标 |
左、右红外相机成像中心之间的距离 | 40mm |
深度距离 | 0.3-3m |
功耗 | 整机工作平均功耗<2W, 激光开启瞬间峰值 <5W(持续时间 3ms), 待机功耗典型值为<0.7W |
深度图分辨率 | 640400@30FPS 320200@30FPS |
彩色图分辨率 | 1920X1080@30FPS 1280X720@30FPS 640X480@30FPS |
精度 | 6mm@1m(81%FOV区域参与精度计算*) |
深度 FOV | H 67.9° V 45.3° |
彩色 FOV | H 71° V43.7° @1920X1080 |
延迟 | 30-45ms |
数据传输 | USB2.0 或以上 |
支持操作系统 | Android / Linux / Windows7/10 |
供电方式 | USB |
工作温度 | 10°C ~ 40°C |
适用场景 | 室内 / 室外(具体以应用场景和相关算法要求为准) |
防尘防水 | 基础防尘 |
安全性 | Class1 激光 |
尺寸(毫米) | 长59.6X宽17.4X厚11.1mm |
了解ORBBEC®Dabai的基本参数之后,开始实践操作
注:在运行命令之前,请确保其他终端中的程序已经终止,终止命令为:Ctrl+c
首先启动ORBBEC®Dabai摄像头,运行下面的命令:
roslaunch astra_camera dabai_u3.launch运行过程中会出现以下警告,这是由于驱动中的一些参数摄像头不支持,可以忽略。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
7.2 查看深度相机信息
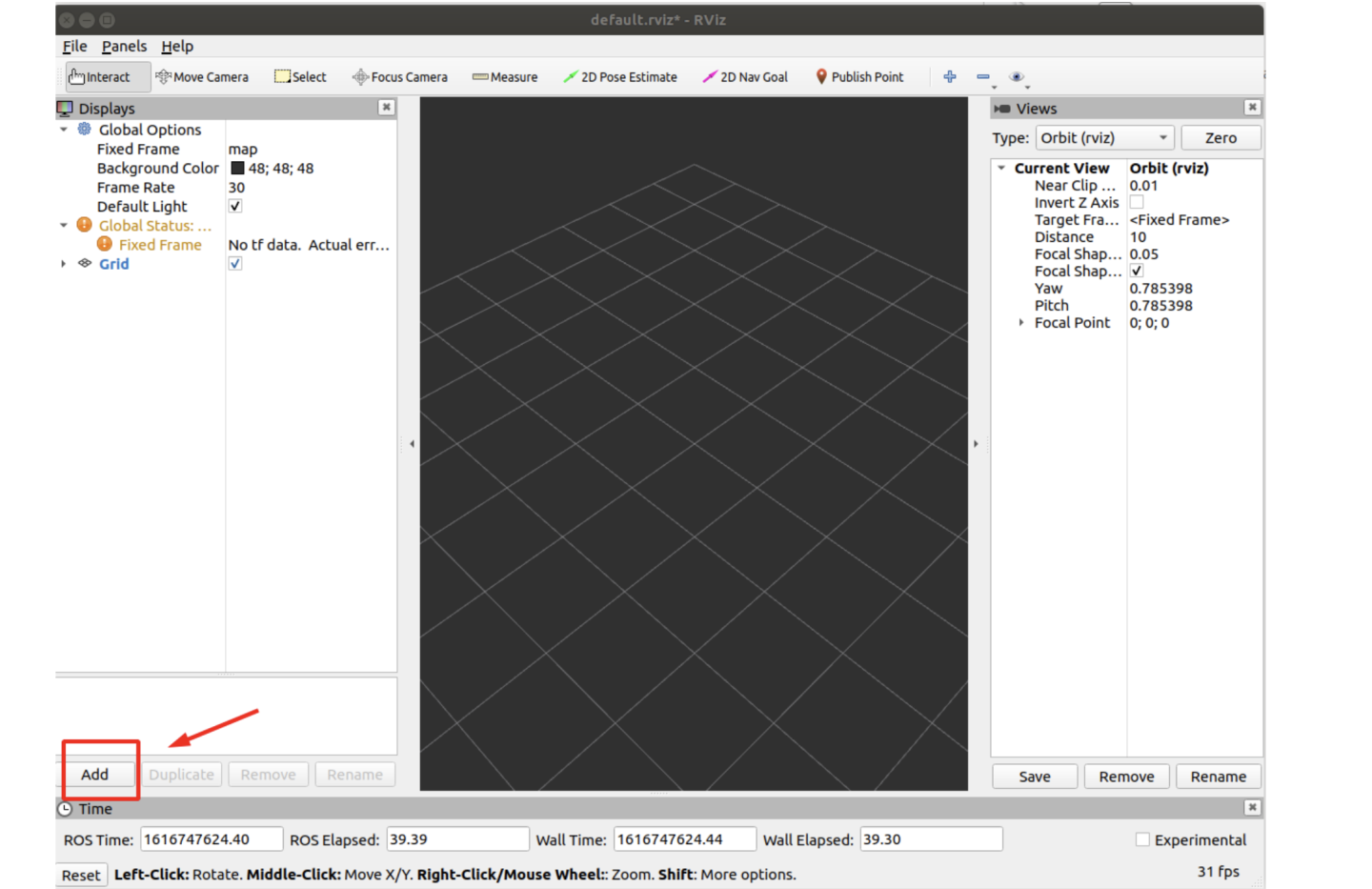
成功打开深度相机之后,接下来启动rviz,查看深度相机所拍摄到的图像和采集的深度信息。
开启一个新终端,输入命令:
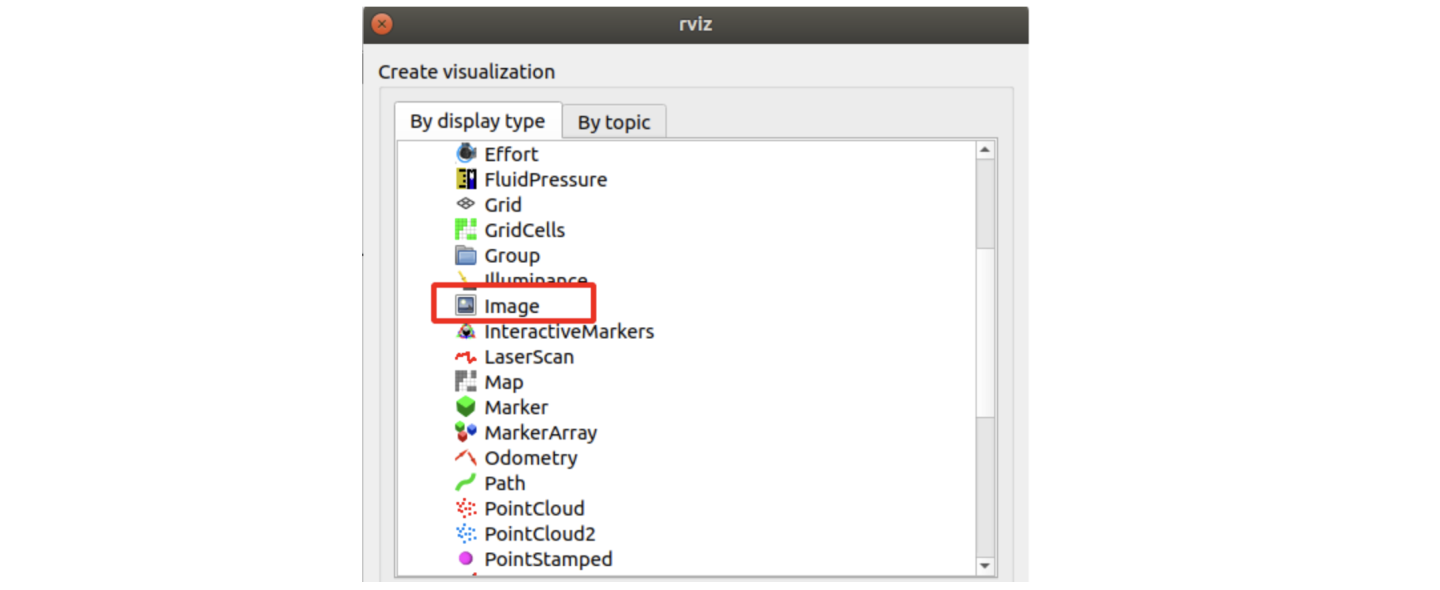
rviz然后添加Image组件就能看到摄像头所拍摄的画面,操作步骤如下。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
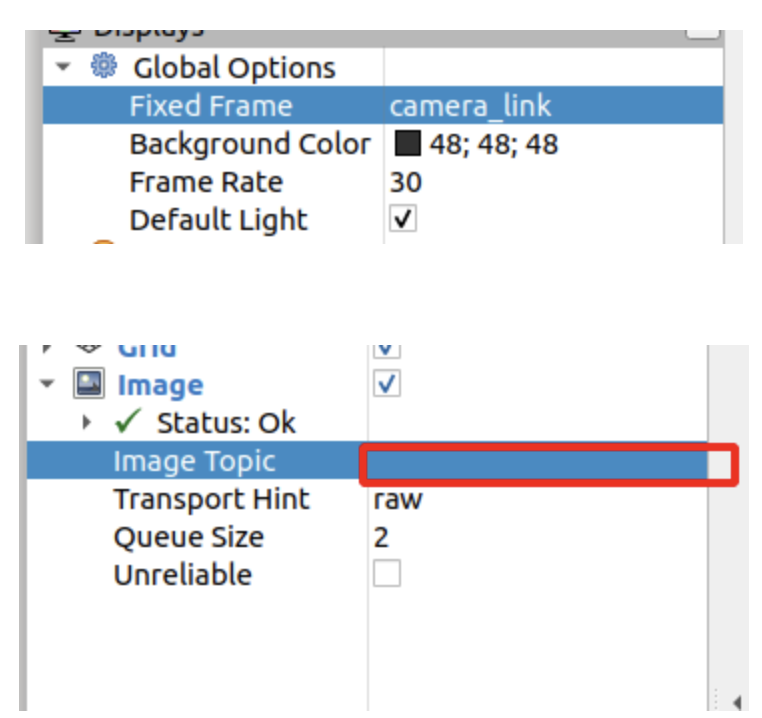
Fixed frame选择camera_link
编辑切换为居中
添加图片注释,不超过 140 字(可选)
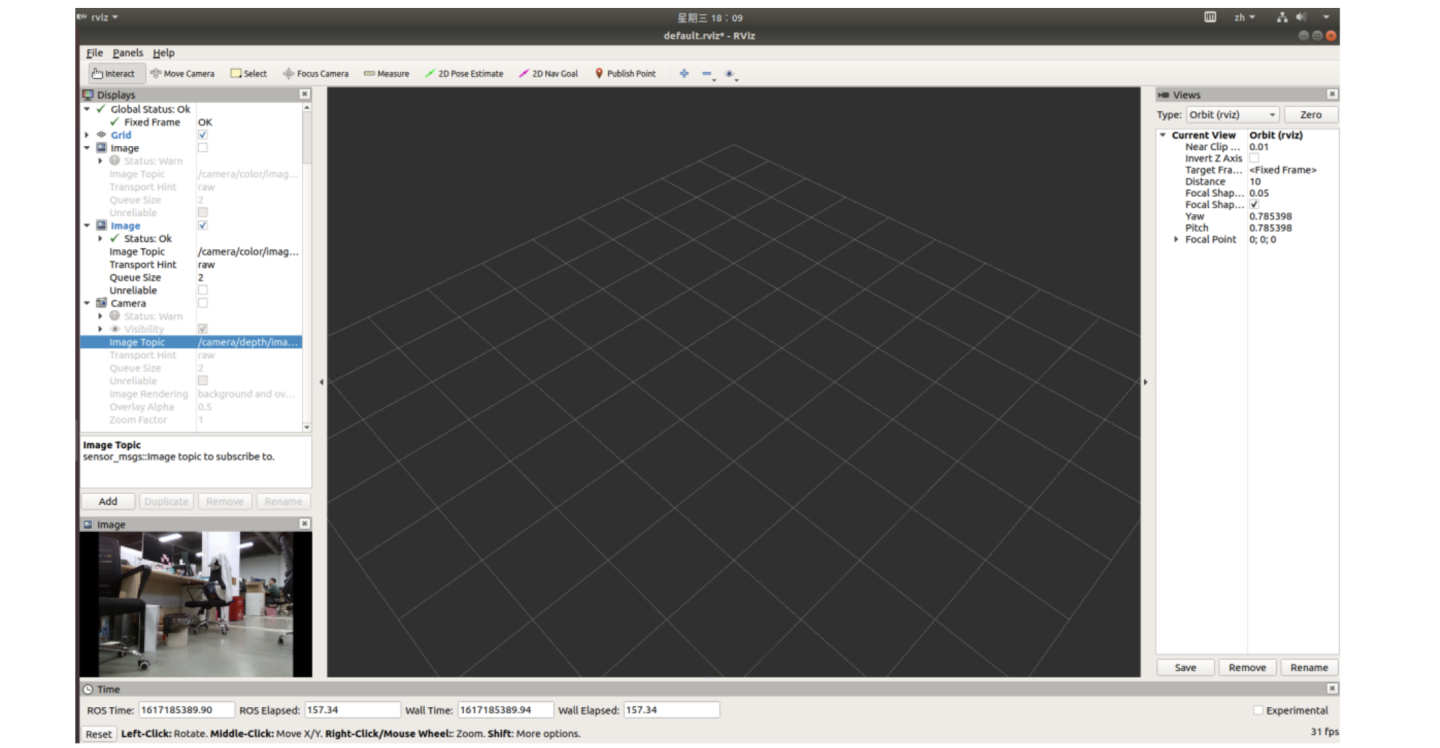
image组件填入对应的话题获取rgb图片
编辑切换为居中
添加图片注释,不超过 140 字(可选)
完成上述操作之后就能在Image窗口看到摄像头拍摄的画面了。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
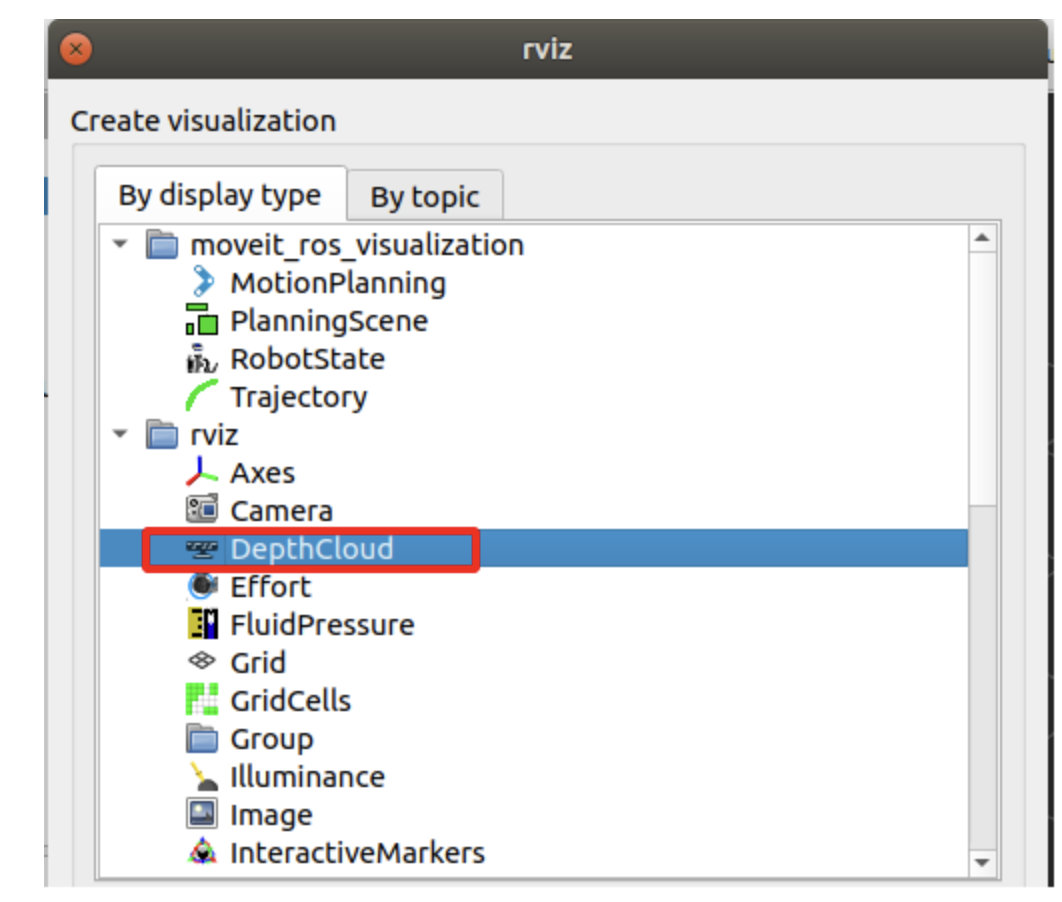
如果想要查看点云数据,点击add添加DepthCloud组件
编辑切换为居中
添加图片注释,不超过 140 字(可选)
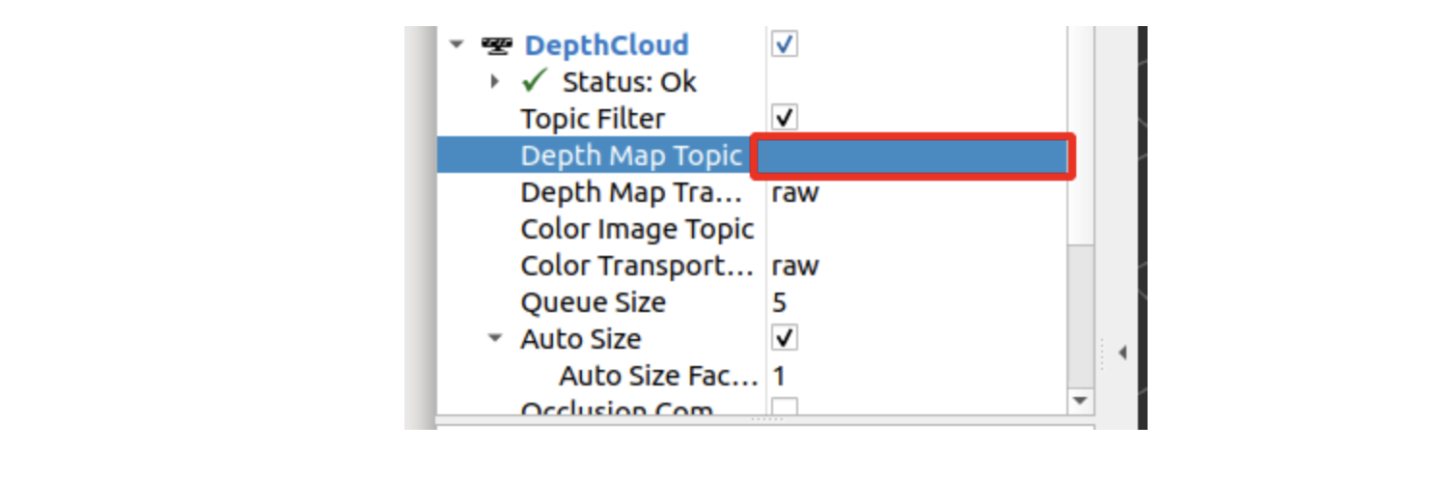
fixed frame选择camera_link, DepthCloud组件选择对应的话题
编辑切换为居中
添加图片注释,不超过 140 字(可选)
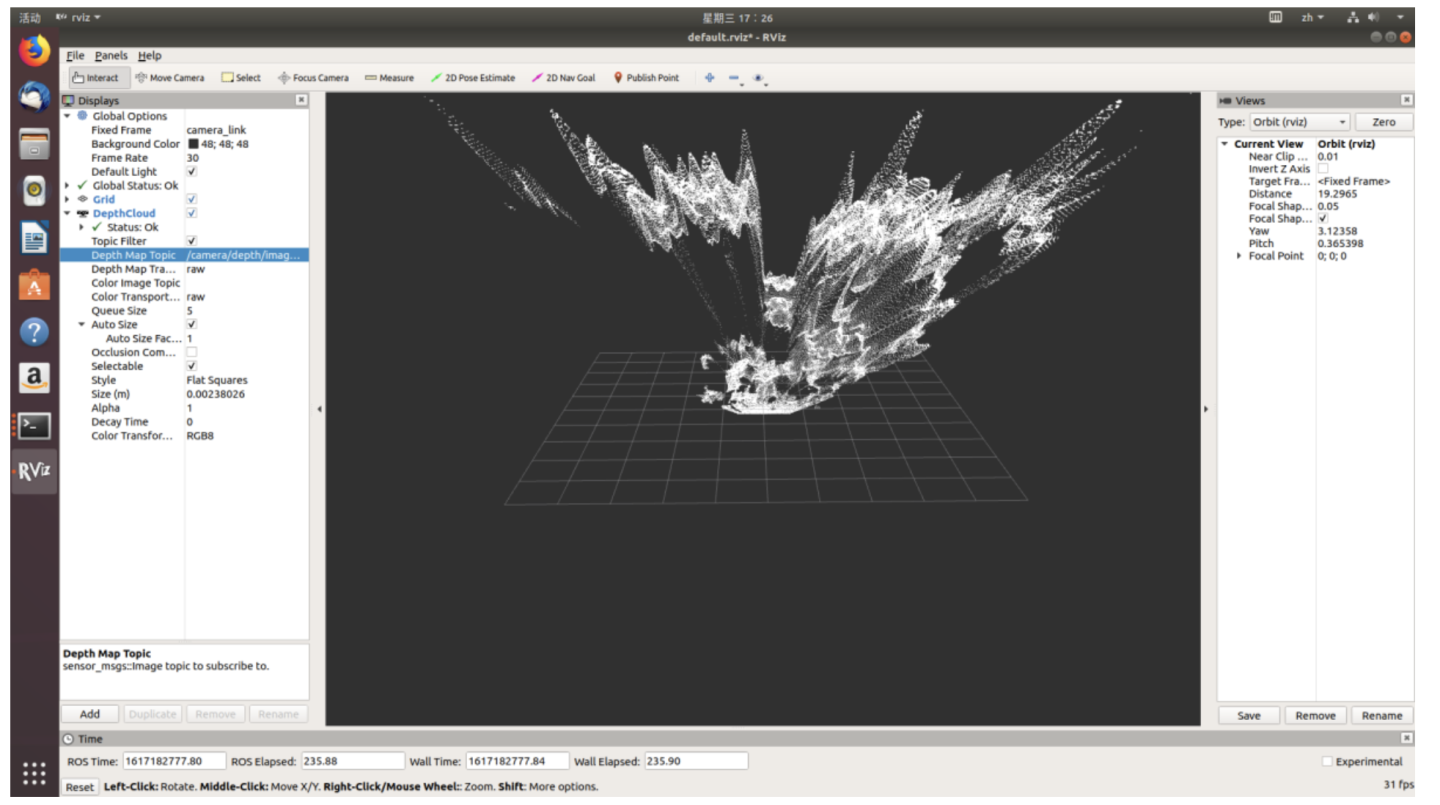
显示深度图
编辑切换为居中
添加图片注释,不超过 140 字(可选)
7.2 rtabmap算法介绍
rtabmap算法提供一个与时间和尺度无关的基于外观的定位与构图解决方案。针对解决大型环境中的在线闭环检测问题。方案的思想在于为了满足实时性的一些限制,闭环检测是仅仅利用有限数量的一些定位点,同时在需要的时候又能够访问到整个地图的定位点。
7.3 rtabmap算法建图
注:在运行命令之前,请确保其他终端中的程序已经终止,终止命令为:Ctrl+c
注:建图过程中limo的速度尽量慢点,速度太快会影响建图的效果
(1)启动雷达,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=true(2)启动ORBBEC®Dabai,在终端中输入命令:
roslaunch astra_camera dabai_u3.launch (3)启动rtabmap算法的建图模式,在终端中输入命令:
roslaunch limo_bringup limo_rtabmap_orbbec.launch(4)启动rviz查看建图效果,在终端中输入命令:
roslaunch limo_bringup rtabmap_rviz.launch 当rviz界面中出现如图 的画面时,rtabmap算法建图模式成功启动
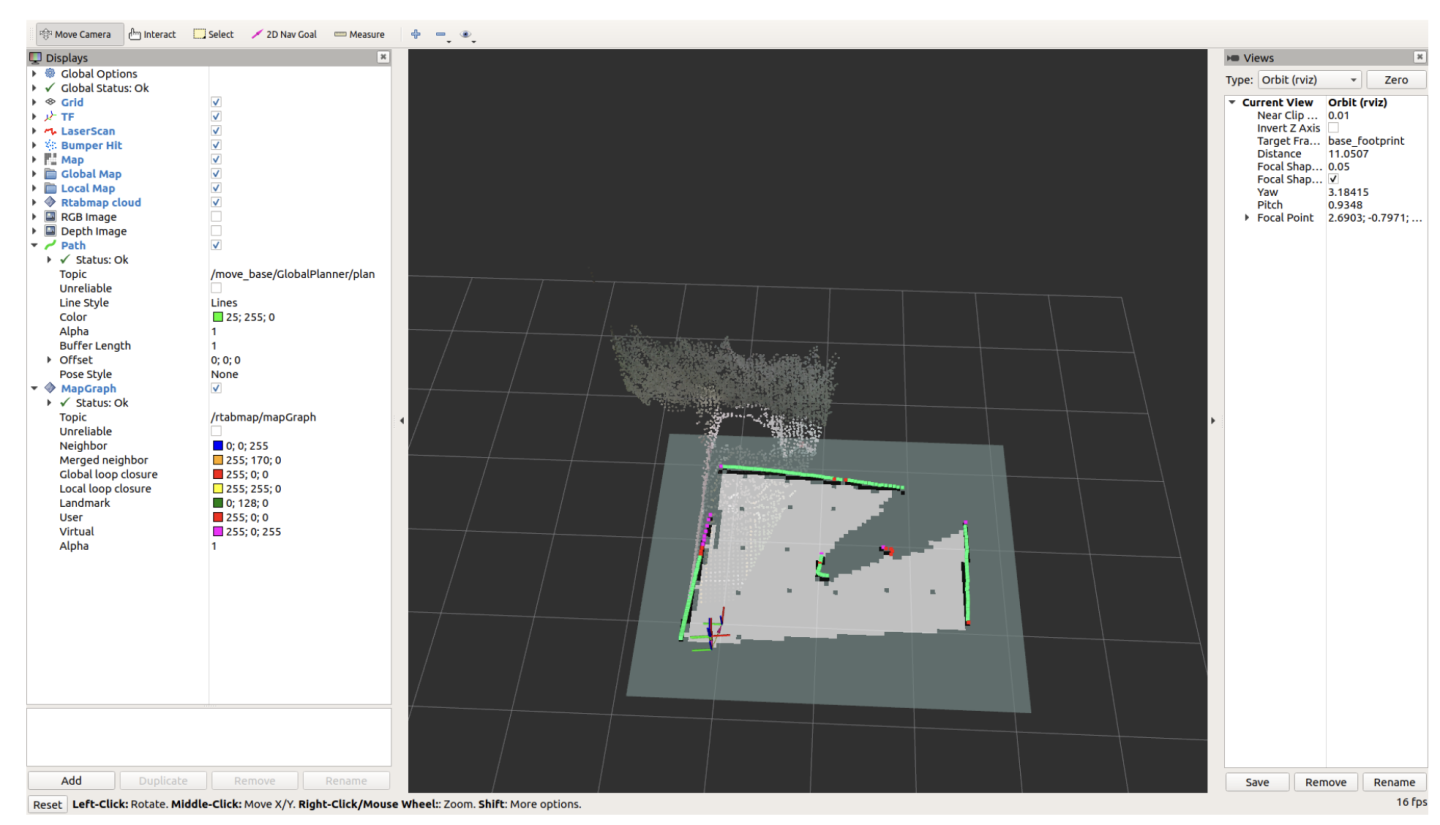
编辑切换为居中
添加图片注释,不超过 140 字(可选)
当构建完地图之后,可以直接终止程序,构建的地图将自动保存在主目录下的.ros文件中,文件名称为rtabmap.db。.ros文件夹为隐藏文件夹,需要通过Ctrl+h指令显示出来。
7.4 rtabmap算法导航
注:在运行命令之前,请确保其他终端中的程序已经终止,终止命令为:Ctrl+c
(1)启动雷达,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=true(2)启动ORBBEC®Dabai,请输入命令:
roslaunch astra_camera dabai_u3.launch (3)启动rtabmap算法的定位模式,在终端中输入命令:
roslaunch limo_bringup limo_rtabmap_orbbec.launch localization:=true(4)启动move_base,在终端中输入命令:
roslaunch limo_bringup limo_navigation_rtabmap.launch注:如果是阿克曼运动模式,请运行
roslaunch limo_bringup limo_navigation_rtabmap_ackerman.launch(5)启动rviz查看建图效果,在终端中输入命令:
roslaunch limo_bringup rtabmap_rviz.launch (6)因为我们用到视觉定位,所以在采用rtabmap导航的时候不需要校正,可以直接开始设置目标点进行导航,操作步骤如图 。
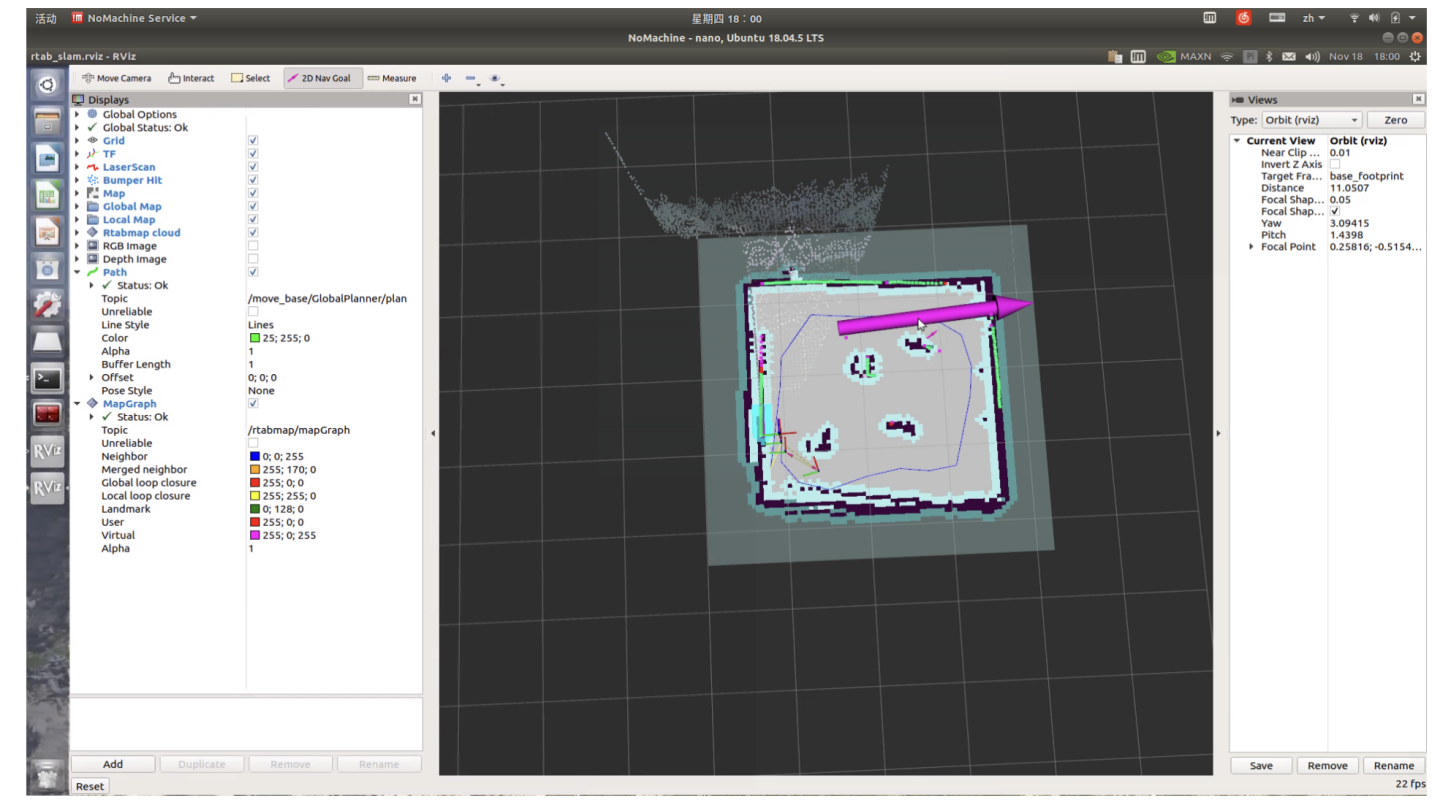
编辑切换为居中
添加图片注释,不超过 140 字(可选)
地图中将会生成一条绿色的路径,手柄切换至指令模式,limo将自动导航到目标点
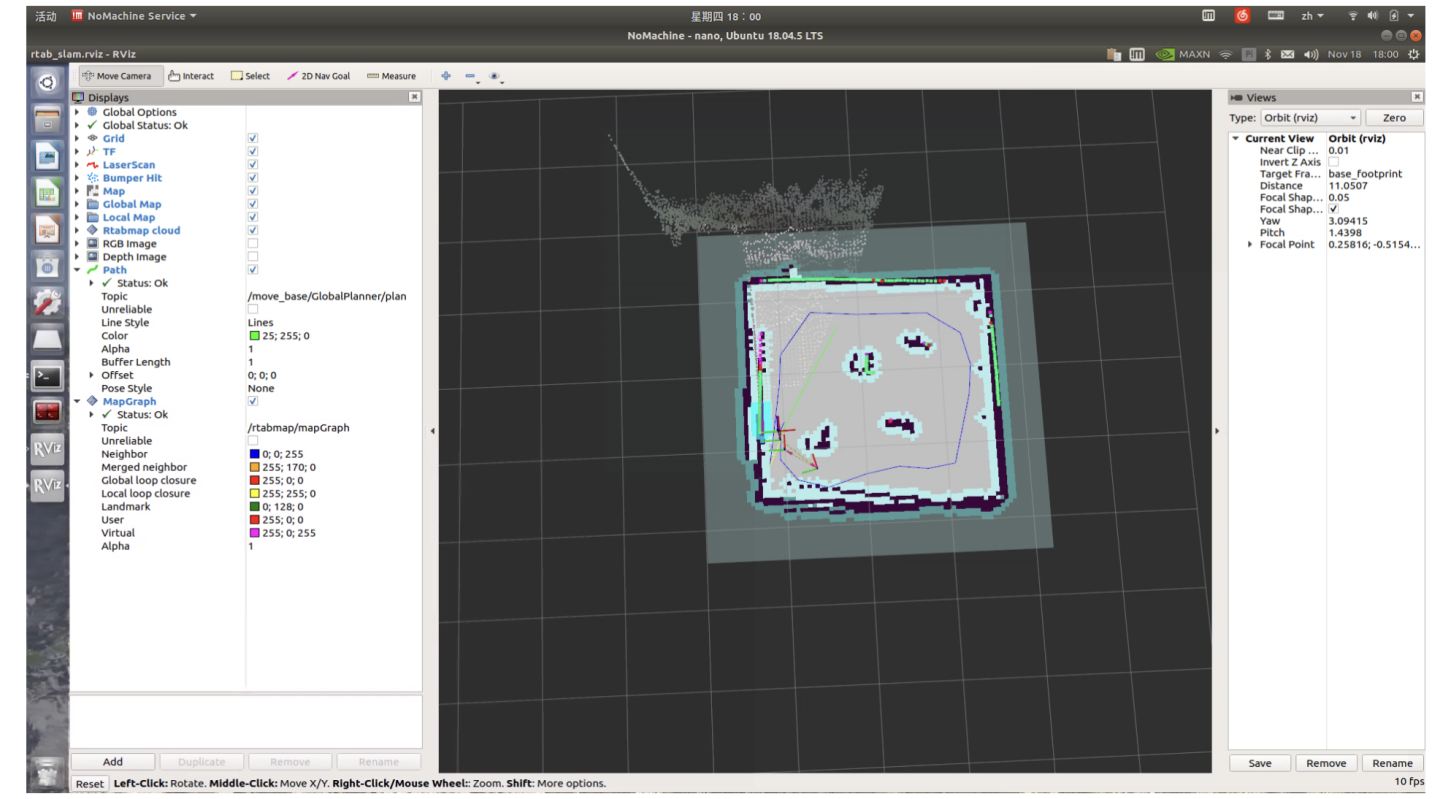
编辑切换为居中
添加图片注释,不超过 140 字(可选)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









