




 本文详细描述了如何在ROS1环境中使用IntelRealSenseD455深度相机,包括启动节点、发布消息到不同topic以及查看关键参数,如相机信息、图像数据和点云数据,以及tf静态信息。
本文详细描述了如何在ROS1环境中使用IntelRealSenseD455深度相机,包括启动节点、发布消息到不同topic以及查看关键参数,如相机信息、图像数据和点云数据,以及tf静态信息。
IntelRealSense深度相机D455在ROS1运行中的消息内容
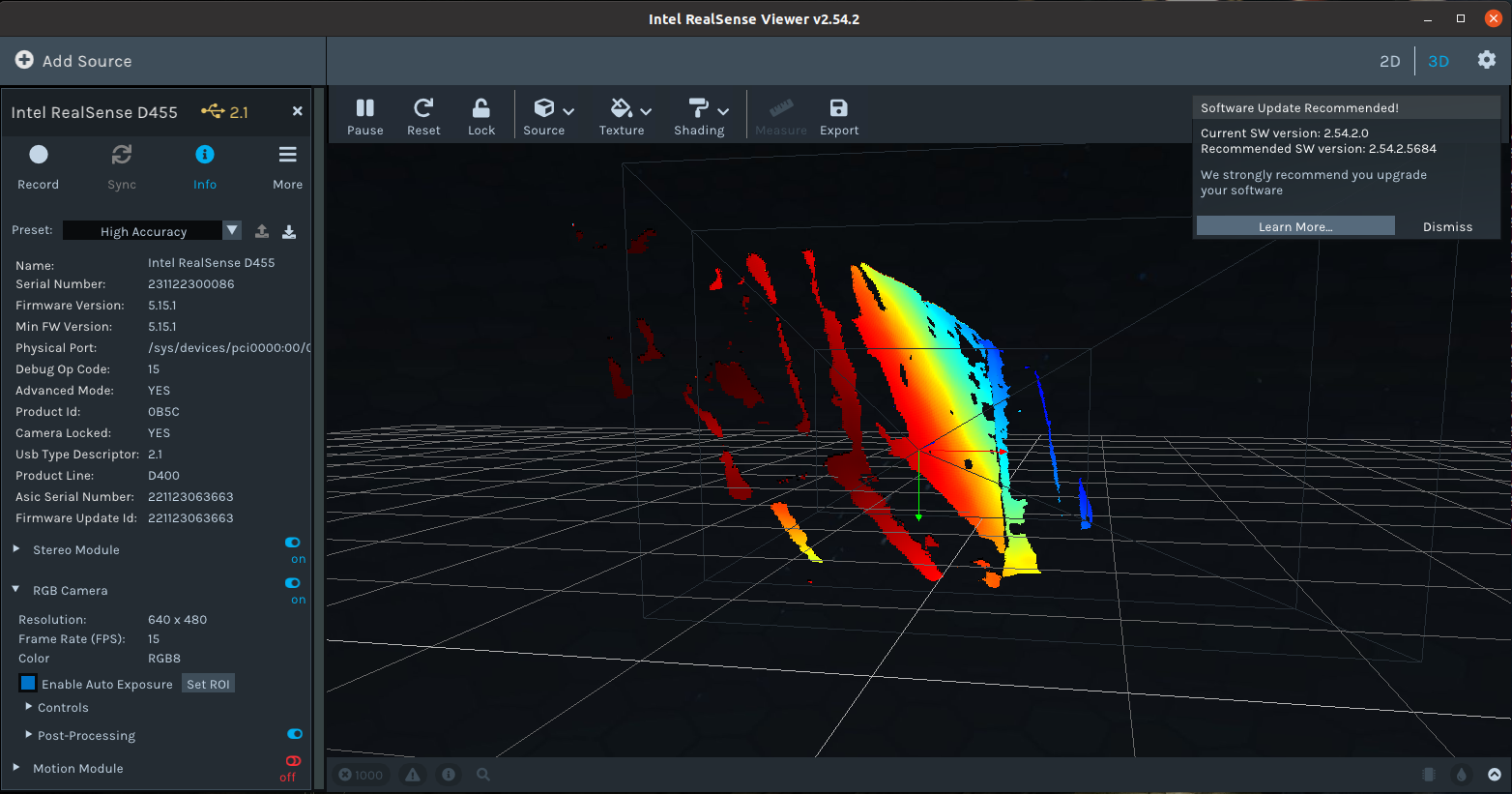
Physical Port:: /sys/devices/pci0000:00/0000:00:11.0/0000:02:03.0/usb1/1-1/1-1:1.0/video4linux
Start the camera node
To start the camera node in ROS:
通过下面命令所有相关信息通过ros topic的方式发布出去
roslaunch realsense2_camera rs_camera.launch
rosnode查看
/camera/realsense2_camera
/camera/realsense2_camera_manager
/rosout
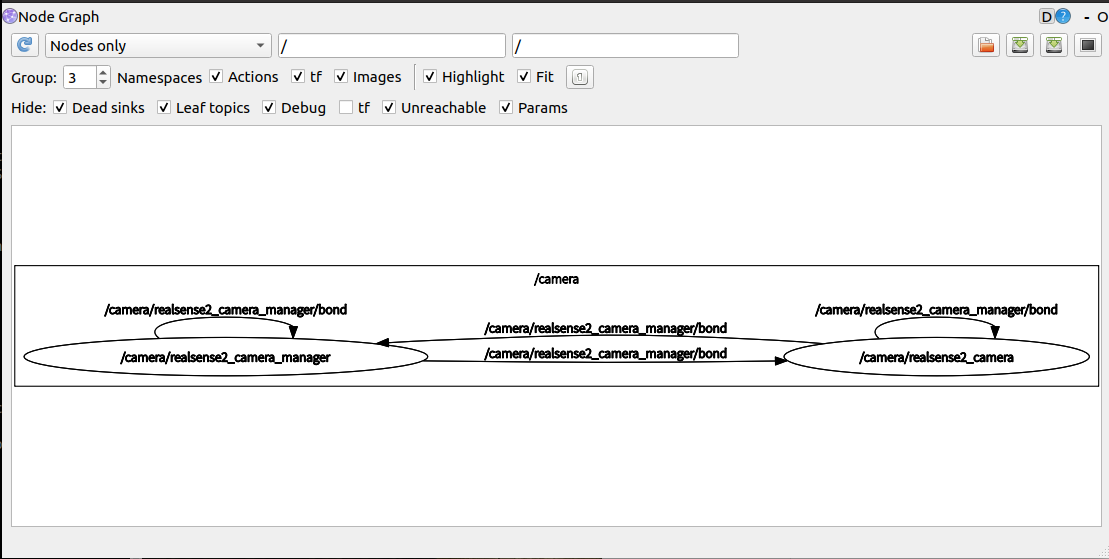
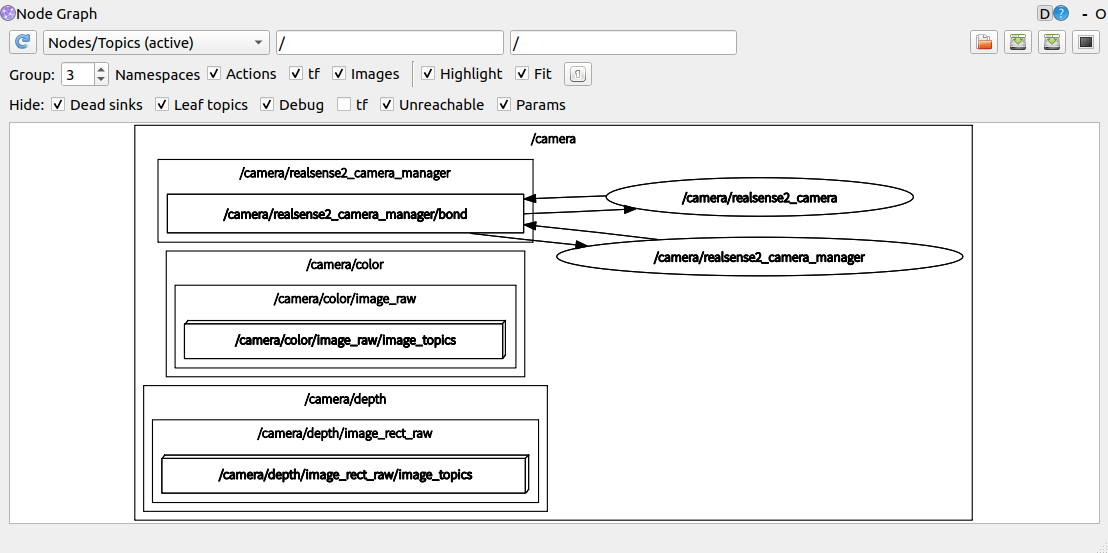
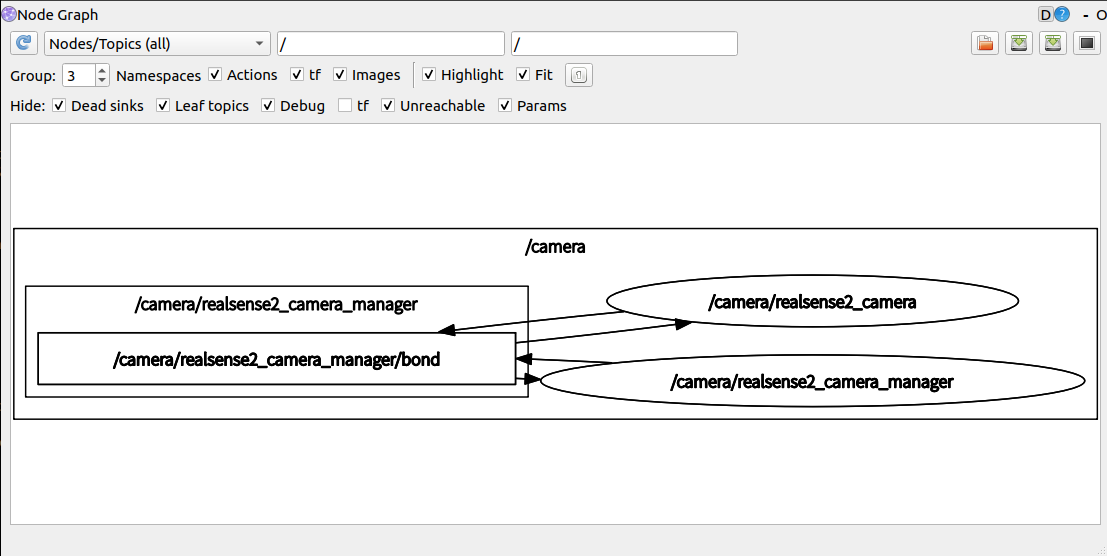
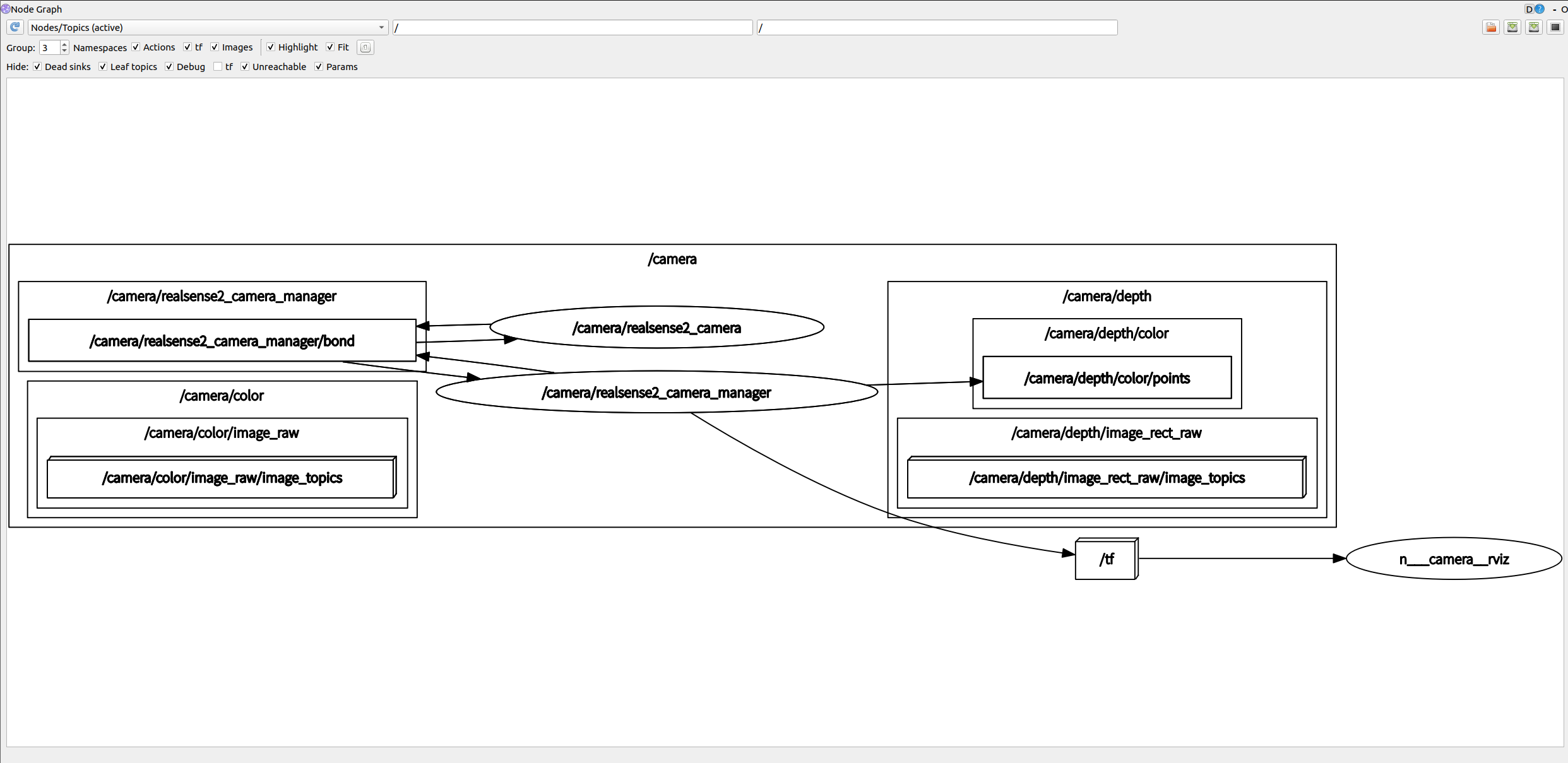
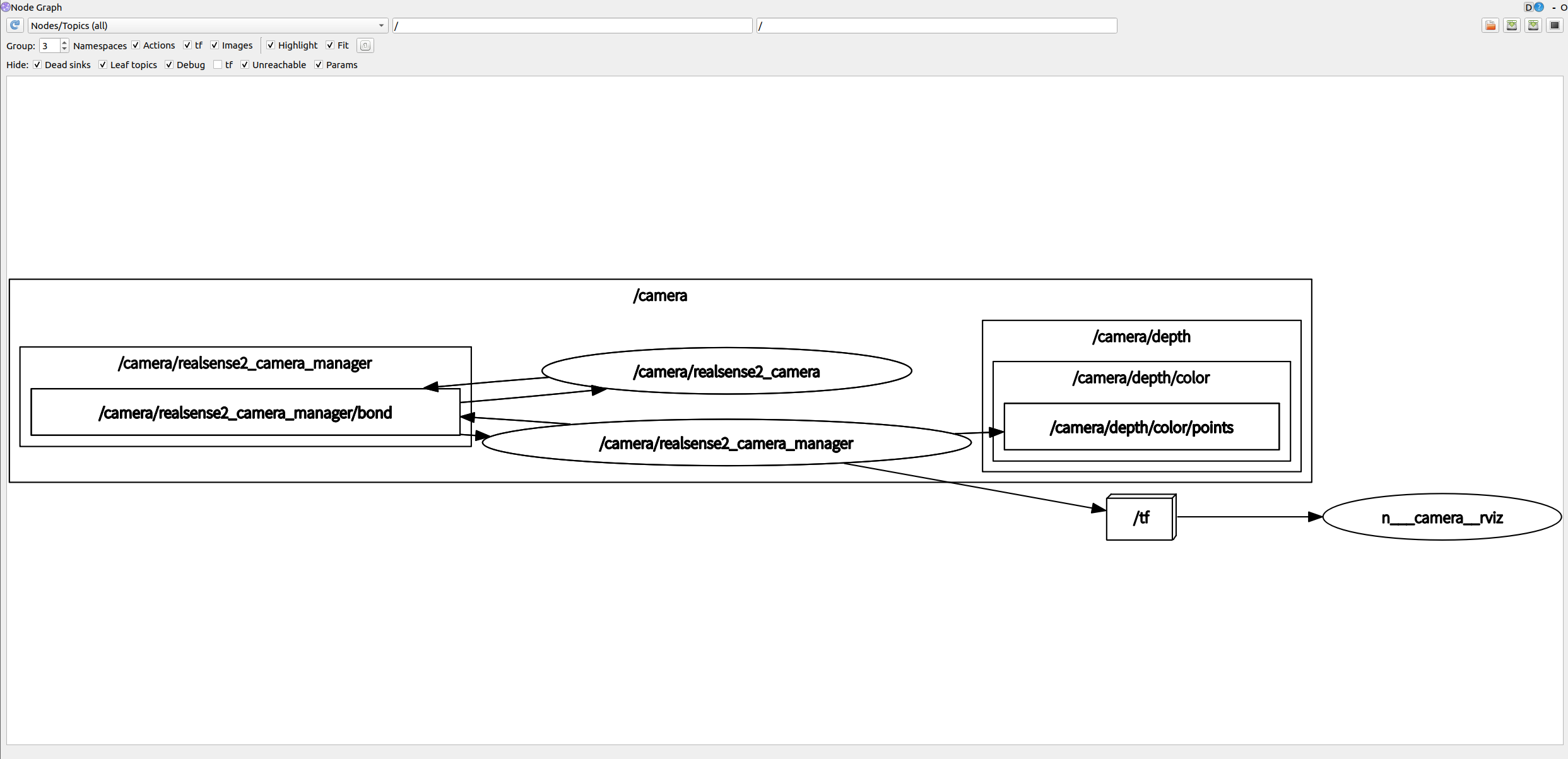
rqt_graph查看
rostopic查看
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/metadata
/camera/extrinsics/depth_to_color
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/auto_exposure_roi/parameter_descriptions
/camera/rgb_camera/auto_exposure_roi/parameter_updates
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/diagnostics
/rosout
/rosout_agg
/tf
/tf_static
/camera/color/camera_info的话题消息内容
---
header:
seq: 121
stamp:
secs: 1701757644
nsecs: 890126705
frame_id: "camera_color_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [-0.05529118701815605, 0.06646831333637238, 0.00021844496950507164, 8.94237746251747e-05, -0.021805301308631897]
K: [386.3393859863281, 0.0, 324.54986572265625, 0.0, 385.8198547363281, 241.42041015625, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [386.3393859863281, 0.0, 324.54986572265625, 0.0, 0.0, 385.8198547363281, 241.42041015625, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
/camera/depth/camera_info的话题消息内容
---
header:
seq: 41
stamp:
secs: 1701757805
nsecs: 683720589
frame_id: "camera_depth_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [386.1236267089844, 0.0, 323.4205322265625, 0.0, 386.1236267089844, 240.564453125, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [386.1236267089844, 0.0, 323.4205322265625, 0.0, 0.0, 386.1236267089844, 240.564453125, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
/camera/motion_module/parameter_descriptions /摄像机运动模块参数说明的消息内容
groups:
-
name: "Default"
type: ''
parameters:
-
name: "frames_queue_size"
type: "int"
level: 0
description: "Max number of frames you can hold at a given time. Increasing this number will reduce\
\ frame drops but increase latency, and vice versa"
edit_method: ''
-
name: "enable_motion_correction"
type: "bool"
level: 0
description: "Enable/Disable Automatic Motion Data Correction"
edit_method: ''
-
name: "global_time_enabled"
type: "bool"
level: 0
description: "Enable/Disable global timestamp"
edit_method: ''
parent: 0
id: 0
max:
bools:
-
name: "enable_motion_correction"
value: True
-
name: "global_time_enabled"
value: True
ints:
-
name: "frames_queue_size"
value: 32
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
min:
bools:
-
name: "enable_motion_correction"
value: False
-
name: "global_time_enabled"
value: False
ints:
-
name: "frames_queue_size"
value: 0
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
dflt:
bools:
-
name: "enable_motion_correction"
value: True
-
name: "global_time_enabled"
value: True
ints:
-
name: "frames_queue_size"
value: 16
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
---
/camera/stereo_module/auto_exposure_roi/parameter_descriptions 相机立体模块自动曝光roi参数说明的消息内容
groups:
-
name: "Default"
type: ''
parameters:
-
name: "left"
type: "int"
level: 0
description: "auto-exposure left coordinate"
edit_method: ''
-
name: "right"
type: "int"
level: 0
description: "auto-exposure right coordinate"
edit_method: ''
-
name: "top"
type: "int"
level: 0
description: "auto-exposure top coordinate"
edit_method: ''
-
name: "bottom"
type: "int"
level: 0
description: "auto-exposure bottom coordinate"
edit_method: ''
parent: 0
id: 0
max:
bools: []
ints:
-
name: "left"
value: 639
-
name: "right"
value: 639
-
name: "top"
value: 479
-
name: "bottom"
value: 479
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
min:
bools: []
ints:
-
name: "left"
value: 0
-
name: "right"
value: 0
-
name: "top"
value: 0
-
name: "bottom"
value: 0
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
dflt:
bools: []
ints:
-
name: "left"
value: 0
-
name: "right"
value: 639
-
name: "top"
value: 0
-
name: "bottom"
value: 479
strs: []
doubles: []
groups:
-
name: "Default"
state: True
id: 0
parent: 0
---
/tf_static的话题消息内容
-
header:
seq: 0
stamp:
secs: 1701759021
nsecs: 810140552
frame_id: "camera_color_frame"
child_frame_id: "camera_color_optical_frame"
transform:
translation:
x: 0.0
y: -0.0
z: -0.0
rotation:
x: -0.5
y: 0.4999999999999999
z: -0.5
w: 0.5000000000000001
---
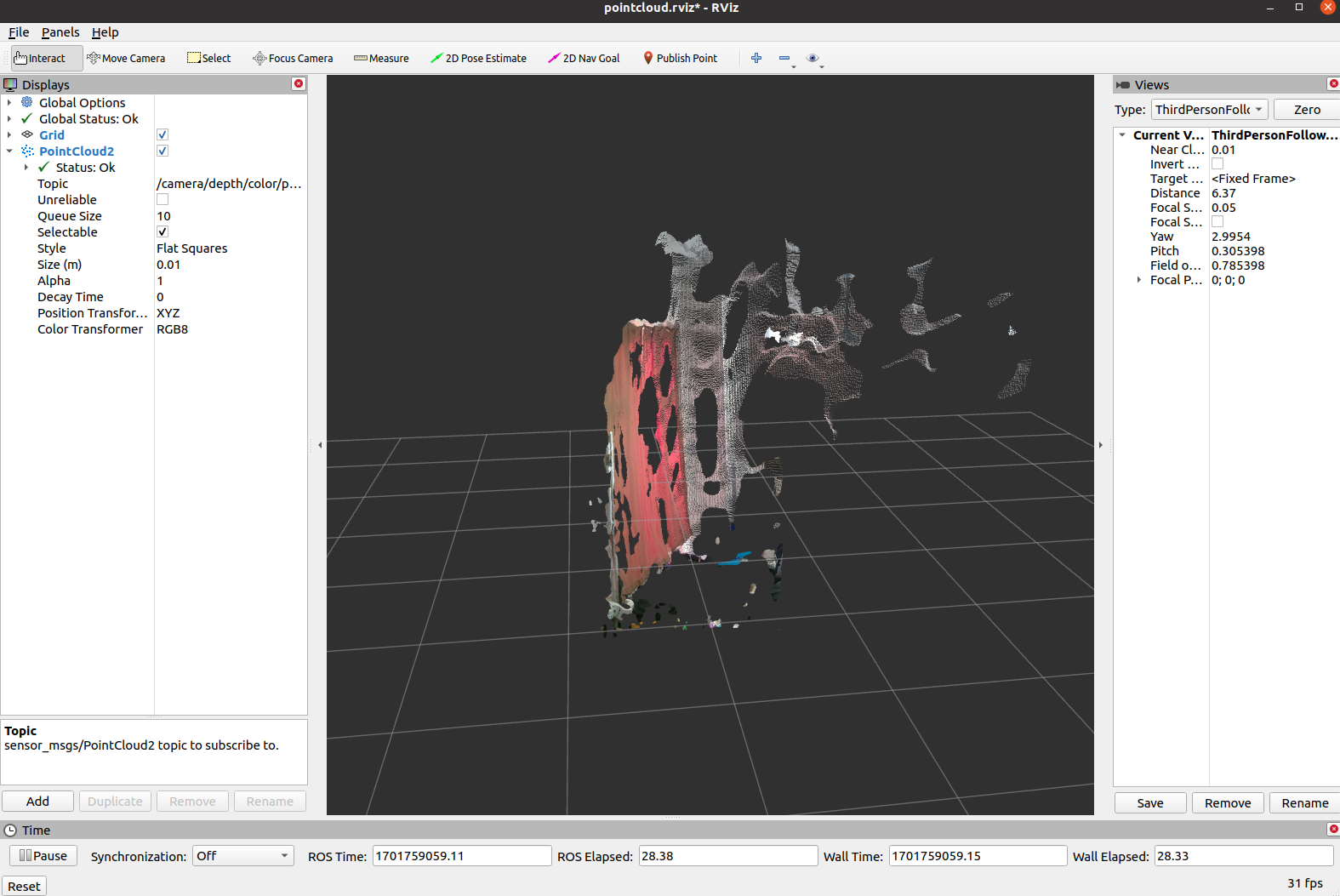
通过下面命令直接查看RVIZ中点云信息
roslaunch realsense2_camera demo_pointcloud.launch
rosnode查看
/camera/realsense2_camera
/camera/realsense2_camera_manager
/camera/rviz
/rosout
rqt_graph查看
rostopic查看
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/color/points
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/metadata
/camera/extrinsics/depth_to_color
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/pointcloud/parameter_descriptions
/camera/pointcloud/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/auto_exposure_roi/parameter_descriptions
/camera/rgb_camera/auto_exposure_roi/parameter_updates
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/clicked_point
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static
比之前运行多了一些话题
/camera/pointcloud/parameter_descriptions
/camera/pointcloud/parameter_updates
/clicked_point
/initialpose
/move_base_simple/goal



















 8268
8268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











