




这一次终于可以正式发布了,以前也进行过零星的尝试,比如地面站 Control Station Studio,BBP控制板什么的。但毕竟它们毕竟都只是一个组成部分而非全系统,进而无法实现开发实践的闭环,所以后来都无疾而终了。
一个完整的无人机系统,至少需要以下一些必备的组成:飞行控制软件、控制板硬件、地面控制站软件、飞行平台,还有一个非常重要却又最容易被忽视的:文档教程。只有当这些东西大致齐备且易于获取之后,用户才能完整的感受这套系统,才能提出新的需求和宝贵的意见建议,从而和我们一起推动这套系统不断的发展和完善。
所幸的是,在付出大量的时间、精力,在经历了一次又一次的失败挫折,还有每次前进一点点的喜悦之后,到现在,上面提到的关键组成部分已经基本齐备了。我们所构建的PH47运动控制代码框架目前已经到达了起跑线。
PH47运动控制代码框架的前世今生
前几年通过飞控软件SinglePilot以及两种对应的飞控板SinglePilot、PH7的开发,我们验证和掌握了多轴及固定翼飞行控制软硬件的关键性技术要点。由于初始飞控软件架构的限制,以及飞控板的过高成本,我们决定关键点得到验证之后,彻底推翻之前SinglePilot飞控的总体架构,在已积累经验基础上开发全新、通用、且对二次开发高度友好的飞控软硬件建构,这就是目前即将发布的PH47运动控制代码框架。
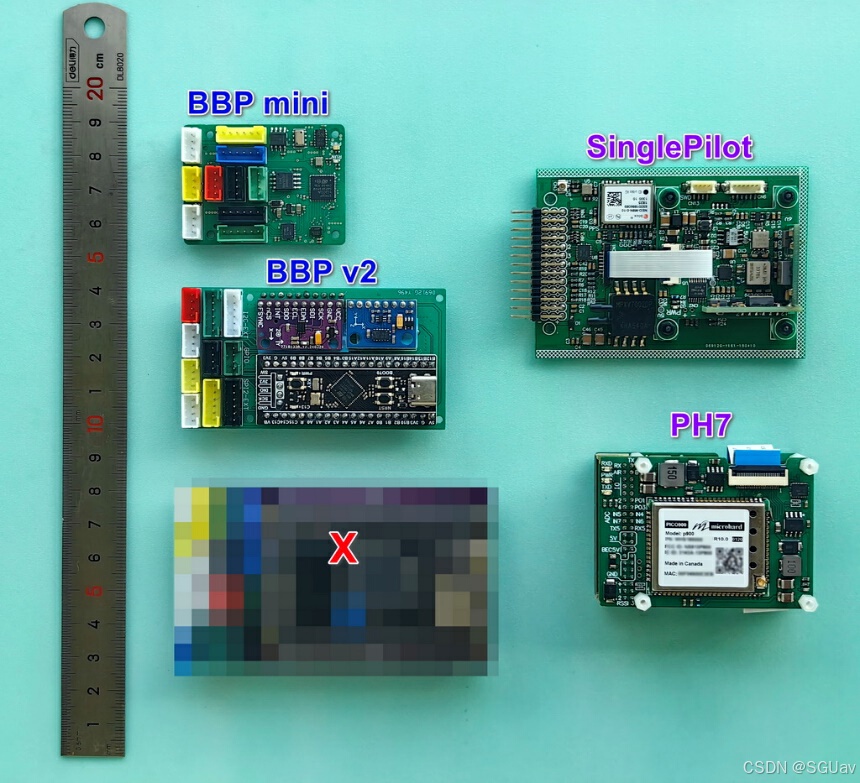
之前基于Stm32F429的飞控SinglePilot:
- 采用高性能工业级ADXRS626陀螺,具有优异的工作稳定性
- 一体化集成设计,板载空速计及GPS模块。
- 硬件成本高昂
- 制造相对复杂
基于Stm32H743的PH7飞控:
- 采用工业级ADXRS620陀螺,具有优异的工作稳定性
- MCU硬件性能更加强悍,接口更加丰富
- 高度集成化设计,除板载空速计及GPS外,还集成了数传电台以及电源供应模块。
- 主板+扩展板设计提供了充分的拓展自由度
- 丰富的对外扩展接口
- 小型化设计,体积比Single Pilot更小
- 硬件成本低于SinglePilot,但依然较高。
- 制造相对复杂
综上,PH7飞控至今依然是我们飞控系列中具有最佳性能表现的型号,除了价格比较高之外。
目前新一代BBP系列飞控
不过,值得高兴的是,在本次发布BBP V2以及BBP mini飞控板的稍后时间,我们将推出硬件性能与PH7类似,扩展灵活性更强,集成度略低(体积和功能模块方面),但是采购价格及制造难度远低于PH7的新飞控板X,敬请期待!
目前,PH47运动控制代码框架包含3种控制板设计(BBP v2、BBP mini、X),以及3种固件(多传感器基础平台BBDB、固定翼飞控Fixedwing、多轴飞控Copter),目前首先发布的是对二次开发高度友好的多传感器基础平台BBDB(事实上我们的Copter多轴飞控就是在BBDB基础上二次开发的),在此平台之上,用户可非常方便的进行固定翼、多轴、无人车、船,以及其他需要进行运动状态测量及控制应用的二次开发。而固定翼、多轴控制固件目前正在实际试飞测试过程中。我们也迫切期望您能加入帮助我们测试甚至是开发的行列!
接下来,就开始进行PH47框架教程的连载介绍。初步构想是每1到2周更新一次,同时根据教程的深入,对应提供框架相关代码开发包、对应软件,以及控制板设计资料等必要内容。衷心希望大家能够在评论区提出宝贵的疑问、见解、意见、吐槽等等等等。开发教程也会根据大家的反馈及时的进行调整和修改补充。感兴趣的朋友可以联系我(VX:SG_Uav)了解更多关于PH47代码框架内容。
以下为即将陆续进行连载的第一章内容:
- 1. PH47运动控制代码框架
- 2. PH47代码框架二次开发功能特性
- 3. BBP系列运动控制板(飞控板)简介
- 4. PH47代码框架固件功能概述
- 5. PH47 代码框架软件开发环境搭建
- 6. PH47 代码框架硬件开发环境搭建
- 7. BBP 控制板首次运行步骤说明
- 8. Control Station Studio控制站开发平台概述
- 9. Control Station Studio 控制站工程搭建

















 1380
1380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









