







 在Automotive radar信号处理中,方位估计是关键的一环,它能帮助区分同一距离上的不同目标。通过天线阵列在空域进行处理,结合FMCW脉冲,可以获取目标的方位角信息。文章介绍了方位估计的原理,包括天线阵列间距、目标位置与速度的关系,并提及3D-FFT在获取距离、速度和角度信息中的应用。
在Automotive radar信号处理中,方位估计是关键的一环,它能帮助区分同一距离上的不同目标。通过天线阵列在空域进行处理,结合FMCW脉冲,可以获取目标的方位角信息。文章介绍了方位估计的原理,包括天线阵列间距、目标位置与速度的关系,并提及3D-FFT在获取距离、速度和角度信息中的应用。
在上一节中“Automotive radar 信号处理 第2课 速度估计”中,通过FMCW这样的宽脉冲可以对目标的距离和速度进行分辨。
在实际的应用场景下,在获得目标的距离和速度信息后,为了对车辆周围的行驶环境形成更好的感知,就需要对目标进行方位估计。
如图,在车辆行驶的前方的某一个距离上有两辆汽车,此时就需要通过方位估计来区别这两个位于同一距离位置上的目标。
利用FMCW的脉冲可以在快时间维和慢时间维分别得到目标的距离和相对速度。
对于目标的方位估计,则由天线阵列决定,因此,方位估计不同于距离和相对速度的估计,处于另一个维度:空域。
结合前面给出的例子,对于automotive radar中目标的位置和方位信息可以设为 ( R , θ , ϕ ) (R,\theta,\phi) (R,θ,ϕ),其中 ( θ , ϕ ) (\theta,\phi) (θ,ϕ)分别表示目标的方位角和俯仰角。由于automotive radar中的方位估计是从空域进行处理,所以需要多个天线进行估计。需要说明的是,对于目标物体的距离和相对速度的估计,单个天线就可以解决。
若要获得目标的方位角以及俯仰角,则需要两个维度的天线阵列。也就是说,如果我们采用FMCW脉冲,一般利用一个一维的ULA线性阵就可以得到目标的方位角,此时,目标的方位角和俯仰角可以由一个二维的ULA线性阵估计得到。此外,毫米波较小的波长对应较小的孔径,因此,在设计天线阵的时候,许多阵元被密布排列着,这样可以得到更好的角度分辨率。
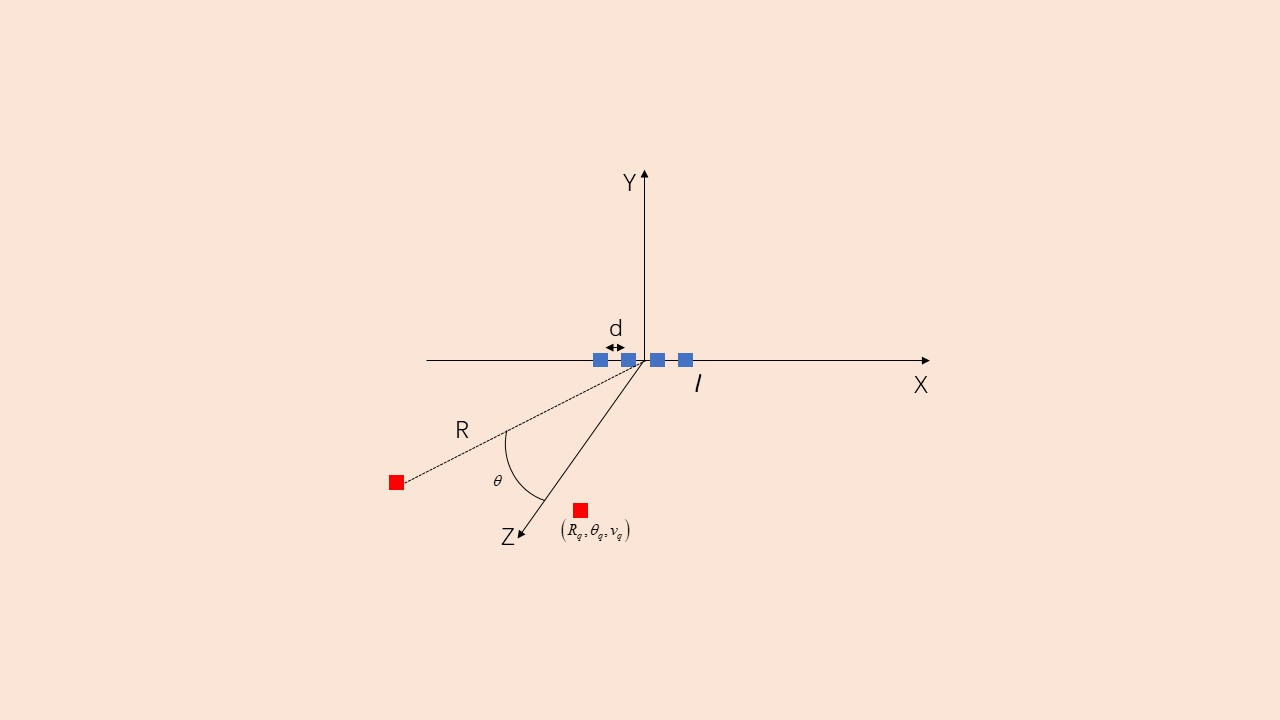
设天线阵列位于 z = 0 z=0 z=0的平面内,令 ( R q , θ q ) (R_q,\theta_q) (Rq,θq)为第 q q q个目标的位置和方位角, v q v_q vq为该目标相对于雷达的运动速度。因此,我们可以得到该远场目标位于第 l l l个阵元时,发射信号的来回时间为
τ l q = 2 ( R q + v q t ) + l d s i n θ q c \
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 488
488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









