







 本文介绍了汽车雷达如何利用多普勒效应进行速度估计。通过调频连续波(FMCW)雷达,结合距离和多普勒频移信息,实现对目标车辆速度的精确探测。并探讨了FMCW雷达的信号处理过程,包括快时间与慢时间的傅里叶变换,生成距离-多普勒图。
本文介绍了汽车雷达如何利用多普勒效应进行速度估计。通过调频连续波(FMCW)雷达,结合距离和多普勒频移信息,实现对目标车辆速度的精确探测。并探讨了FMCW雷达的信号处理过程,包括快时间与慢时间的傅里叶变换,生成距离-多普勒图。
之前我们对automotive radar中的距离估计的原理进行了介绍,然后我们进入下一个基本问题,速度估计。
Automotive radar是根据多普勒效应对目标的速度进行估计的。
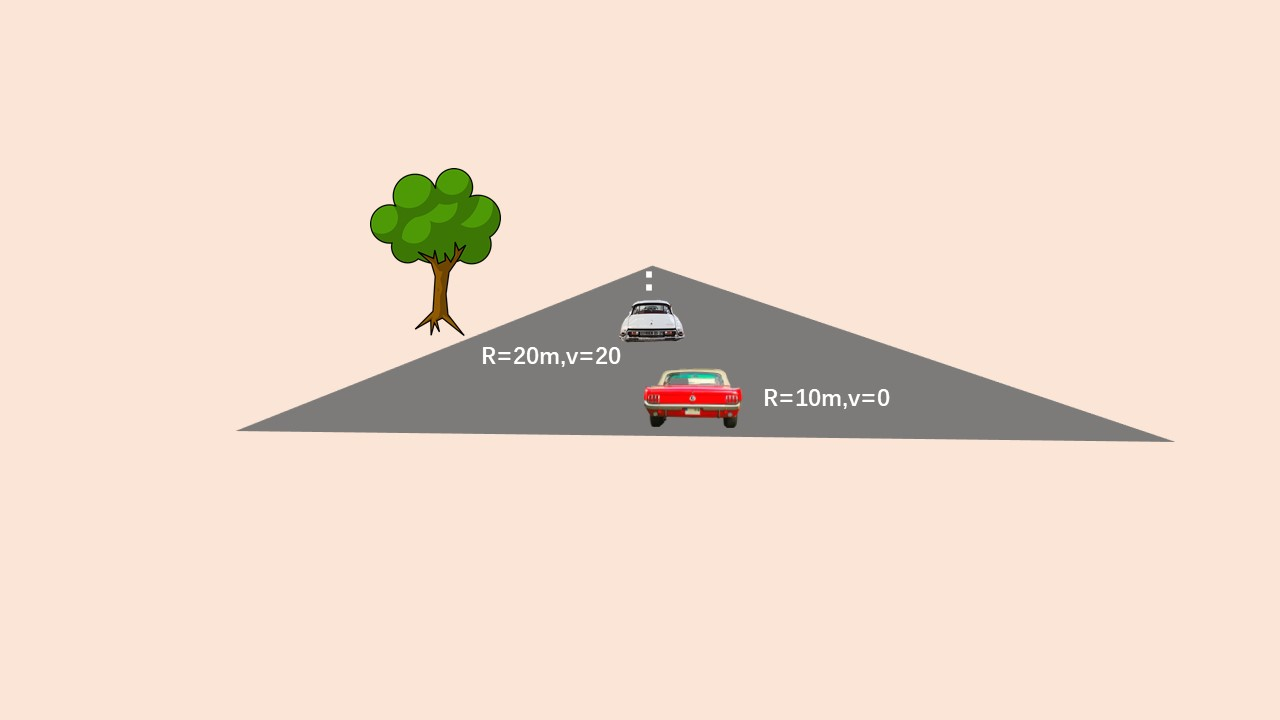
假设现在有两辆汽车,其中一辆汽车在另一辆汽车的前方以不同的行驶速度相对运动着,此时雷达反射回波的来回时间 τ = ( 2 ( R ± v t ) / c ) \tau=(2(R\pm vt)/c) τ=(2(R±vt)/c),来回时间的不同造成了雷达接收回波信号的多普勒频移 f d = ( ± 2 v / λ ) f_d=(\pm2v/\lambda) fd=(±2v/λ)。多普勒频移与波长 λ \lambda λ成反比,其符号的正负则给出了目标物体在运动的过程中远离,靠近雷达的运动状态。
之前在距离估计的问题中,有提到一个问题:
未经调制的调制的连续波信号不能用于距离估计
也就是说,连续波(CW)雷达虽然可以用于探测多普勒频移,但是不能有效的给出目标的位置信息。因此,在下面的讨论和仿真结果中,我们采用了调频连续波(FMCW),以实现真实环境下多个目标的距离,速度信息的获取。
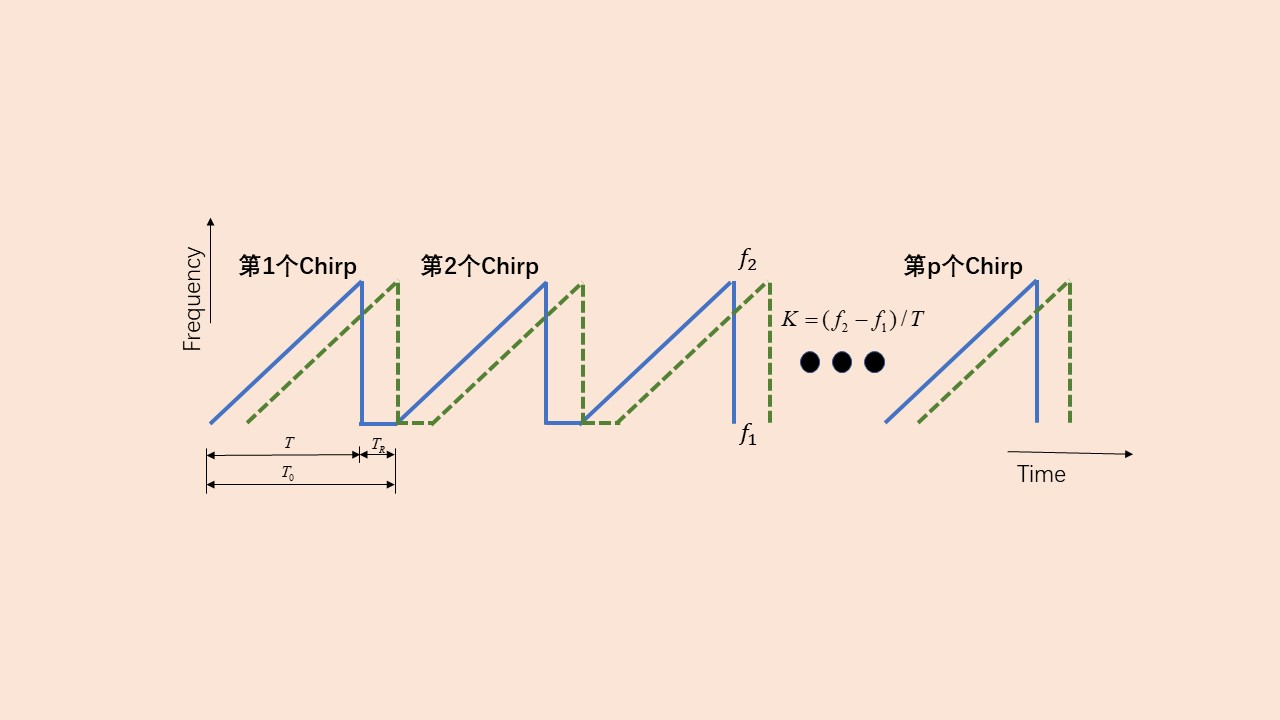
FMCW雷达利用周期的宽带调频脉冲信号,脉冲信号的角频率随时间线性增加。当已知载频 f c f_c f
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 488
488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









